Clear Sky Science · ru
Адаптивное нейронное управление квадрокоптером на основе ESO против ветра и возмущений от полезной нагрузки
Как удерживать дроны стабильными в сумбурном реальном мире
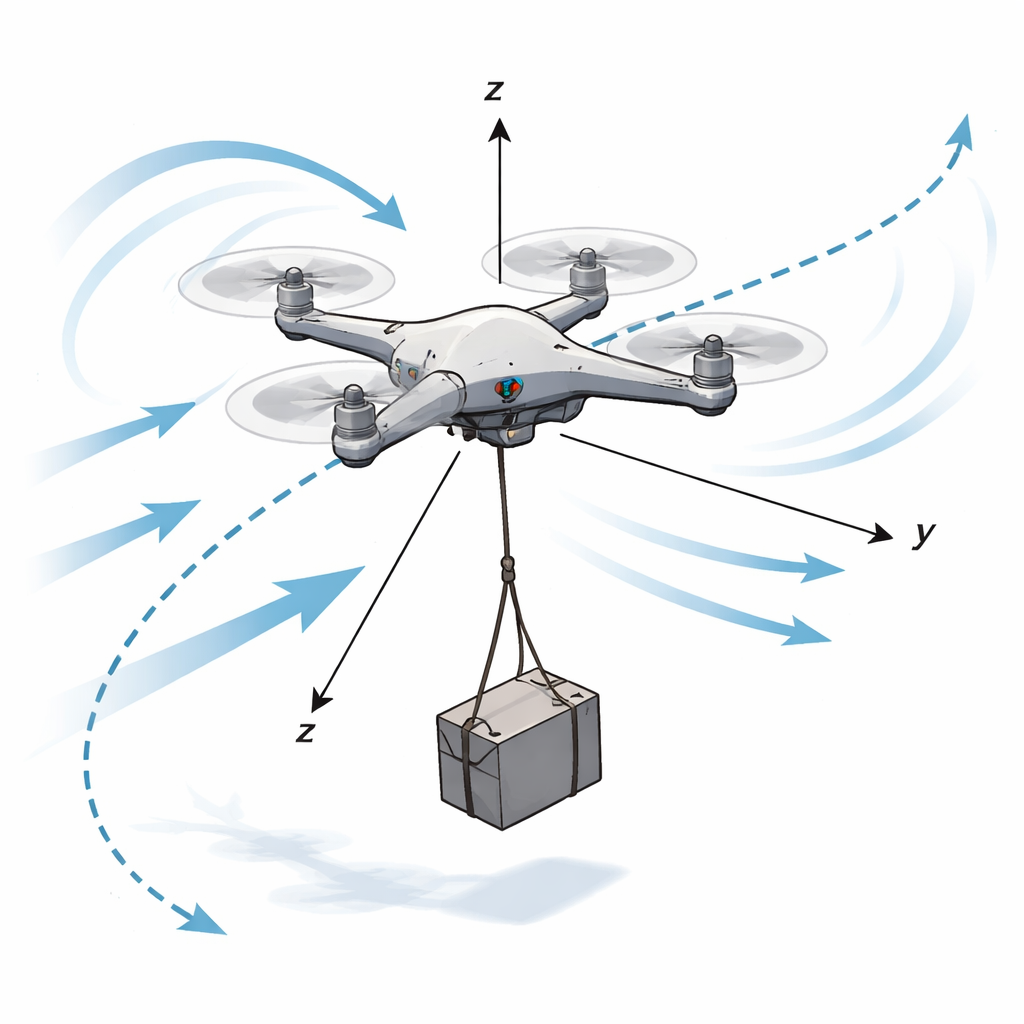
Небольшие четырехроторные дроны всё чаще применяются для инспекций мостов, мониторинга посевов или доставки мелких грузов. Но в реальных условиях эти летающие аппараты сталкиваются с порывами ветра и качающимися подвесами, которые легко сбивают их с курса. В статье представлен новый подход, позволяющий сохранять плавное следование по заданной траектории даже при турбулентном воздухе и при том, что колеблющаяся полезная нагрузка тянет аппарат в сторону.
Почему ветер и подвешенные грузы так проблематичны
Квадрокоптер по своей природе трудноуправляем: он легкий, быстро реагирует на малые изменения мощности двигателей, а движения по разным осям взаимосвязаны. При сильных или быстро меняющихся порывах ветра на аппарат действуют непредсказуемые силы. Добавление подвешенной на трос полезной нагрузки — например, камеры или бутылки с жидкостью — усугубляет ситуацию: груз может раскачиваться как маятник и передавать дополнительные силы обратно на дрон. Традиционные регуляторы, такие как широко используемые PID, а также более сложные схемы на основе скользящего режима или backstepping, хорошо работают только при хорошем знании физической модели и при небольших возмущениях. Если модель неточна или ветровые и подвесные силы меняются сложно, такие методы могут давать вялую реакцию, перерегулирование или заметные колебания в полёте.
Умный надсмотрщик для скрытых возмущений
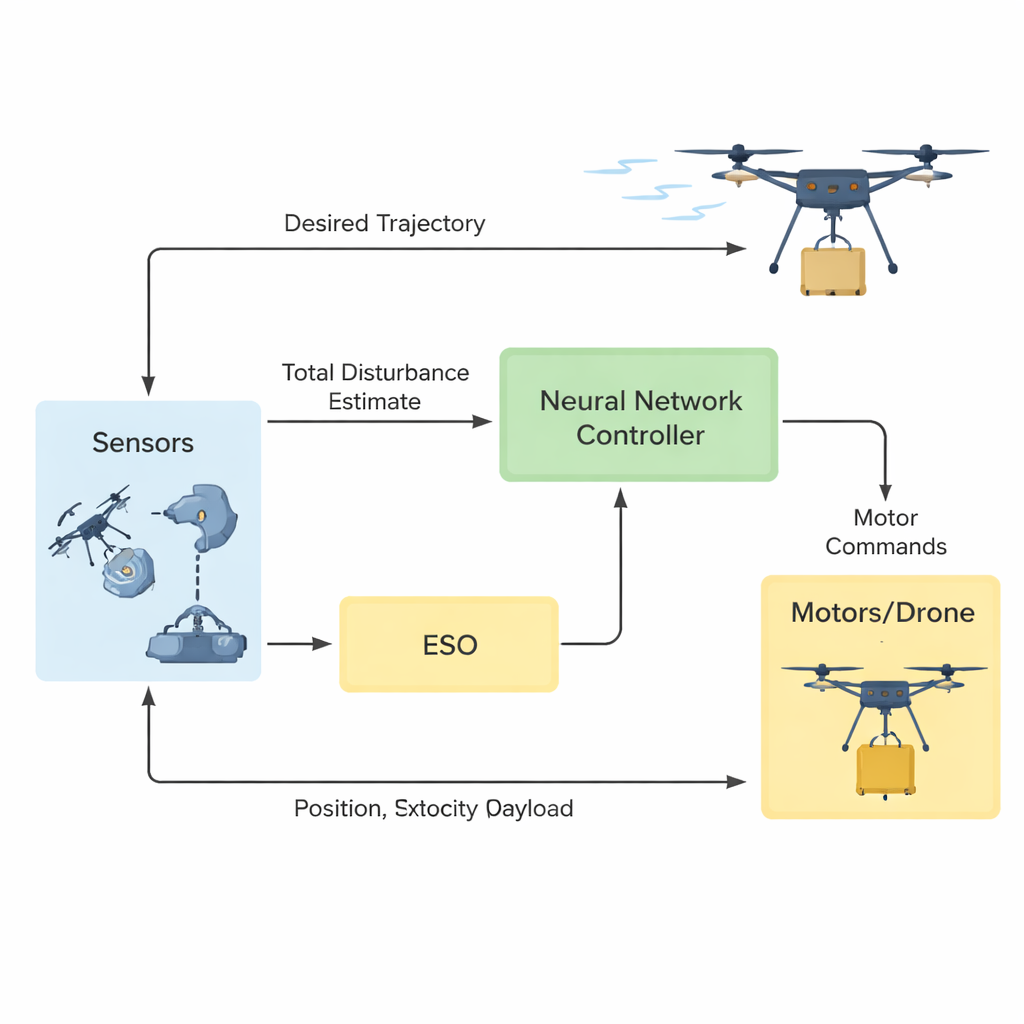
Чтобы справиться с этим, авторы опираются на концепцию активного подавления возмущений. Вместо того чтобы моделировать каждую деталь ветра и раскачивания груза, они объединяют все неизвестные влияния в одно «свёрнутое» (lumped) возмущение. Специально сконструированный расширенный наблюдатель состояния (extended state observer, ESO) функционирует как математический надсмотрщик, постоянно оценивая это суммарное возмущение по движению дрона. Важно, что их наблюдатель имеет всего один основной параметр настройки, что значительно упрощает запуск по сравнению со многими существующими реализациями. Теория показывает, что при правильной настройке оценка наблюдателя быстро сходится и остаётся строго ограниченной — то есть её можно использовать как реальное упреждающее (feedforward) исправление, а не просто грубую догадку.
Даем нейросети выучить сложные связи
Даже при хороших оценках возмущений контроллеру по-прежнему нужно знать, как команды двигателей превращаются в реальные движения — зависимость, от которой зависят масса, геометрия и другие физические параметры, способные меняться со временем. Вместо того чтобы полагаться на тщательно идентифицированную модель, авторы вводят радиально-базисную нейронную сеть, которая учится этой зависимости непосредственно по данным полёта. Контроллеру требуется лишь знать текущее положение дрона, желаемую точку и вторую производную желаемой траектории (ускорение целевой точки). Адаптивный закон непрерывно обновляет внутренние веса сети, уменьшая ошибку слежения. С помощью анализа на основе функции Ляпунова авторы доказывают, что в такой адаптивной схеме ошибки слежения остаются равномерно ограниченными и могут быть сделаны сколь угодно малыми, при этом обновления весов остаются устойчивыми.
Проверка метода на практике
Команда подтверждает работоспособность подхода как в численных моделированиях, так и в реальных экспериментах. В симуляциях дрону поручают следовать сложным трёхмерным спиральным траекториям, одновременно подвергая его случайным порывам ветра и изменяющимся во времени усилиям от полезной нагрузки. Новый контроллер сравнивают с тремя другими продвинутыми методами: линейным активным подавлением возмущений, управлением в режиме скольжения, моделем-несвязанным терминальным управлением в режиме скольжения и в более жёстком испытании — адаптивным дробным порядком управления. Во множестве сценариев предложенный метод обеспечивает более плавные траектории и меньшие среднеквадратичные ошибки положения, особенно после появления возмущений. В физических испытаниях исследователи летали квадрокоптером в помещении при обдуве двумя промышленными вентиляторами, а под аппаратом висела бутылка воды массой 200 г. Системы захвата движения фиксировали положение дрона. Даже при постоянном ветре и ручных подтяжках груза дрон удерживал целевую точку в пределах нескольких сантиметров, а команды моторам оставались корректными, что указывает на практическую применимость метода для реального оборудования.
Что это значит для повседневного использования дронов
Для неспециалиста ключевая мысль такова: работа предлагает способ сделать дроны более надёжными в жёстких условиях без необходимости идеального знания их внутренней физики. Комбинируя простой, но мощный наблюдатель возмущений с обучающимся контроллером, система может адаптироваться на лету к порывам ветра и раскачивающимся грузам, удерживая аппарат на курсе при минимальной настройке. Такой робастный и мало зависящий от модели подход может упростить использование дронов для рутинных задач в городах, на фермах и на заводах; те же идеи со временем могут быть распространены на группы дронов и на отказоустойчивые конструкции, которые продолжают безопасно летать даже при выходе из строя отдельных компонентов.
Цитирование: Cai, X., Dai, J., Liu, F. et al. ESO based adaptive neural network control for a quadrotor against wind and payload disturbances. Sci Rep 16, 7758 (2026). https://doi.org/10.1038/s41598-026-38931-8
Ключевые слова: управление квадрокоптером, стабильность дрона, возмущение ветром, нейронный контроллер, отслеживание полезной нагрузки