Clear Sky Science · ru
Исследование метода интеллектуального распознавания механических деталей с высокой похожестью признаков в условиях производственной среды
Почему важно распознавать похожие детали
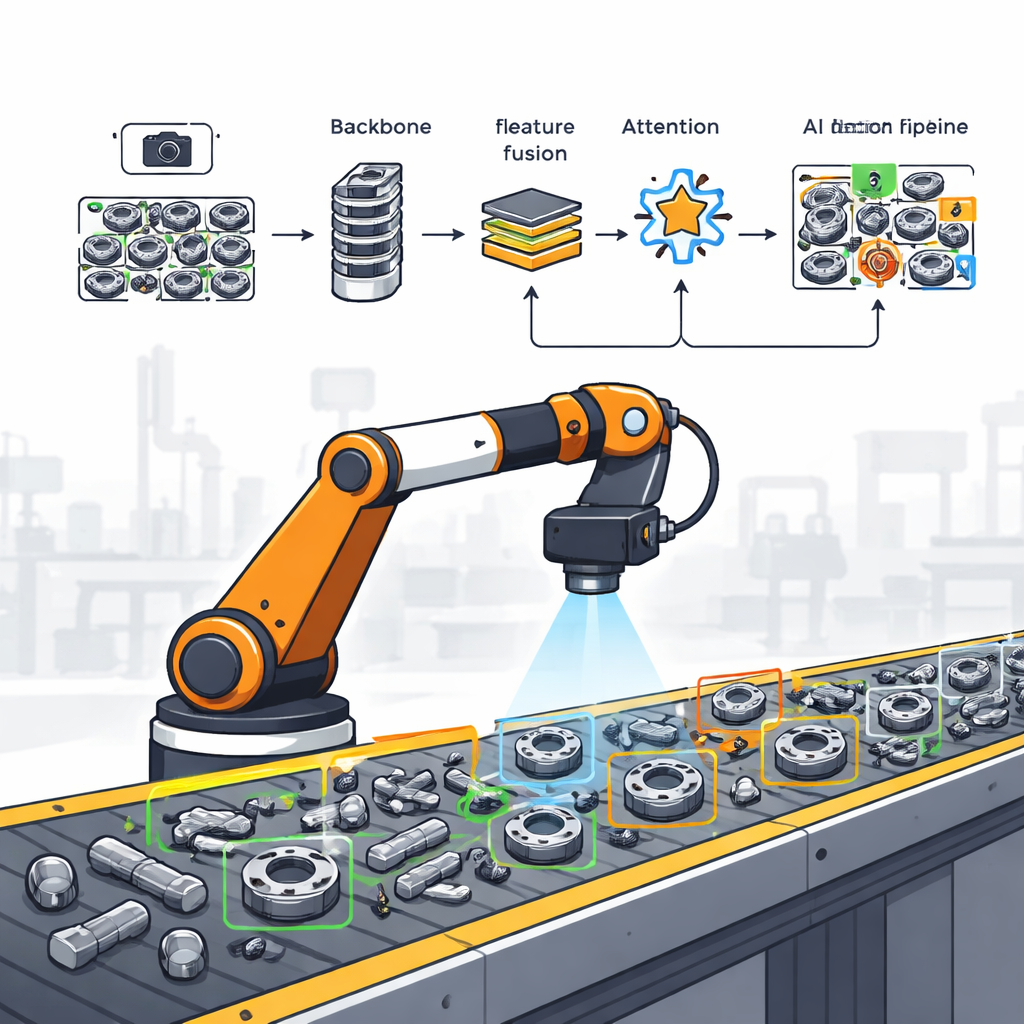
Современные заводы полагаются на роботов, которые находят, подбирают и собирают тысячи мелких металлических деталей. Многие из этих элементов — шестерни, подшипники, звездочки, гайки и винты — выглядят обманчиво похоже, особенно при жестком освещении или когда они перекрываются на конвейере. Если робот перепутает одну деталь с другой, это может привести к заеданиям, браку или даже повреждению оборудования. В этом исследовании рассматривается на первый взгляд простая, но с большими промышленными последствиями задача: как компактная и быстрая система компьютерного зрения может надежно отличать почти идентичные детали в реальных условиях цеха?
Сложности реального заводского зрения
На заводском полу камеры редко видят так же чисто, как в демонстрационных роликах. Освещение неравномерно, вызывая сильные блики на блестящем металле и глубокие тени в других участках. Детали сыплют в бункеры или раскидывают по лентам, часто частично закрывая друг друга. Более того, многие металлические компоненты имеют схожие формы, цвета и текстуры, оставляя очень мало очевидных визуальных подсказок. Традиционное программное обеспечение, сравнивающее шаблоны или использующее вручную разработанные признаки, сильно теряет в таких условиях: оно медленное, хрупкое при изменении освещения и часто не справляется, когда детали перекрываются или повёрнуты под неожиданными углами.
Опора на быстрые однокадровые детекторы
В последние годы семейство моделей искусственного интеллекта под названием YOLO («You Only Look Once») стало популярно для обнаружения объектов на изображениях за один быстрый проход. YOLOv8, одна из последних версий, уже хорошо балансирует точность и скорость и может работать в реальном времени. Однако когда разные детали выглядят почти одинаково, даже YOLOv8 может упускать тонкие отличия или строить неточные рамки. Ранние попытки уменьшить модели YOLO для маломощных устройств часто урезали параметры, но при этом ухудшали способность представлять тонкие детали — а как раз это и требуется для различения похожих механических деталей.
Более компактная, но более точная сеть обнаружения
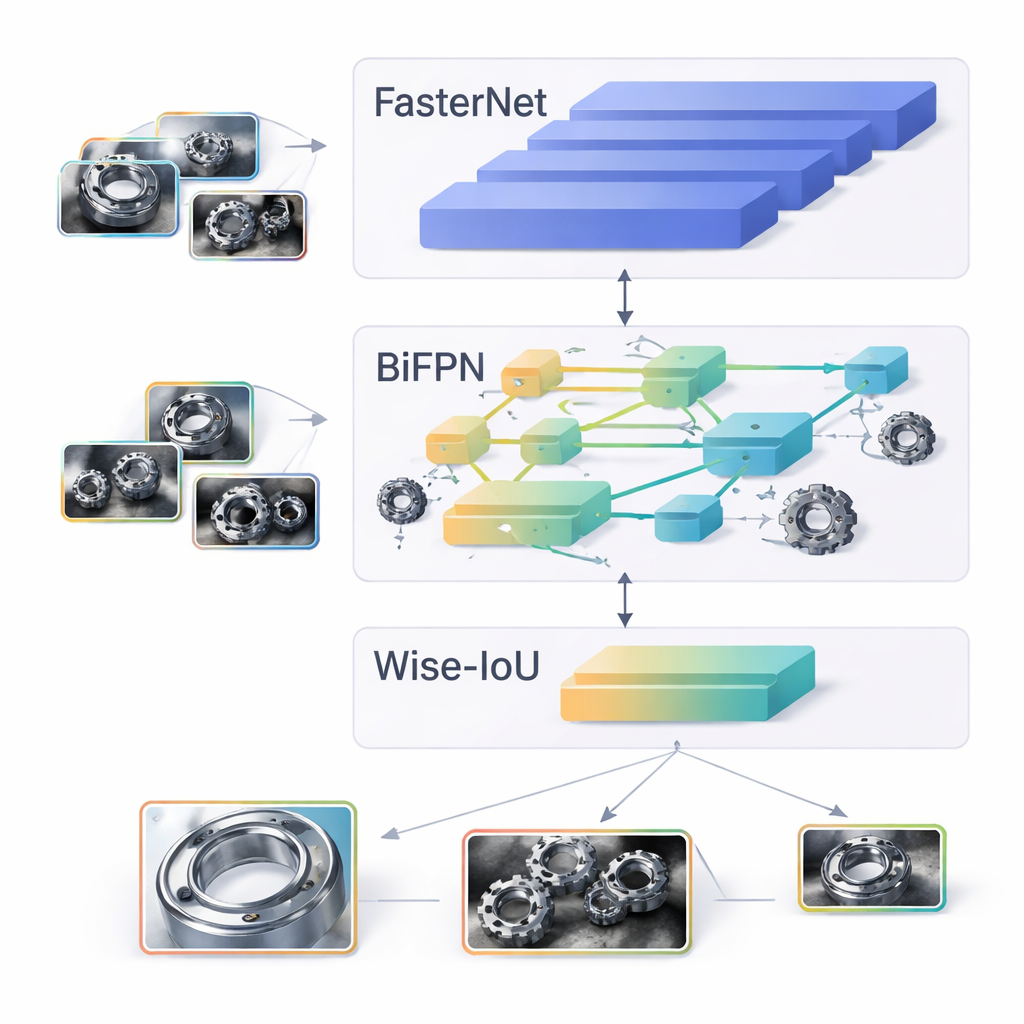
Авторы предлагают улучшенную версию самой маленькой модели YOLOv8, называемую YOLOv8n, специально адаптированную для запутанных промышленных деталей и аппаратуры с ограниченной вычислительной мощностью. Во-первых, они заменяют стандартное «ядро» сети на новую архитектуру под названием FasterNet, которая использует приём «частичных» свёрток, обрабатывающих только наиболее полезные области изображения на каждом шаге. Это снижает повторную работу с памятью, не теряя ключевой визуальной информации. Во-вторых, они перерабатывают среднюю «шею» сети, применив двунаправленную пирамиду признаков (BiFPN), что позволяет информации течь как от грубых глобальных представлений к мелким деталям, так и обратно — от мелких деталей к более крупному контексту, благодаря чему небольшие, частично закрытые детали получают контекст, и наоборот.
Обучение сети игнорировать плохие подсказки
Помимо архитектуры сети, то, как она учится корректировать свои внутренние параметры — управляемое функцией потерь — сильно влияет на то, чему она уделяет внимание. Стандартные методы обучения относятся к всем примерам более-менее одинаково, из-за чего примеры низкого качества (плохо выровненные или неоднозначные рамки) могут ввести модель в заблуждение. Авторы заменяют обычное правило сопоставления рамок методом под названием Wise‑IoU. Проще говоря, этот подход оценивает каждый тренировочный пример не только по перекрытию, но и по тому, насколько он является «выбросом», и затем тихо снижает влияние ненадёжных примеров. Со временем система учится главным образом на чётких, хорошо размеченных примерах, что приводит к более плотным и надёжным детекционным рамкам, особенно когда детали перекрываются или видны при сложном освещении.
Проверка системы на практике
Для оценки своей конструкции команда собрала собственную коллекцию изображений шести распространённых механических деталей, каждая была снята 1250 раз при разных уровнях освещённости и с различной степенью взаимного перекрытия. Они сравнили улучшенную модель со стандартной YOLOv8n и несколькими другими облегчёнными детекторами. Новая система достигла более высокого общего качества обнаружения, потребляя менее двух третей вычислений и сократив число параметров примерно на 42%. В частности, она подняла ключевой показатель mean average precision на обычно используемом пороге на 1,5 процентных пункта, при этом оставаясь достаточно эффективной для работы в реальном времени на скромном оборудовании.
Что это значит для умных фабрик
Проще говоря, исследование показывает, что заводские роботы могут стать одновременно умнее и экономичнее. Благодаря переработанному ядру сети, более разумной слиянию признаков и более избирательному правилу обучения небольшая модель ИИ может надёжнее различать похожие шестерни, подшипники и другие детали в грязных, реальных сценах, даже при слабом освещении и перекрытиях. Это сочетание повышенной точности и меньшей вычислительной нагрузки облегчает развёртывание надёжного зрения на дешёвых периферийных устройствах, открывая путь к более гибким, полностью автоматизированным линиям производства без необходимости в массивных серверах или идеально контролируемой среде.
Цитирование: Lu, C., Ye, X., Wu, J. et al. Research on intelligent recognition method of mechanical parts with high feature similarity in industrial field environment. Sci Rep 16, 7640 (2026). https://doi.org/10.1038/s41598-026-39036-y
Ключевые слова: обнаружение промышленных объектов, механические детали, облегчённое глубокое обучение, YOLOv8, автоматизация заводов