Clear Sky Science · ru
Улучшенный метод «чистого преследования» с динамическим управлением рулевым для автономных мобильных роботов и применение к безопасной навигации на химических заводах
Роботы, которые остаются на курсе
Когда роботы выходят из чистых цехов на поля и на химические заводы, им нужно следовать узким маршрутам с высокой точностью. Небольшое колебание может раздавить урожай, столкнуться с трубами или загнать машину в зону с горючими газами. В этой статье описан новый способ рулевого управления и регулирования скорости для колесных роботов, который помогает им оставаться близко к запланированному пути как на открытых пространствах, так и в стеснённых промышленных условиях.
Почему управление роботом сложно
Многие современные автономные мобильные роботы используют простое правило, называемое «чистым преследованием» (pure pursuit), чтобы следовать по маршруту. Робот смотрит на небольшое расстояние вперед по траектории, нацеливается на эту точку и повторяет процесс быстро. На практике инженерам приходится выбирать, насколько далеко «смотреть» роботу и с какой скоростью двигаться. Если расстояние просмотра слишком короткое, робот реагирует нервно и может вилять из стороны в сторону. Если оно слишком длинное, реакция затягивается и робот начнёт срезать повороты, особенно на крутых изгибах или при больших скоростях. Снаружи возникает ещё одна сложность: позиция робота оценивается сочетанием спутниковых сигналов, инерционных датчиков и данных с энкодеров колёс, у каждого из которых есть свои погрешности и задержки.
Более умный способ рулевого и скоростного управления
Авторы предлагают усовершенствованный метод, названный Pure Pursuit с динамическим управлением рулевым (PP-DSC). Вместо того чтобы держать расстояние просмотра и скорость фиксированными, робот регулирует оба параметра в реальном времени в зависимости от того, насколько острый поворот. Когда угол руления мал и путь почти прямой, робот использует более дальнее расстояние просмотра и большую скорость для плавного и эффективного движения. По мере увеличения угла руления на поворотах расстояние просмотра уменьшается, а скорость автоматически падает, давая роботу больше времени на реакцию и снижая боковое соскальзывание. Это поведение реализовано на четырёхколёсном автомобиле-подобном роботе, который использует современный программный фреймворк для робототехники вместе с высокоточной спутниковой навигацией, инерциальным датчиком и энкодерами колёс для оценки движения.

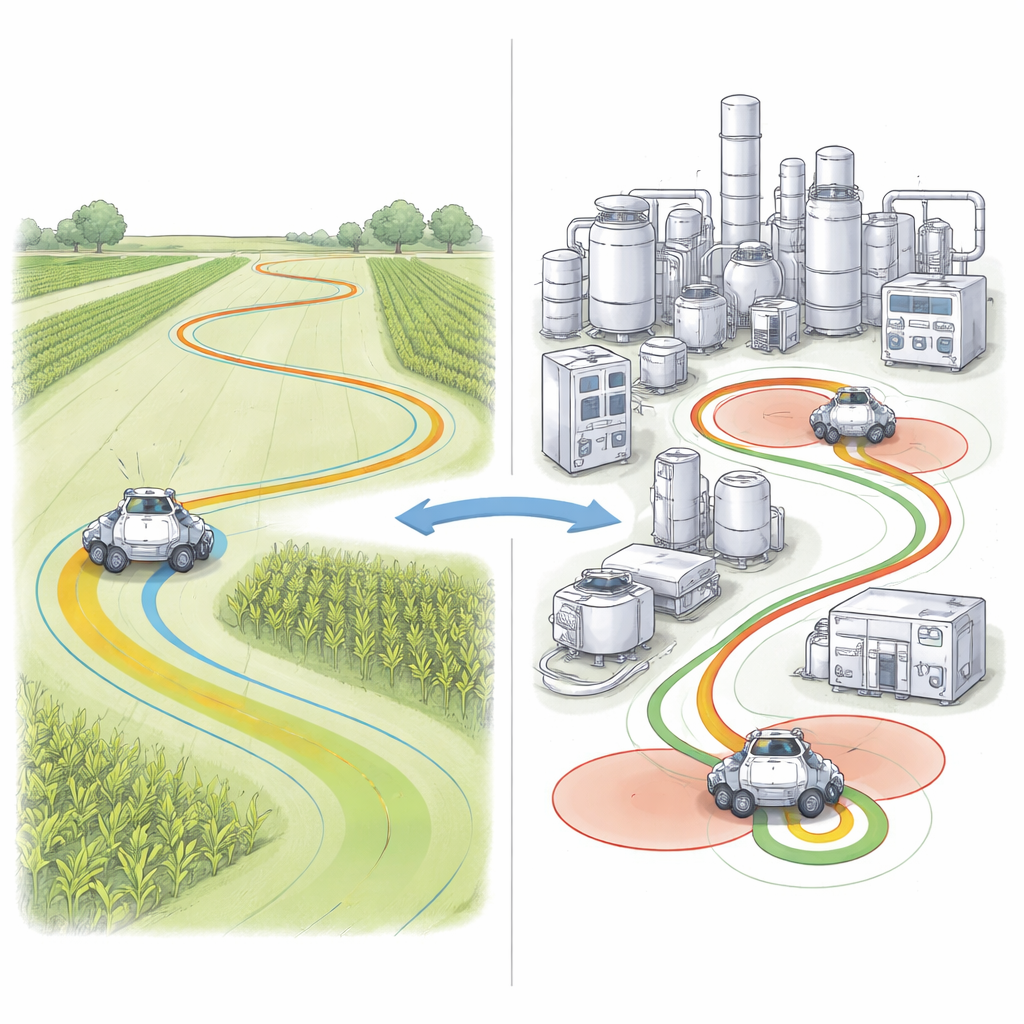
Испытания в полях и виртуальных химических заводах
Чтобы проверить эффективность PP-DSC, команда провела полевые эксперименты на трёх базовых маршрутах: прямая линия, замкнутый контур и «восьмёрка», на скоростях от 1 до 5 метров в секунду. Они сравнили новый метод со стандартным pure pursuit. Улучшенный контроллер сохранял робот значительно ближе к заданному пути во всех случаях. На прямых средняя боковая ошибка снизилась примерно до пяти сантиметров, а на кривых ошибка оставалась ниже восьми сантиметров. В отличие от этого, традиционный метод мог отклоняться на несколько десятков сантиметров и показывать большие всплески ошибок при входе и выходе из изгибов, особенно на больших скоростях.
Добавление безопасности в опасных зонах
Исследователи также рассмотрели, как такой робот мог бы вести себя внутри химического завода, где ему могли бы поручать инспекцию горячих реакторов или перевозку образцов. Вместо создания полноразмерного промышленного полигона они использовали детальную модель бионефтеперерабатывающего завода, включающую расположение оборудования и зоны с повышенным риском пожара и взрыва. Они расширили контроллер добавлением фактора безопасности, который автоматически замедляет робота при движении внутри таких опасных зон на основе стандартного индекса пожаро- и взрывоопасности, используемого в процессной безопасности. Моделирование показало, что эта версия PP-DSC с учётом безопасности лишь немного увеличивала ошибку слежения — менее одного процента в среднем — при одновременном обеспечении снижения скорости робота вблизи опасного оборудования.
Выбор правильного инструмента для каждой задачи
Интересный вывод: не существует единой стратегии рулевого управления, которая была бы лучшей во всех условиях. На открытых полях с пологими кривыми динамический метод однозначно превосходил традиционный подход, удерживая путь робота плотным и плавным даже на больших скоростях. В тесной геометрии химического завода, однако, простое pure pursuit с фиксированным расстоянием просмотра иногда работало лучше, особенно на очень крутых петлях и самопересекающихся «восьмёрках», где динамическое расстояние просмотра могло случайно перенаправить робота на неверную ветвь траектории. Авторы приходят к выводу, что роботы должны переключаться между стратегиями в зависимости от формы пути: использовать усовершенствованный контроллер с интегрированной безопасностью для умеренных кривых и движения с учётом опасностей, и возвращаться к схеме с фиксированным расстоянием просмотра для очень тесных или петляющихся участков. Для неспециалистов ключевое послание в том, что безопасная и надёжная навигация роботов в реальных заводах и на полях — это не только хорошие карты и датчики: не менее важны решения о том, куда смотреть и с какой скоростью двигаться.
Цитирование: Promkaew, N., Junhuathon, N., Phuphaphud, A. et al. Enhanced pure pursuit with dynamic steering control for autonomous mobile robots and application to safe navigation in chemical plants. Sci Rep 16, 8820 (2026). https://doi.org/10.1038/s41598-026-38695-1
Ключевые слова: автономные мобильные роботы, слежение за трассой, управление рулевым, навигация GNSS-RTK, безопасность на химических предприятиях