Clear Sky Science · ru
Стратегия восстановления траекторных данных транспортных средств для видеораспознавания на основе двухэтапного метода интерполяционно-фильтрационной обработки
Почему важно очищать цифровые дорожные данные
Каждый раз, когда дорожная камера фиксирует движение автомобилей на перекрестке, она создаёт скрытый поток данных о том, куда едет каждое транспортное средство, с какой скоростью и как меняется его ускорение. Эта информация ценна для повышения безопасности дорог, оптимизации работы светофоров и развития автономных автомобилей. Но в реальности данные бывают шумными: машины скрываются за грузовиками, фары бликуют в дождь, а системы компьютерного зрения ошибаются. В исследовании рассматривается практический вопрос: как преобразовать такие испорченные видеоданные в надёжную запись реальных движений транспортных средств?
Когда камеры неверно читают движение
Видеотрекинг привлекателен из‑за невысокой стоимости, ненавязчивости и охвата больших территорий. Тем не менее сырые результаты содержат две основные проблемы. Первая — явные ошибки, например когда автомобиль «прыгает» назад, мгновенно останавливается с шоссейной скорости или демонстрирует невозможные всплески ускорения. Обычно это связано с окклюзией, смазыванием из‑за движения или кратковременной потерей слежения. Вторая проблема — случайный дребезг: небольшие быстрые колебания в указанной позиции. При вычислении скоростей и ускорений эти колебания усиливаются, заставляя нормальное вождение выглядеть хаотичным. Если их не исправлять, такие искажения могут исказить модели движения более чем на 40 %, что вводит в заблуждение исследования безопасности и системы автономного вождения.
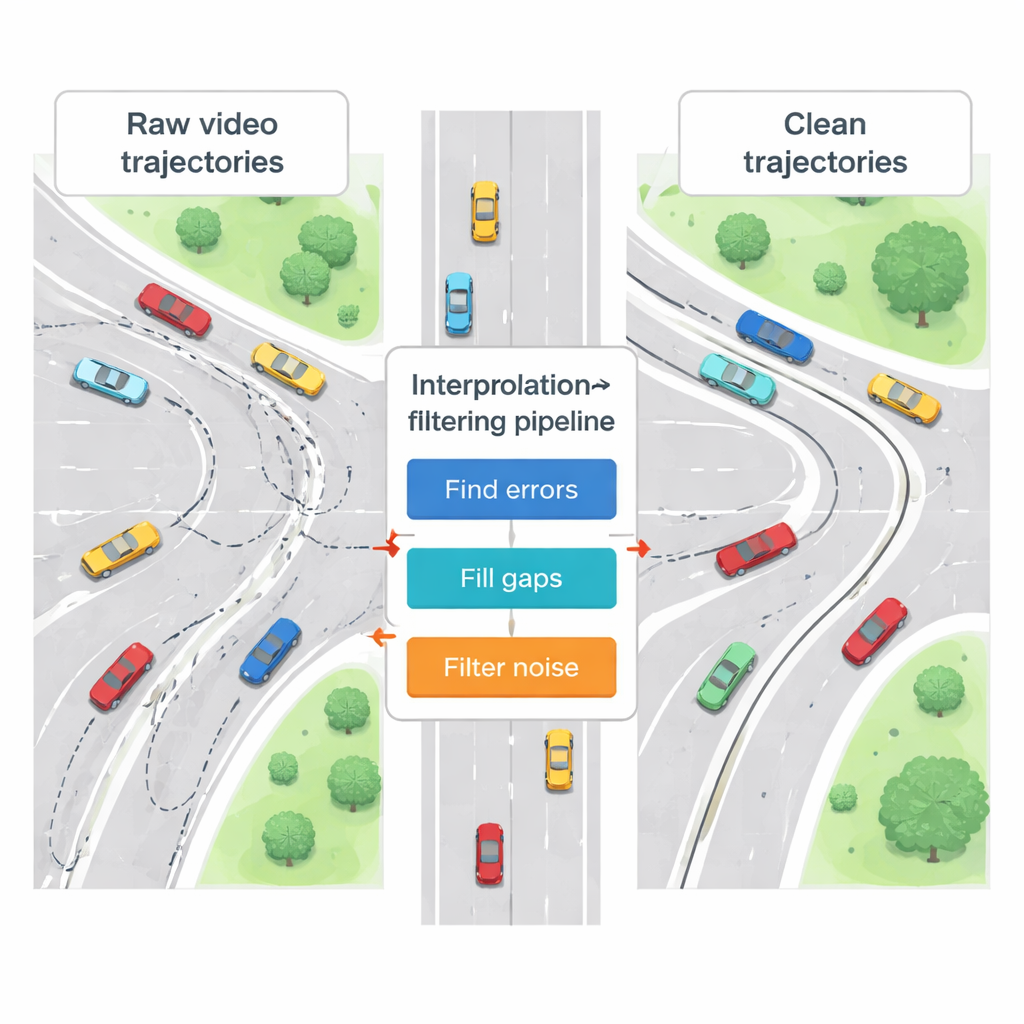
Двухэтапный план очистки
Чтобы устранить эти дефекты, авторы предлагают двухэтапную стратегию восстановления, работающую как аккуратный цифровой механик. Первый этап нацелен на явные ошибки: он сканирует запись каждого автомобиля в поисках скоростей и ускорений, нарушающих простые физические ограничения, например экстремально высоких скачков рывка (очень резкие изменения ускорения) или значений ускорения, недоступных реальному автомобилю и водителю. Обнаруженные выбросы заменяются с помощью интерполяции — математических методов, которые оценивают пропущенные значения по соседним, более надёжным точкам. В работе сравниваются разные варианты интерполяции и показано, что интерполяция Эрмита лучше сохраняет естественную форму траектории по сравнению с классическим методом Лагранжа, особенно при сложном движении.
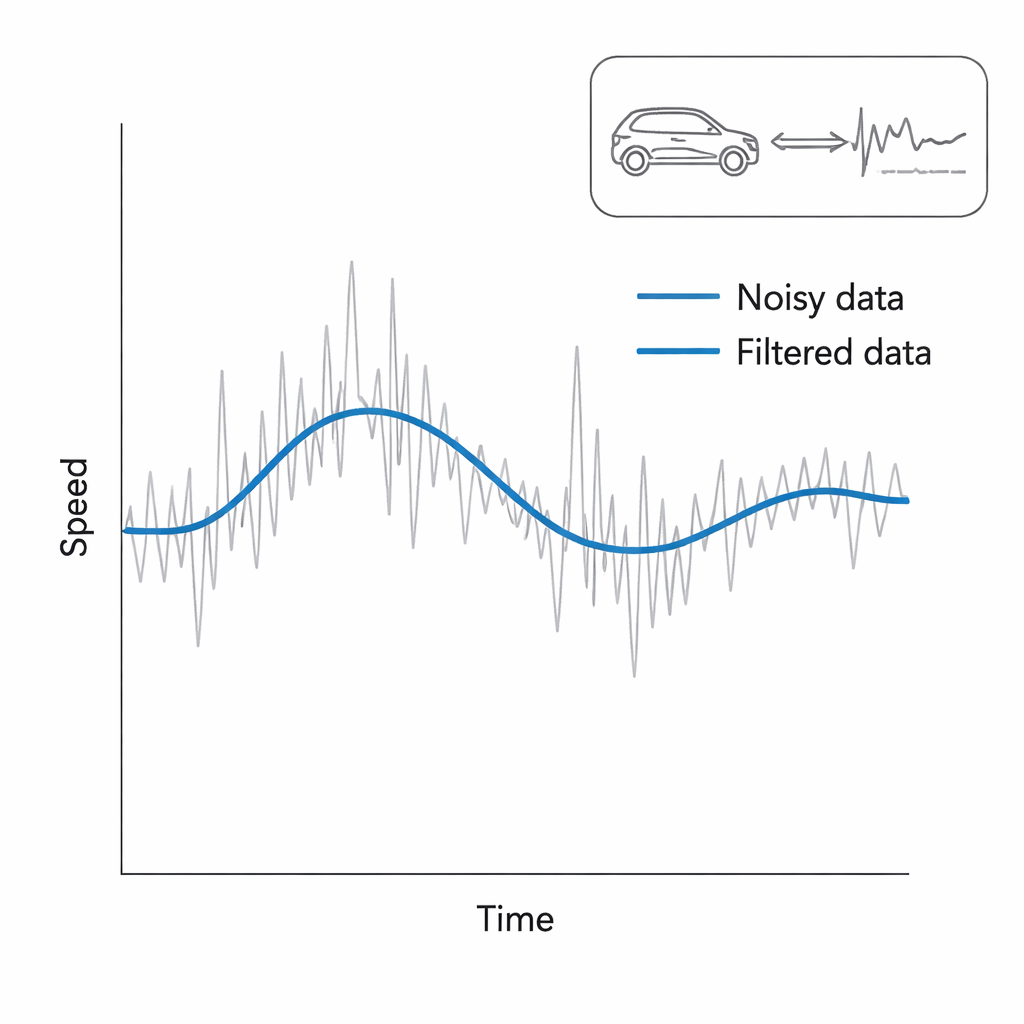
Сглаживание цифровой поездки
Второй этап решает более тонкую проблему шума. Даже после исправления грубых ошибок оставшиеся следы могут выглядеть слегка дрожащими. Здесь исследователи тестируют два способа сглаживания: усовершенствованный метод скользящего среднего с большим весом для недавних точек и статистический подход, известный как фильтр Калмана, который постоянно обновляет наилучшее приближение истинной позиции и скорости автомобиля по мере поступления новых измерений. Оба метода подавляют дребезг, но фильтр Калмана лучше отслеживает реальные изменения в поведении — например плавное торможение или перестроение — не размывая их. В результате получается более гладкое и реалистичное описание того, как каждое транспортное средство в действительности вело себя во времени.
Тестирование метода
Команда применяет свою методику к реальным видеозаписям, снятым на оживлённом городском перекрёстке в Чжэнчжоу, Китай, используя современные алгоритмы обнаружения объектов и трекинга для извлечения траекторий. Затем десятки разных следов транспортных средств прогоняются через двухэтапный процесс, успех оценивают простыми физическими метриками: насколько сильно колеблется ускорение и как часто рывок превышает уровень, считающийся нереалистичным для легкового автомобиля. Очищенные траектории также сравнивают с эталонными данными, полученными непосредственно с приборной панели автомобиля. Для различных сценариев движения — равномерное движение, резкое торможение, перестроения — комбинированная стратегия интерполяции и фильтрации сокращает вариативность ускорения примерно на 85 % и почти устраняет неправдоподобные всплески рывка, при этом лучше совпадает с данными приборов, чем несколько альтернативных методов.
Что это значит для повседневных поездок
Проще говоря, статья показывает, как превратить несовершенные записи обычных дорожных камер в данные, которым инженеры и автономные системы действительно смогут доверять. Сначала устраняя очевидные сбои, а затем аккуратно сглаживая шум, предложенный метод даёт реалистичные цифровые следы движения без требований к экзотическому оборудованию или чрезмерным вычислительным ресурсам. Эти более чистые данные могут помочь в оптимизации работы светофоров, создании более точных симуляций пробок и повышении безопасности алгоритмов автономного вождения, зависящих от понимания реального поведения на дороге. Хотя исследование ограничено одним городом и не охватывает все погодные и дорожные условия, оно прокладывает понятный и практичный путь к использованию существующих видеоcетей в качестве надёжных сенсоров для следующего поколения интеллектуальных транспортных систем.
Цитирование: Ding, S., Zhang, S., Peng, F. et al. Reconstruction strategy of vehicle trajectory data for video recognition based on a two-step method of interpolation filtering. Sci Rep 16, 7428 (2026). https://doi.org/10.1038/s41598-026-38947-0
Ключевые слова: траектория транспортного средства, видеоданные движения, очистка данных, интеллектуальный транспорт, автономное вождение