Clear Sky Science · ru
Последовательное предиктивное прямое управление скоростью PMSM
Более умное управление для повседневных электродвигателей
Электродвигатели тихо приводят в движение производственные линии, насосы, роботов и даже некоторые бытовые приборы. Повышение их эффективности и плавности работы экономит энергию, снижает шум и износ и повышает надежность. В этой статье рассматривается новый способ управления популярным типом двигателя, который позволяет ему быстро реагировать на изменения, не становясь нестабильным и не создавая чрезмерных электрических «помех». Авторы сосредоточены на стратегии, обещающей более простую настройку для инженеров при сохранении быстрого и точного регулирования скорости.
Почему современные схемы управления сложно настраивать
Синхронные двигатели с постоянными магнитами широко используются из‑за компактности, эффективности и способности точно поддерживать скорость. Традиционные схемы управления опираются на несколько вложенных контуров и набор регуляторов, которые инженерам приходится подбирать методом проб и ошибок. Новые подходы, основанные на предиктивном управлении, пытаются выбрать наилучшее действие для двигателя на доли секунды вперёд — это улучшает время реакции и позволяет одновременно учитывать несколько целей (например, точность по скорости и низкий потребляемый ток). Однако такие предиктивные регуляторы обычно сводят все цели в одно большое математическое выражение, зависящее от нескольких «весовых коэффициентов». Подбор этих коэффициентов печально известен своей сложностью: хороший выбор даёт отличную производительность, а плохой — может привести к вялой реакции или даже к нестабильности системы.
Пошаговый способ принятия решений
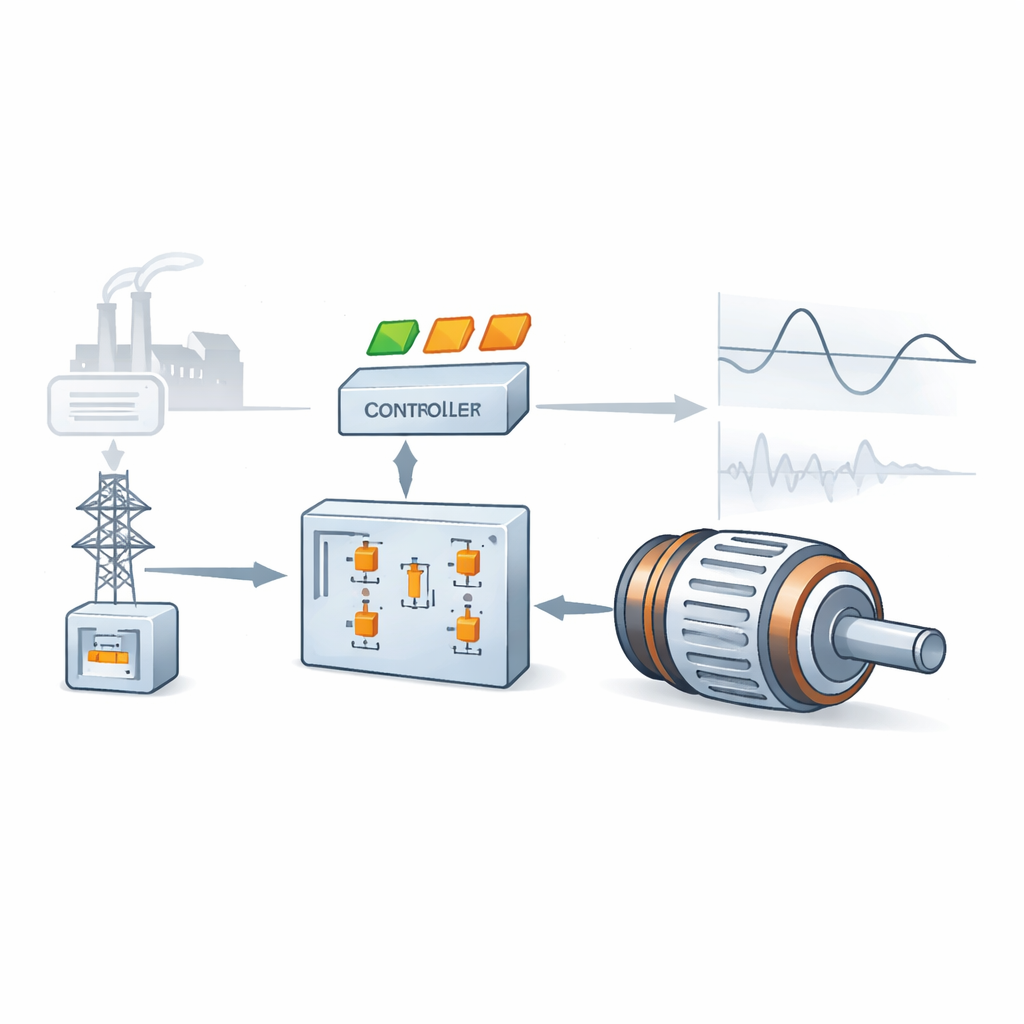
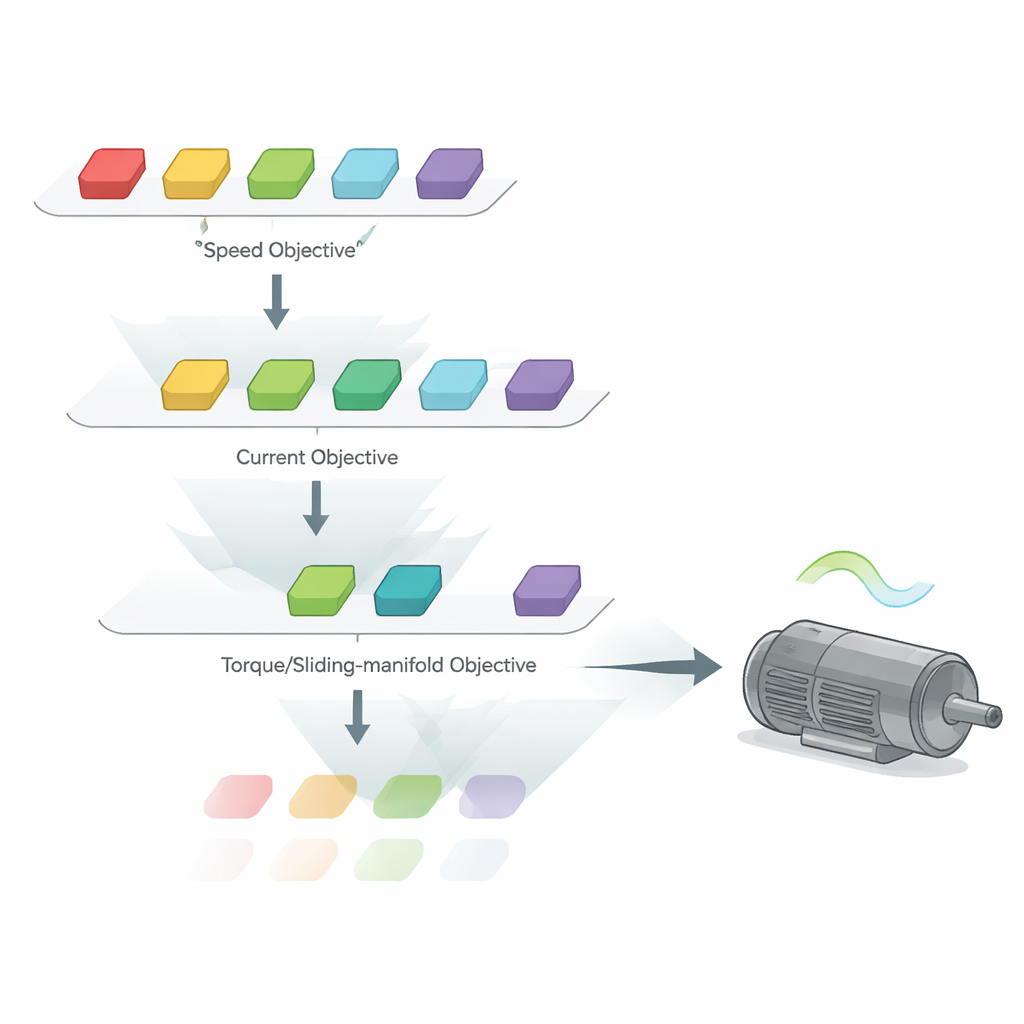
Вместо того чтобы упаковывать все цели в одну сложную формулу, авторы изучают «последовательный» подход. Контроллер здесь по‑прежнему прогнозирует поведение двигателя для каждого возможного положения переключателей в силовой электронике, но оценивает отдельные, более простые цели одна за другой. Сначала он отбрасывает варианты переключений, которые дали бы плохое поведение по скорости. Затем среди оставшихся вариантов сохраняются только те, которые эффективнее используют ток. Наконец, выбирается вариант, который лучше всего формирует момент двигателя, с использованием специального скользящего правила, связывающего ошибку по скорости и ошибку по моменту, чтобы скорость быстрее сходилась к требуемой. Поскольку каждый шаг фокусируется на одной цели, нет необходимости манипулировать несколькими весовыми коэффициентами; вместо этого контроллер использует логический процесс устранения. Сопровождающий наблюдатель оценивает неопределённый нагрузочный момент на валу, чтобы прогнозы оставались точными даже при возмущениях двигателя.
Улучшение устойчивости за счёт усиленной схемы
Когда авторы впервые протестировали этот последовательный метод, они обнаружили, что хотя он быстро реагирует на изменения скорости, он может становиться нестабильным и вызывать большие пульсации тока двигателя, особенно при попытках заставить его реагировать быстрее. Для исправления они предложили усовершенствованную версию, которая добавляет хитрый штрих к первому этапу принятия решения: она не только смотрит на предсказанную скорость, но и мягко штрафует определённые составляющие тока, масштабируя этот штраф в зависимости от запрошенной скорости. На низких скоростях контроллер уделяет больше внимания сглаживанию токов; на более высоких скоростях он допускает более решительные действия для поддержания производительности. Это изменение позволяет использовать более агрессивное скользящее правило по моменту без возникновения нестабильности. В подробных компьютерных моделированиях усовершенствованный метод сопоставим по времени набора с хорошо настроенным традиционным предиктивным регулятором и давал схожие уровни электрических искажений, при этом требуя меньше параметров настройки.
Испытания метода в лаборатории
Затем команда реализовала как исходный, так и усовершенствованный последовательные регуляторы на реальном приводе мощностью 1,1 кВт с использованием платформы быстрого прототипирования. Их сравнивали со стандартным предиктивным регулятором в реалистичных условиях, включая быстрые разгоны по скорости, внезапное подключение нагрузки и даже реверсы скорости. Исходный последовательный регулятор мог регулировать скорость, но демонстрировал периодическую потерю устойчивости и сильные пульсации тока, особенно на более высоких скоростях. В отличие от него, усовершенствованная версия работала устойчиво во всем протестированном диапазоне. Регулируя один ключевой параметр, формирующий скользящее правило, исследователи могли жертвовать между более точным отслеживанием скорости и более гладкими формами тока. Промежуточные настройки обеспечивали практичный баланс: ошибки по скорости были значительно уменьшены по сравнению с консервативными настройками, а рост искажений тока оставался приемлемым.
Что это означает для реальных приводов
Для неспециалистов основной вывод таков: авторы продемонстрировали более простой, но при этом мощный способ управления высокопроизводительными электродвигателями. Их усовершенствованная последовательная стратегия устраняет большую часть догадок при настройке традиционных предиктивных регуляторов, сохраняя при этом быструю реакцию на изменения скорости и возмущения. Метод не идеален — формы тока остаются несколько более шумными, чем хотелось бы, особенно в очень требовательных режимах — но он представляет собой важный шаг к более надёжным и простым в пусконаладке приводам. В дальнейших работах планируется снизить эти искажения тока и глубже проанализировать устойчивость, с целью сделать такой умный последовательный контроль пригодным для более крупных и строже регулируемых промышленных систем.
Цитирование: Pancurák, L., Horváth, K. & Kyslan, K. Sequential model predictive direct speed control of PMSM. Sci Rep 16, 8226 (2026). https://doi.org/10.1038/s41598-026-39256-2
Ключевые слова: синхронный двигатель с постоянными магнитами, модельно‑предиктивное управление, управление скоростью двигателя, последовательное управление, электроприводы силовой электроники