Clear Sky Science · ru
Улучшение выделения дорог в дистанционном зондировании с помощью DS-Unet с дополняющим вниманием и суррогатными градиентами
Более чёткие карты из космоса
Современные цифровые карты во многом зависят от спутниковых и аэрофотоснимков, но автоматическое выделение дорог на этих изображениях оказывается удивительно сложной задачей. Тени, деревья, грунтовые тропы и сезонные изменения могут путать программы, приводя к разрывам или ложным дорогам на карте. В этой работе предложен новый метод анализа изображений под названием DS-Unet, цель которого — восстанавливать более чистые и полные дорожные сети из данных дистанционного зондирования, делая будущие карты надёжнее для навигации, планирования и реагирования при бедствиях.
Почему поиск дорог так сложен
С высоты дороги в реальном мире вьются через города, сельхозугодья и промышленные зоны, часто скрытые за зданиями, растительностью и меняющимся освещением. Традиционные системы глубокого обучения, которые уже лежат в основе многих картографических сервисов, рассматривают изображение по частям. Они хорошо обнаруживают локальные шаблоны, например полосу асфальта, но испытывают трудности с пониманием того, как разрозненные фрагменты соединяются в непрерывную дорогу. В результате такие системы могут не заметить узкие улицы в плотных деревнях, разрывать длинные шоссе на фрагменты или путать похожие по виду объекты — например, грунтовые тропы или разметку на парковках — с настоящими дорогами.
Новый способ объединения видимого сети
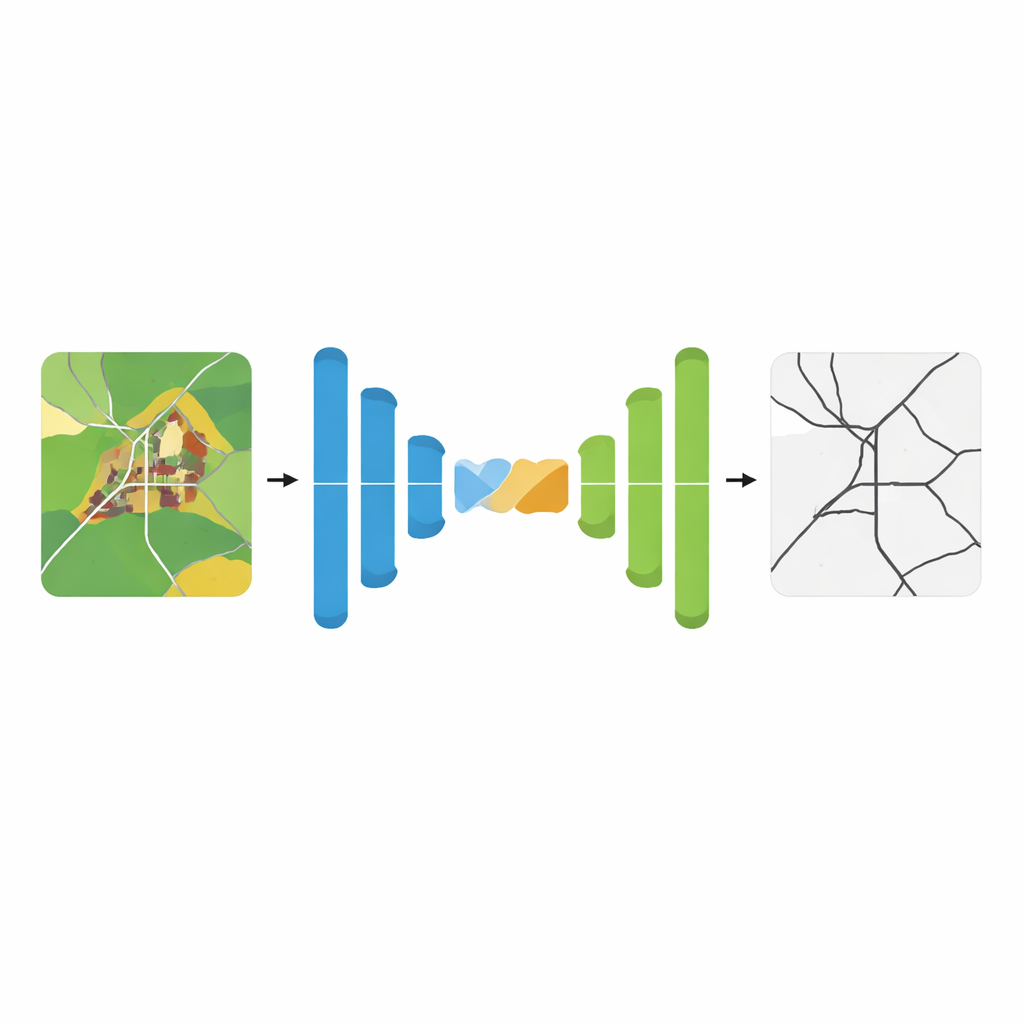
DS-Unet строится на популярной архитектуре нейросетей, которая пропускает изображение по сжимающему пути (сводящему детали) и расширяющему пути (восстанавливающему предсказание в полном разрешении). Классические решения связывают эти пути простыми соединениями, которые передают ранние визуальные детали. Авторы утверждают, что такие соединения смешивают информацию грубым способом, часто объединяя полезные контуры дорог с отвлекающими фоновыми паттернами. DS-Unet заменяет их более продвинутым связующим элементом — Модулем Дополняющего Внимания (Complementary Attention Fusion Module), который пытается выделить нужные детали, одновременно учитывая общую картину.
Дать сети сосредоточиться и охватить широкую область
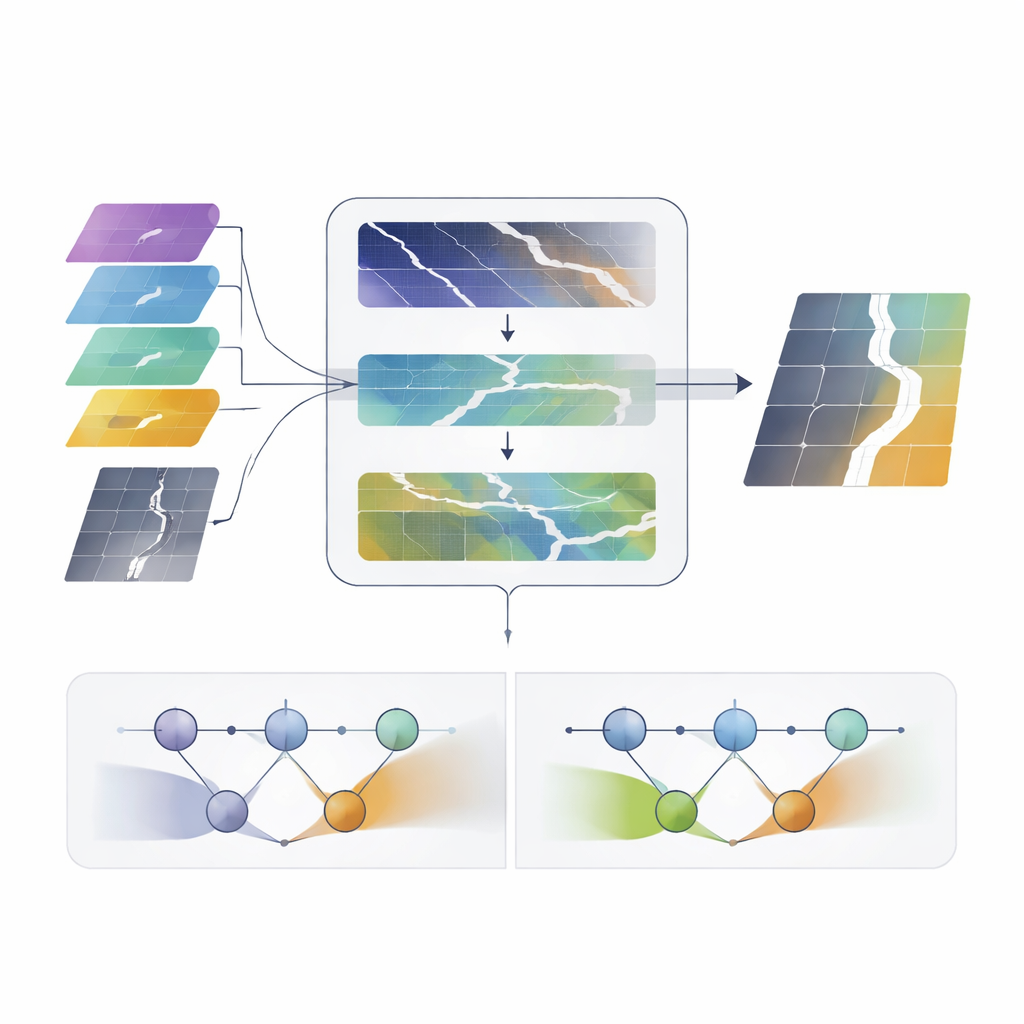
Новый модуль слияния работает в двух взаимодополняющих этапах. Сначала «дискриминирующий» этап фокусируется на том, что выделяет дороги на фоне окружения. По сути он вычитает широкие, низкочастотные фоновые паттерны из карт признаков, действуя как фильтр верхних частот, который делает контуры и текстуры дорог более чёткими и подавляет помехи вроде полей или крыш. Затем этап «глобального контекста» собирает информацию по всему изображению, чтобы удалённые сегменты дороги можно было рассматривать как часть единой сети. Сочетая эти два взгляда, модель лучше сохраняет тонкие сетчатые улицы в деревнях и поддерживает непрерывность петель и изгибов в промышленных зонах.
Сохранение процесса обучения активным
Глубокие сети обучаются путём настройки множества внутренних «нейронов», но распространённая функция активации, известная своей простотой и скоростью, может привести к тому, что некоторые нейроны перестают обновляться вовсе. Когда слишком многие «замолкают», обучение становится нестабильным, а конечные предсказания теряют тонкие детали. Чтобы этого избежать, авторы применяют приём, который называют SUGAR: он сохраняет простое правило для прямого прохода, но использует более гладкий искусственный градиент при обновлении модели. Этот трюк поддерживает поток градиентов даже при слабых входах, так что больше нейронов остаётся активными и может вносить вклад в обучение тонких дорожных особенностей.
Доказательства эффективности в реальных данных
Для проверки DS-Unet команда использовала две хорошо известные коллекции спутниковых изображений дорог из разных регионов и ландшафтов. Они разбили большие изображения на управляемые тайлы, применили реалистичные изменения яркости, цвета и ориентации, а затем обучали свою систему вместе с 17 ведущими методами выделения дорог и сегментации, включая как классические сверточные сети, так и более новые архитектуры на базе трансформеров. По всем ключевым показателям точности — насколько полно захвачена истинная дорожная площадь, как часто избегаются ложные дороги и насколько совпадают предсказанные и истинные дорожные карты — DS-Unet последовательно показывал лучшие результаты, оставаясь при этом достаточно быстрым для практического использования при масштабном картографировании.
Что это значит для лучших карт
Проще говоря, эта работа показывает, что обучение нейросети одновременно «очищать» фон от помех и понимать более широкую структуру сцены может дать более чистые и связанные дорожные карты из спутниковых снимков. В сочетании с более стабильным правилом обучения, которое поддерживает активное улучшение внутренних элементов модели, DS-Unet лучше выделяет узкие деревенские улицы, не принимает грунтовые тропы за настоящие дороги и связывает разрозненные фрагменты в согласованные сети по сравнению с существующими системами. По мере того как картографические агентства и технологические компании стремятся к полностью автоматизированным и часто обновляемым картам, подходы вроде DS-Unet могут сыграть ключевую роль в превращении сырой съёмки в точную и пригодную для использования дорожную информацию для повседневных задач.
Цитирование: Wang, J., Huang, Z., Ren, C. et al. Enhancing remote sensing road extraction via DS-Unet with complementary attention and surrogate gradients. Sci Rep 16, 9044 (2026). https://doi.org/10.1038/s41598-026-39811-x
Ключевые слова: дистанционное зондирование дорог, спутниковое картографирование, сегментация на основе глубокого обучения, сети с вниманием, анализ аэрофотоснимков