Clear Sky Science · ru
Обнаружение лёгких целей и трекинг нескольких целей для инспекции БПЛА в карьерах
Более умные глаза в небе
Открытые карьеры — огромные, суровые пространства, где постоянно движутся тяжёлые самосвалы, экскаваторы и люди. Обеспечение безопасности и стабильной работы обычно требует множества наземных сотрудников и дорогостоящего позиционирующего оборудования, однако мелкие неисправности и непрошеные посетители всё равно могут ускользнуть от внимания. В этой статье исследуется, как лёгкие интеллектуальные дроны могут патрулировать карьеры сверху, автоматически обнаруживая оборудование, людей и проблемы в реальном времени при ограниченных вычислительных возможностях бортовой электроники.
Зачем карьерам нужны лучшие «стражи»
Современные карьеры уже опираются на такие средства, как спутниковое позиционирование и специализированные радиомаяки, чтобы отслеживать самосвалы и технику. Но эти «активные» системы имеют слепые зоны: сигналы могут блокироваться обрывами, пылью или помехами, и они работают только с транспортом и людьми, которые несут соответствующие устройства. Они также не показывают, как выглядит сама неисправность. Дроны, напротив, могут пролетать через труднопроходимую местность, снимать детализированные изображения и видео и отслеживать неконтролируемые цели, такие как посторонние автомобили. Проблема в том, что мощные алгоритмы компьютерного зрения обычно требуют тяжёлых компьютеров, а у дронов ограничены масса, энергия и вычислительная мощность. Авторы поставили цель разработать систему обнаружения и трекинга, достаточно точную и лёгкую, чтобы работать непосредственно на дроне.
Обучая дронов видеть малые и скрытые цели
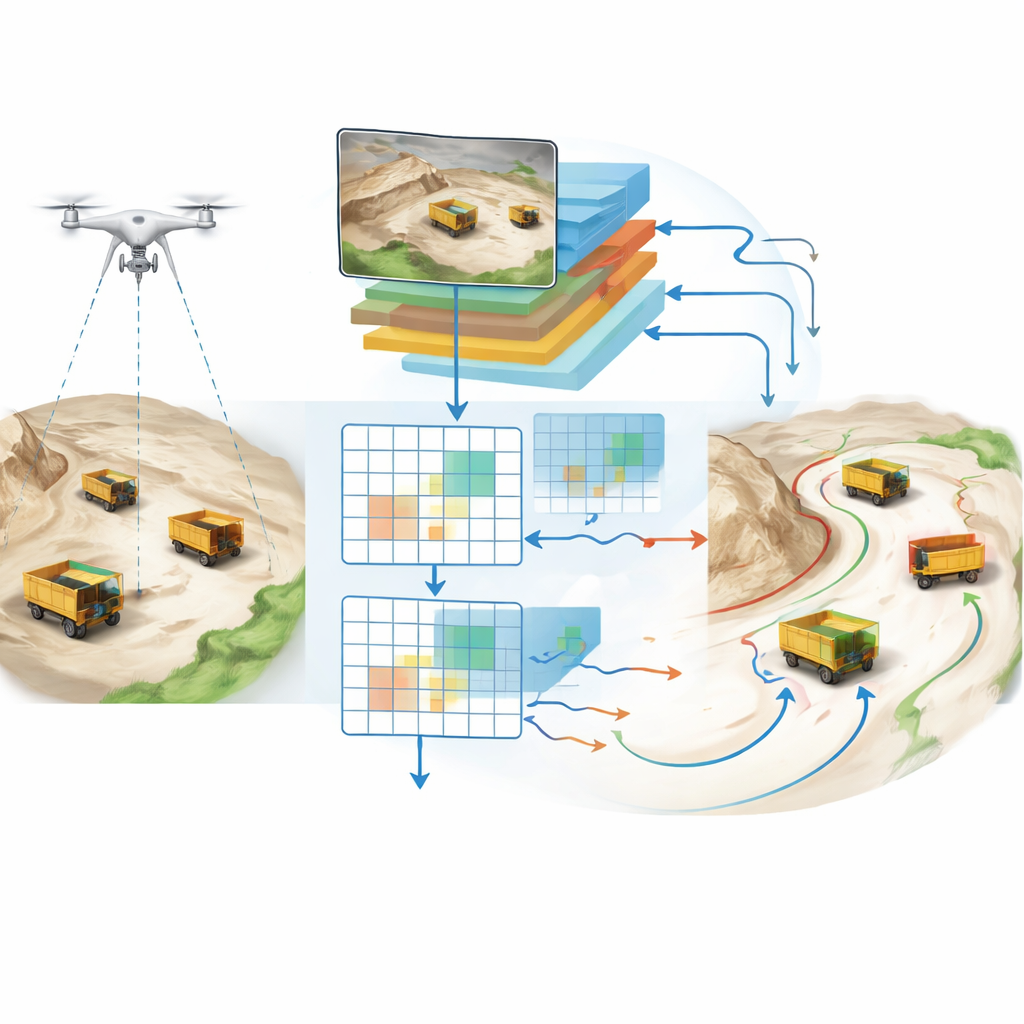
В основе работы — усовершенствованная версия популярной модели зрения YOLO, настроенная специально для условий открытых карьеров. Исследователи переработали «основу» модели так, чтобы она лучше следовала за неправильными контурами самосвалов, экскаваторов и отвальных куч, вместо опоры на жёсткие, сетчатые фильтры. Они также переработали часть сети, которая объединяет информацию с грубых и тонких масштабов изображения, так чтобы маленькие удалённые машины и крупные ближайшие объекты захватывались вместе без путаницы. Сверху на это добавлен новый лёгкий модуль принятия решений, который фокусирует внимание на самых информативных деталях сцены, помогая системе отличать мелкие очаги отказов и частично скрытую технику от загромождённого фона.
Как уместить мощные модели на дроне
Даже с этими улучшениями модель зрения легко может стать слишком большой для аппаратуры дрона. Чтобы решить эту проблему, команда применяет тщательную стратегию обрезки (pruning), которая анализирует, какие внутренние соединения больше всего влияют на производительность, а затем отсекает остальные. Этот процесс уменьшает число параметров и объём вычислений, сохраняя при этом самые сильные пути в сети. На оптимальном уровне обрезки система сохраняет высокую точность детекции, одновременно сокращая размер модели, количество операций и время отклика настолько, чтобы она могла работать на компактном встроенном процессоре, потребляя меньше энергии и увеличивая время полёта. Тесты на собственном наборе данных по карьерам и на публичном бенчмарке для дронов показывают, что обрезанная модель превосходит несколько известных альтернатив, особенно при обнаружении малых и частично скрытых целей.
От снимков к плавным траекториям
Обнаружение объектов на одном кадре — это только половина задачи; карьерам также важно знать, как каждый самосвал или человек перемещается во времени. Для этого авторы улучшили существующий подход к трекингу нескольких объектов, чтобы он лучше справлялся с переполненными сценами, похожими друг на друга транспортными средствами и резкими изменениями движения. Они создали комбинированную меру сходства, учитывающую положение цели, её внешний вид и даже её загрузку (гружена или пуста). Они также поправляют прогнозы движения с учётом изменяющегося ускорения, например когда самосвал поворачивает или поднимается по склону. В совокупности эти шаги уменьшают количество подмен идентичности — когда один автомобиль принимают за другой — и делают линии трекинга плавными и надёжными, при этом оставаясь достаточно быстрыми для работы в реальном времени на аппаратуре уровня дронов.
К безпилотным, круглосуточным патрулям карьеров
Наконец, авторы размещают свои модули зрения и трекинга внутри многоуровневой инспекционной системы, которая может координировать несколько дронов, передавать данные по 5G и ad-hoc связям и отправлять результаты в наземный центр управления. В экспериментах над реальными карьерами такая схема заметно улучшает точность и стабильность мониторинга техники по сравнению с традиционными методами. Для неспециалистов главный вывод в том, что исследование показывает практический путь к тому, чтобы небольшие эффективные летающие роботы постоянно охраняли огромные промышленные объекты, обнаруживая мелкие неисправности, незарегистрированных посетителей и потенциально опасные ситуации до их эскалации — без необходимости в громоздких компьютерах или плотной сети маяков на каждом транспортном средстве.
Цитирование: Liu, G., Zhang, L., Lei, J. et al. Lightweight target detection and multi target tracking for UAV inspection in open pit mines. Sci Rep 16, 8084 (2026). https://doi.org/10.1038/s41598-026-38676-4
Ключевые слова: инспекция дронами, разработка открытых карьеров, обнаружение объектов, отслеживание нескольких объектов, легковесные модели ИИ