Clear Sky Science · ru
Ослабление помех измерений в модифицированном предикторе Смита и автоматических контроллерах смещения для системы интегратор с запаздыванием
Почему это важно для повседневных технологий
Многие устройства, на которые мы полагаемся — от химических заводов и энергосистем до автомобилей и небольших лабораторных установок — вынуждены реагировать на показания датчиков, которые приходят с задержкой и содержат шум. В этой статье задаётся простой, но важный вопрос: когда сигналы запаздывают и зашумлены, какой тип автоматического регулятора обеспечивает стабильность, точность и щадящее воздействие на оборудование? Авторы сравнивают популярный метод, основанный на предсказании, с более новой схемой, которая активно оценивает и компенсирует возмущения, и показывают, почему один из подходов значительно надёжнее в реальных, «грязных» условиях.
Задержки реакции и шумные датчики
Во многих процессах изменение входа (например, мощность нагревателя или положение клапана) не влияет на выход мгновенно. Существует внутренняя задержка, пока тепло распространяется, химикаты перемешиваются или механические части перемещаются. Инженеры часто описывают такие системы как «интегратор с запаздыванием»: выход накапливает эффект входа, но только после некоторой паузы. Одновременно датчики температуры, расхода или положения всегда содержат случайный шум. Следовательно, регулятор должен управлять системой, реагирование которой запаздывает и наблюдается через «дрожащую» измерительную линию. При некачественном управлении управляющее воздействие может сильно колебаться, изнашивать приводы и при этом не достигать требуемого значения.
Старый предиктор против нового устранителя смещения
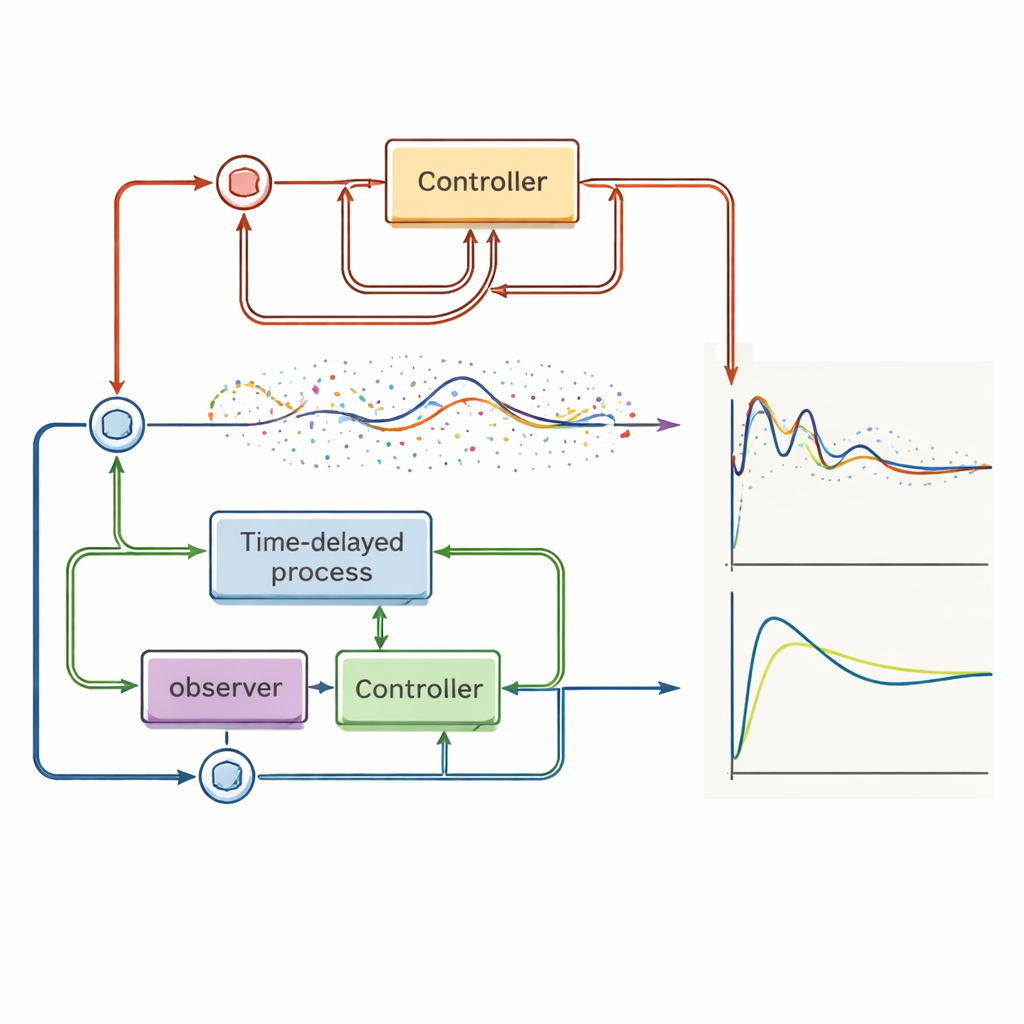
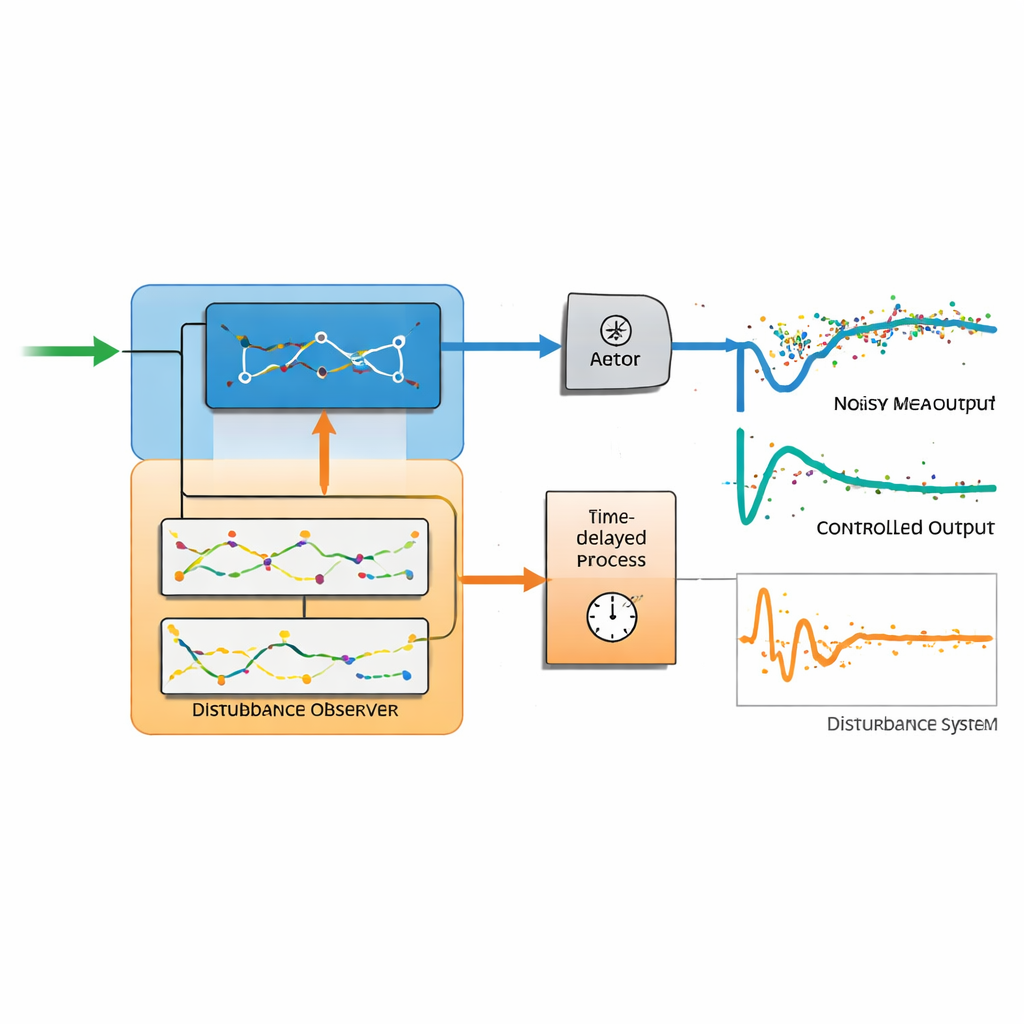
Классический предиктор Смита и его современная вариация — предиктор Åström–Smith — решают проблему задержки, создавая внутреннюю модель процесса и используя её для прогнозирования будущего выхода. В идеальных условиях это даёт быстрые, чёткие реакции. Конкурирующая схема, рассмотренная здесь и называемая автоматическим контроллером смещения, идёт другим путём. Она сочетает обычный стабилизирующий регулятор с наблюдателем возмущений — модулем, который восстанавливает скрытые возмущения, действующие на вход, и автоматически их компенсирует. Ключевая особенность в том, что этот наблюдатель использует полную внутреннюю модель запаздывающей системы вместе с тщательно подобранными низкочастотными фильтрами и, при необходимости, производными более высокого порядка по выходу. Такая структура позволяет настроить скорость восстановления возмущений, не нарушая свойств слежения системы за заданным значением.
Что происходит, когда шум реальный, а не идеальный
Когда авторы вводят реалистичный измерительный шум в моделях и экспериментах, разница между двумя подходами становится очевидной. Контроллер на базе предиктора, который опирается на несколько предельно устойчивых интеграторов, оказывается чрезвычайно чувствителен к шуму. Даже при уровнях шума порядка одного процента от сигнала управляющее усилие взрывается — в сотни и тысячи раз больше, чем в случае автоматического контроллера смещения — и сигнал на исполнительном устройстве начинает сильно дергаться. Ещё хуже, предиктор больше не гарантирует, что выход в конце концов совпадёт с заданным значением: появляются постоянные смещения и даже неустойчивость, особенно когда приводы достигают своих предельных значений. Напротив, автоматический контроллер смещения сохраняет плавные управляющие сигналы, эффективно подавляет постоянные возмущения и поддерживает выход близким к цели благодаря фильтрации и структуре оценки возмущений.
Практические испытания методов
Статья не ограничивается абстрактными моделями. Авторы применяют оба контроллера к неустойчивому химическому реактору, аппроксимированному простой моделью с доминирующим запаздыванием, и к реальной тепловой лабораторной установке с лампой, температурным датчиком и вентилятором охлаждения. В неустойчивом случае автоматический контроллер смещения по‑прежнему работает надёжно, хотя его настройку приходится смягчать, чтобы избежать перерегулирования, в то время как предикторная схема показывает растущие ошибки по мере усиления шума. На тепловом стенде автоматический контроллер смещения обеспечивает почти временно‑оптимальные отклики, которые бывают плавными как по температуре, так и по управляющему усилию, даже когда вентилятор вносит резкие возмущения. Контроллер на базе предиктора, напротив, демонстрирует заметные установившиеся ошибки и явное замедление, становится менее надёжным при наличии реального шума и ограничений приводов.
Что это значит для будущих регуляторов
С точки зрения неспециалиста вывод ясен: регулятор, который просто предсказывает будущее на основе идеализированной модели, может впечатлять на бумаге, но при появлении реального шума и ограничений вести себя плохо. Автоматический контроллер смещения с встроенным наблюдателем возмущений и тщательно отфильтрованной внутренней моделью оказывается более робастным, более точным и проще в настройке для широкого класса запаздывающих процессов. Авторы делают вывод, что модифицированный предиктор Смита всё ещё может быть полезен в нишевых ситуациях с низким уровнем шума, но дизайн на базе наблюдателя возмущений является более простым и надёжным выбором по умолчанию для современных систем управления, где датчики несовершенны и стабильность действительно важна.
Цитирование: Huba, M., Bistak, P. & Vrancic, D. Measurement noise attenuation in modified Smith predictor and automatic offset controllers for integrator plus dead-time system. Sci Rep 16, 8335 (2026). https://doi.org/10.1038/s41598-026-39732-9
Ключевые слова: управление с запаздыванием, наблюдатель возмущений, шум измерения, автоматический контроллер смещения, предиктор Смита