Clear Sky Science · ru
Преобразование PCA whitening повышает устойчивость к освещению при визуальном распознании мест по Фурье-подписям
Роботы, находящие дорогу в помещениях
Представьте робота, который перемещается по дому или офису: в один день в помещении ярко светит солнце, в другой — остаются лишь тусклые лампы. Чтобы понимать, где он находится, робот сравнивает текущий вид с ранее сохранёнными изображениями. При резких изменениях освещения места могут выглядеть практически неузнаваемыми. В этой статье рассматривается нетривиальный математический подход для распознавания мест по панорамным изображениям и показано, как статистический приём, называемый PCA whitening, делает этот метод гораздо более устойчивым к изменениям освещения.
Видеть мир волнами, а не пикселями
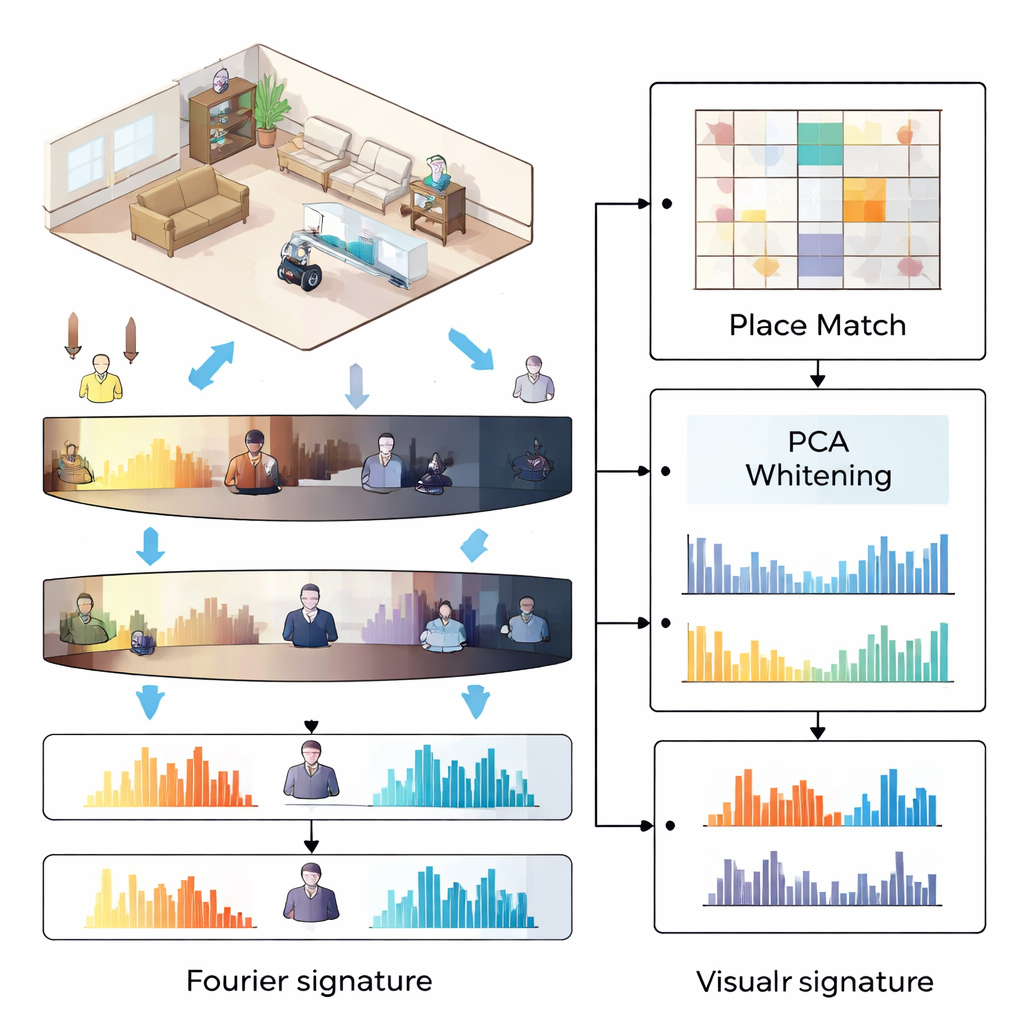
Большинство современных систем визуального распознавания мест опираются на множество мелких деталей изображения — грани, углы и текстуры — а затем сводят их в компактный «отпечаток». Напротив, в этой работе используются Фурье-подписи: панорамное изображение рассматривается не как сетка пикселей, а как смесь волн разных частот. Камера захватывает обзор на 360 градусов; панорама делится на горизонтальные полосы, и каждая полоса преобразуется в одномерный частотный спектр. Сохраняются только амплитуды самых низких частот, которые укладываются в дескриптор. Поскольку метод отбрасывает информацию о положении признаков вдоль окружности, дескриптор почти не меняется при повороте робота, что делает его естественно устойчивым к вращению.
Почему освещение ломает простые подписи
Хотя Фурье-подписи компактны и быстро вычисляются, они по-прежнему испытывают трудности при значительных изменениях освещения между съёмками одного и того же места. В естественных изображениях в низких частотах обычно сосредоточено гораздо больше энергии, чем в высоких, и эта дисбалансировка зависит от освещения. В результате некоторые части дескриптора доминируют при вычислении сходства, а многие элементы сильно коррелированы между собой, потому что соседние строки панорамы выглядят похоже. Без коррекции решение системы о том, показывают ли два изображения одно и то же место, определяется небольшим, избыточным подмножеством значений, что делает систему хрупкой при разных условиях освещения.
Очистка сигнала с помощью PCA whitening
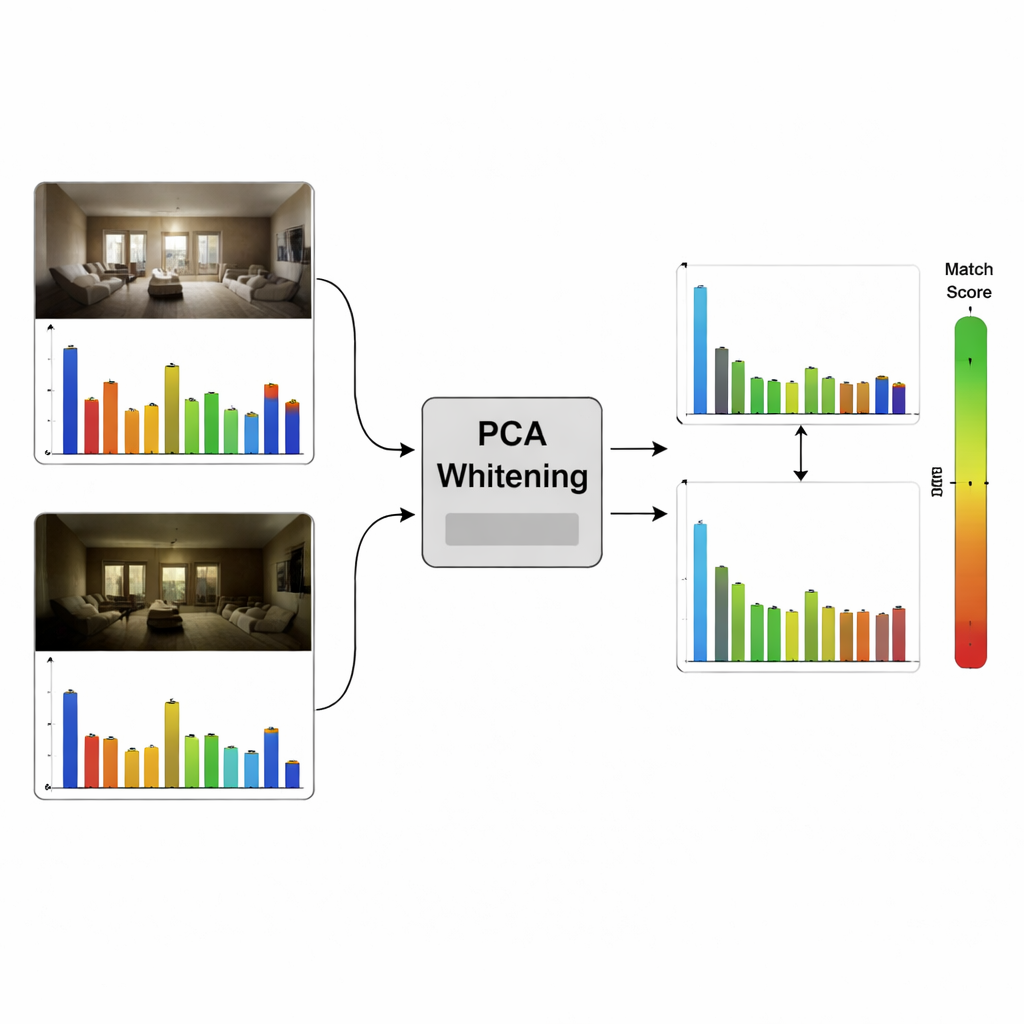
Автор предлагает добавить PCA whitening как этап постобработки Фурье-дескрипторов. На наборе учебных панорам из семи внутренних помещений система изучает, как элементы дескриптора обычно варьируются и коррелируют. PCA whitening затем центрирует дескриптор, поворачивает его в направления независимых вариаций и перерассчитывает масштаб по каждому направлению так, чтобы все они имели равное влияние. Это устраняет избыточные корреляции и выравнивает вклад разных частот. Поскольку преобразованные элементы упорядочены по значимости, дескриптор можно безопасно укоротить, просто отрезав хвост. Эксперименты на трёх невиданных ранее средах с множеством вариантов освещения показывают, что whitening последовательно повышает вероятность того, что правильное место окажется среди верхних найденных кандидатов, особенно в практично важном случае, когда возвращается лишь небольшой список возможных совпадений.
Лёгкий, но сопоставимый с глубоким обучением
Чтобы оценить, как этот упрощённый подход сопоставим с текущими трендами, статья сравнивает его с AnyLoc — недавним методом визуального распознавания мест на основе очень большой трансформерной сети. AnyLoc тоже использует PCA-основанную компрессию, но стартует с высокоразмерных признаков, сгенерированных глубокими нейросетями. На панорамном наборе данных для помещений, после применения whitening, Фурье-подписи сопоставимы или даже превосходят AnyLoc, когда системе разрешено предлагать до примерно десяти кандидатов, что является реалистичной рабочей точкой для многих роботов. Важно, что метод на основе Фурье значительно дешевле в исполнении: он опирается на быстрые алгоритмы Фурье-преобразований и простые матричные операции на CPU, тогда как AnyLoc требует мощного GPU и значительно больше времени на изображение.
Что это значит для повседневных роботов
Главная мысль для непрофессионального читателя состоит в том, что умелое применение классической математики всё ещё может соперничать с тяжёлой искусственной интеллектуальной техникой в определённых задачах. Преобразуя панорамные изображения в сбалансированные, декоррелированные дескрипторы, PCA whitening делает простой частотный метод распознавания мест гораздо более устойчивым к изменениям освещения. Роботы, использующие этот подход, смогут надёжно локализовать себя в домах и офисах при широком диапазоне условий освещения, при этом требуя умеренных вычислительных ресурсов. Это делает надёжную визуальную навигацию более доступной для небольших и дешёвых роботов, которые однажды могут делить с нами повседневное пространство.
Цитирование: Offermann, L. PCA whitening improves the illumination tolerance for visual place recognition with Fourier signatures. Sci Rep 16, 6148 (2026). https://doi.org/10.1038/s41598-026-38929-2
Ключевые слова: визуальное распознавание мест, мобильные роботы, панорамная съемка, Фурье-подписи, PCA whitening