Clear Sky Science · ru
Интракортикальный интерфейс «мозг‑машина», основанный на активности вентральной премоторной коры макаки
Обучение мозга перемещать курсор
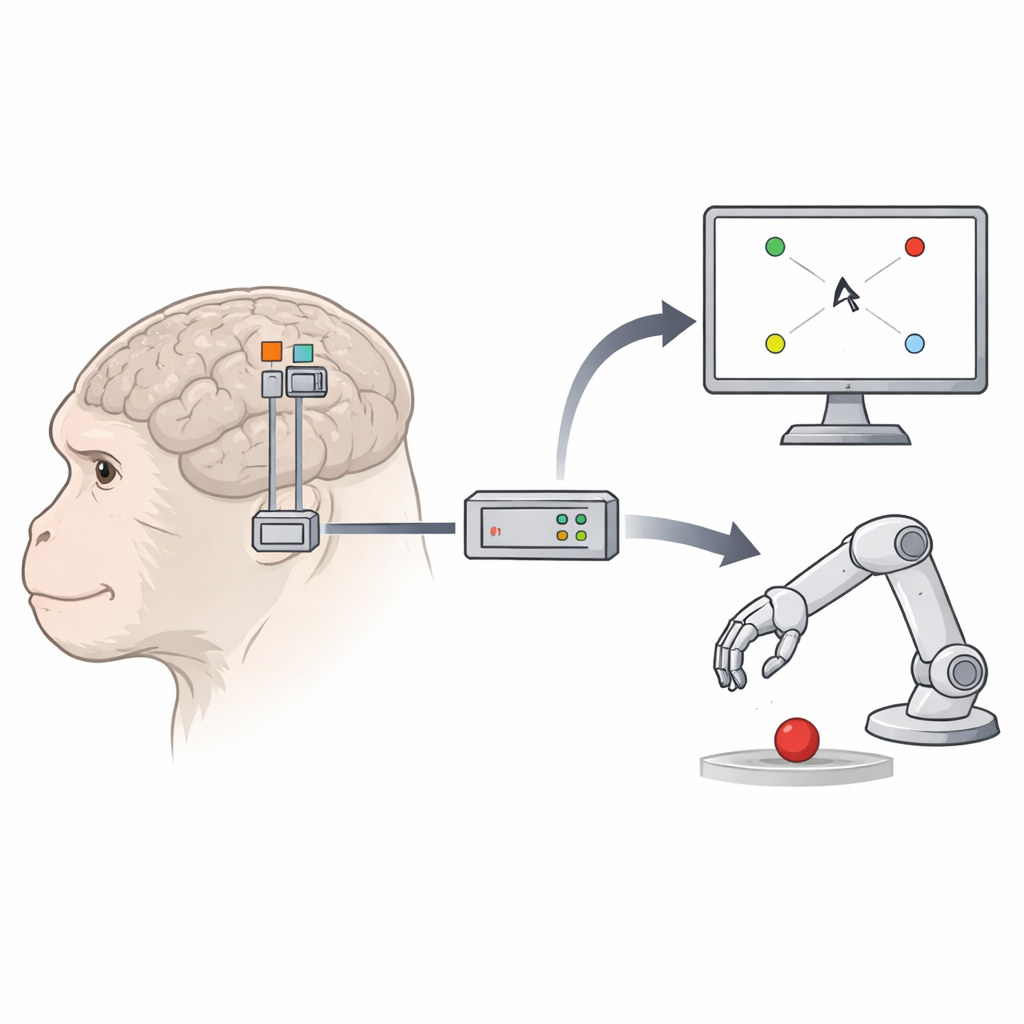
Представьте себе, что вы управляете курсором на экране или роботизированной рукой, используя только мысли, даже если ваши мышцы уже не двигаются. Интерфейсы «мозг–машина» (BMI) ставят такую цель, переводя активность мозга в команды для внешних устройств. Большинство существующих систем опираются на один основной моторный участок мозга, но что происходит, если этот участок повреждён, например при инсульте или боковом амиотрофическом склерозе? В этом исследовании задаются вопросом: может ли другой соседний участок, обычно связанный с планированием действий рукой и наблюдением за движением других, также надежно управлять BMI.
Новый участник в составе команды
Классические BMI в основном считывают сигналы из первичной моторной коры — полосы ткани мозга, непосредственно контролирующей произвольные движения, и из соседней зоны планирования, называемой дорсальной премоторной корой. Исследователи обратили внимание на другого соседа: вентральную премоторную кору, в частности область, называемую F5c. У макак в F5c много нейронов, которые активируются при достижении и захвате объектов и даже при простом наблюдении действий на экране. Такое сочетание реакций на движение и на наблюдение указывает на то, что F5c может подходить для управления курсором или роботизированным «аватаром» без необходимости двигать телом.
Макаки, микроэлектроды и движущиеся мишени
Двум макакам имплантировали по три миниатюрные сетки из 96 электродов: в первичную моторную кору, дорсальную премоторную кору и F5c. В ежедневных сессиях животные выполняли несколько визуально простых, но поведенчески требовательных задач. В одной задаче они касались центра экрана, а затем тянулись к одной из восьми внешних мишеней, в то время как маленький квадратик на экране перемещался от центра к той же мишени. Во второй задаче они держали руку неподвижно и просто наблюдали за движением курсора к мишеням. В третьей, более реалистичной установке, курсор заменяли 3D‑аватаром роботизированной руки, тянущейся к целям в виртуальной сцене. Во всех этих задачах команда могла сравнивать, насколько хорошо каждая область мозга управляла движением курсора или аватара.
Как сигналы мозга превратились в плавное движение
Во время фазы обучения курсор или аватар следовали за компьютерно сгенерированными, плавно изогнутыми траекториями, пока макаки либо двигались, либо наблюдали. Одновременно электроды регистрировали быстрые всплески активности мозга. Затем исследователи обучали декодер — математический инструмент, который учится сопоставлять шаблоны нейронной активности с векторами скорости курсора или аватара на экране. Чтобы отбирать только наиболее информативные каналы, они выбирали электроды, чья активность коррелировала с направлением и скоростью движения. Они применили метод, который выделяет нейронные паттерны, наиболее плотно связанные с поведением, и дополнили его нелинейным этапом, что позволило системе захватывать более сложные зависимости между активностью нейронов и движением. На этапе декодирования компьютер переставал управлять курсором или аватаром; вместо этого декодер использовал живые сигналы мозга, обновляемые каждые 50 миллисекунд, чтобы направлять движение на экране. Декодер периодически дообучался в фоновом режиме, чтобы адаптироваться по мере изменения нейронных откликов во времени.

Насколько хорошо показала себя «новая» область?
Ключевой вопрос заключался в том, сможет ли F5c сравниться по производительности с традиционными участками управления. У обеих макак декодирование на основе F5c поначалу отставало при перемещении курсора, особенно когда животные лишь наблюдали и не двигали собственной рукой. Но по мере прогресса сессий — и по мере того как больше электродов давали надежные сигналы, связанные с движением — F5c догоняла. В ряде условий её результаты сравнялись с первичной моторной корой и даже превзошли её в более поздних сессиях при пассивном управлении курсором. При управлении роботизированным аватаром общая успешность была ниже во всех областях, но F5c по‑прежнему обеспечивала содержательный контроль, особенно в сочетании с мягким ассистивным алгоритмом, который тонко направлял аватар к мишени. Важно, что нейроны во всех трёх областях проявляли сходные закономерности направленной настройки и популяционной активности как во время компьютерного обучения, так и в фазе активного управления, при этом лишь часть нейронов меняла предпочитаемое направление по мере того, как макаки учились управлять BMI.
Что это значит для будущих нейротехнологий
Для неспециалиста главный вывод таков: вентральная премоторная область F5c — ранее рассматривавшаяся в основном как участок планирования и наблюдения за действиями — также может служить практическим узлом управления для интерфейсов «мозг‑машина». При наличии достаточного количества сигналов, связанных с движением, декодеры, обученные на активности F5c, могут направлять экранный курсор или ассистивного робота почти так же хорошо, как те, что основаны на классической моторной области. Это указывает на то, что будущие клинические BMI не обязательно должны полагаться на единственную корковую область. Для людей с повреждённой первичной моторной корой соседние зоны планирования, такие как вентральная премоторная кора, могут предоставить альтернативный путь для восстановления контроля над цифровыми инструментами, протезами или средствами передвижения.
Цитирование: De Schrijver, S., Garcia Ramirez, J., Iregui, S. et al. An intracortical brain-machine interface based on macaque ventral premotor activity. Sci Rep 16, 8407 (2026). https://doi.org/10.1038/s41598-026-38536-1
Ключевые слова: интерфейс мозг‑машина, моторная кора, премоторная кора, нейронное декодирование, управление протезом