Clear Sky Science · ru
Система нечеткой логики типа 3 на основе виртуальной структуры для предсказательного обнаружения, компенсации и управления при отказах датчиков и исполнительных механизмов в нелинейных системах
Держать машины в строю, когда детали дают сбой
Современные технологии — от роботизированных манипуляторов на заводских линиях до химических установок, регулирующих кислотность — полагаются на датчики и исполнительные механизмы, которые незаметно обеспечивают работу. Но когда эти элементы смещаются, залипают или выходят из строя, система может стать небезопасной задолго до того, как кто‑то это заметит. В этой статье предложен новый подход, позволяющий машинам самостоятельно ощущать и корректировать такие проблемы, даже если у инженеров нет точной математической модели внутреннего поведения системы.
Почему скрытые проблемы так трудно обнаружить
Во многих реальных ситуациях поведение системы сильно нелинейно: небольшие изменения на входе могут вызвать большие, непредсказуемые скачки на выходе. Традиционные методы управления предполагают, что проектировщики знают уравнения, описывающие это поведение, и что датчики и исполнительные устройства в основном работают как положено. На практике компоненты стареют, дают помехи или заменяются немного другим оборудованием. Обычные отказоустойчивые регуляторы либо закладывают фиксированные запасные маржи (пассивные методы), либо полагаются на точные модели для обнаружения и компенсации отказов (активные методы). Обе стратегии испытывают трудности, когда система со временем меняется или её внутренняя структура неизвестна. Авторы утверждают, что промышленности нужны контроллеры, которые учатся на текущих данных, распознают, когда датчики или исполнительные устройства работают неисправно, и в реальном времени компенсируют эти отказы без подробного чертежа системы.
Обучающийся контроллер, рассматривающий систему как «черный ящик»
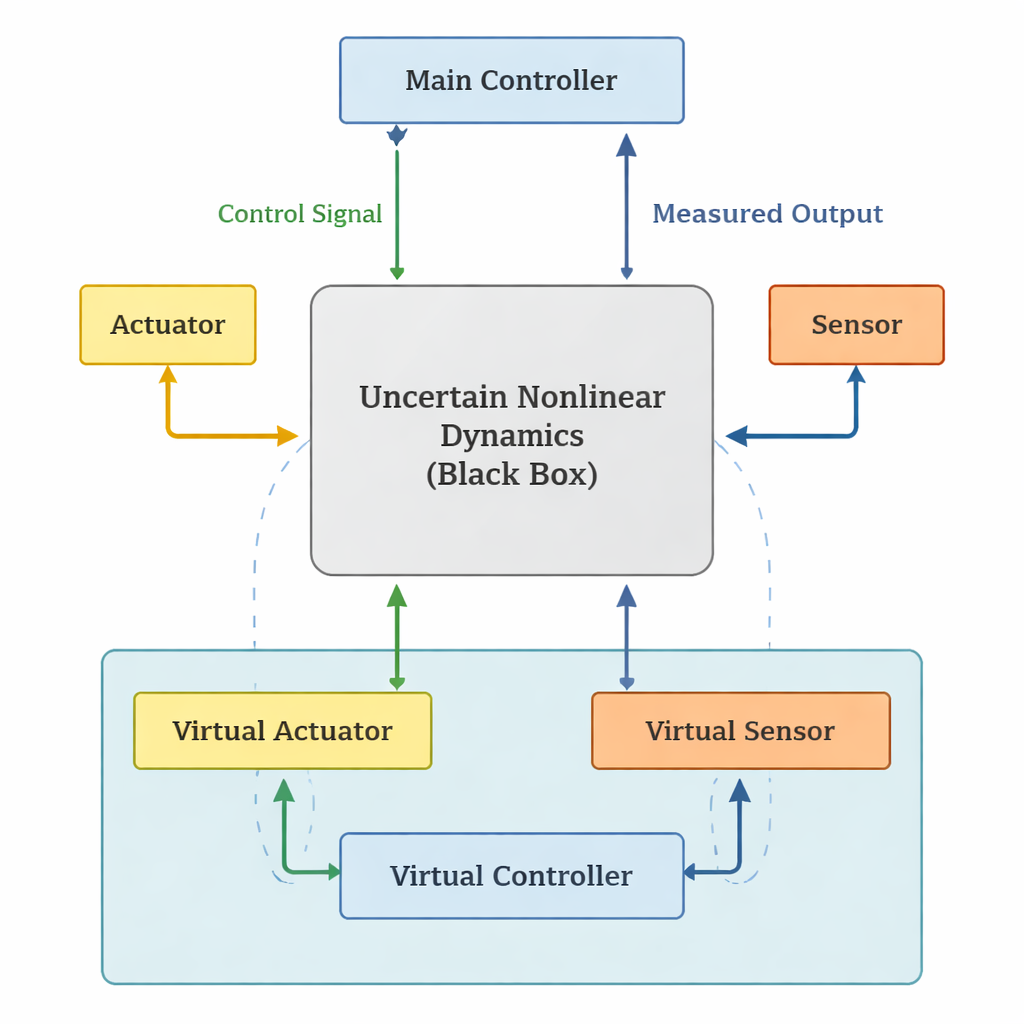
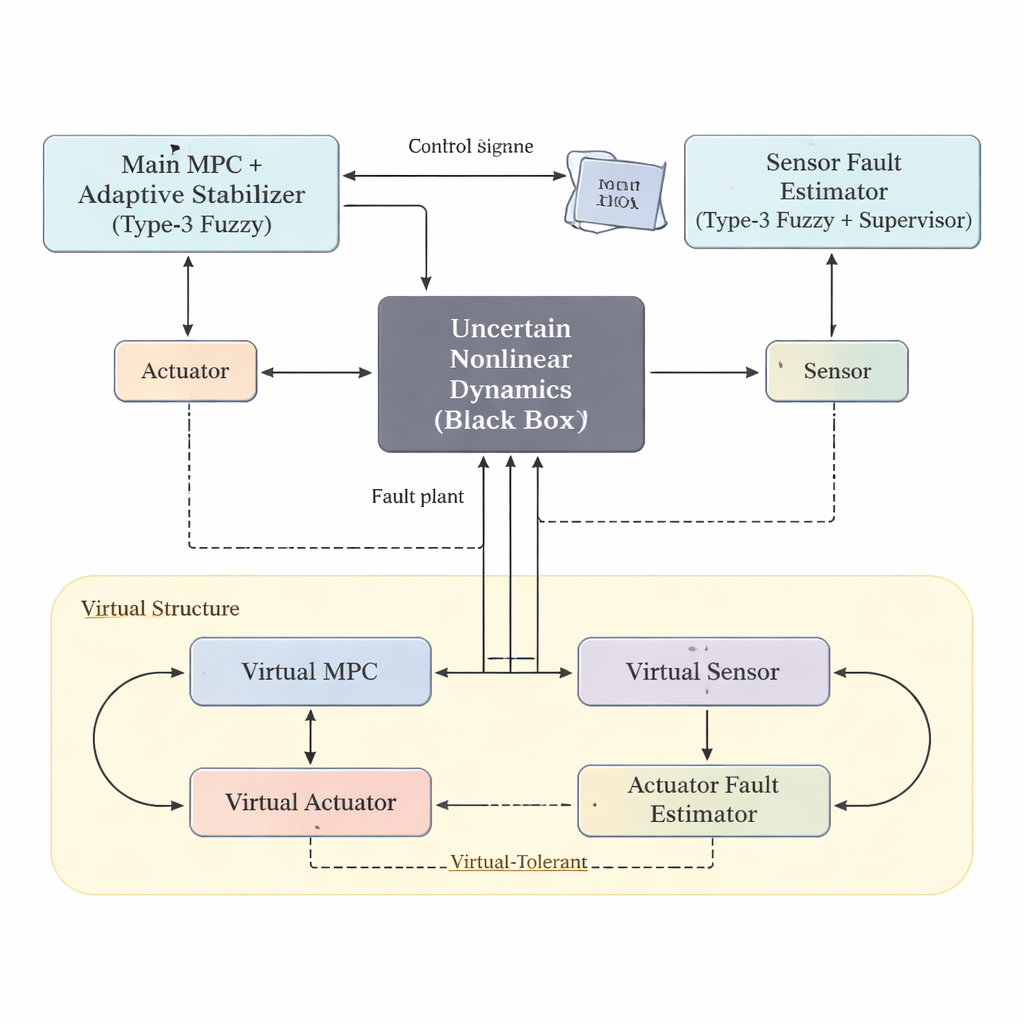
Предлагаемая структура рассматривает объект управления исключительно как «чёрный ящик»: она видит только поданные управляющие сигналы и измеренные датчиками выходы. В основе — нечеткая система типа 3, продвинутая форма нечеткого моделирования, рассчитанная на сильную неопределённость и шум измерений. Эта нечеткая система онлайн обучает компактное входно‑выходное описание неизвестной динамики, а предсказательный регулятор на базе модели (MPC) использует полученную модель для планирования будущих управляющих действий на коротком горизонте. Параллельно работает адаптивный стабилизирующий блок, который гарантирует, что даже если модель несовершенна или параметры дрейфуют, комбинированная обратная связь удерживает ошибку слежения в пределах и со временем стремится к нулю.
Наблюдение за наблюдателями: обнаружение ошибок датчиков и приводов
Структура разделяет обработку отказов на два скоординированных компонента. Во‑первых, блок обнаружения отказов датчика использует два дополнительных оценивателя на базе нечетких систем типа 3 плюс надзирающий блок, чтобы вывести, насколько показание датчика отклонилось от ожидаемого установившегося значения. На основе этого генерируется корректирующий сигнал, который фактически «выровнивает» неисправное измерение, чтобы главный контроллер продолжал получать достоверный выход. Во‑вторых, метод строит виртуальную структуру, зеркалирующую реальную систему: в неё включены виртуальный датчик, виртуальный привод, собственный нечеткий идентификатор и виртуальный MPC. Поскольку виртуальная петля не страдает от деградации реального привода, различия между виртуальным и реальным траекторными путями управления выявляют степень отказа настоящего исполнительного устройства. Простая формула превращает этот разрыв в оценку уровня отказа, которая затем компенсируется в основном управляющем сигнале.
Доказательство устойчивости и тесты на роботах и химических резервуарах
Чтобы показать, что подход не только интуитивно ясен, но и математически обоснован, авторы конструируют функцию Ляпунова — своего рода меру энергии — которая включает ошибки слежения, ошибки моделирования и настраиваемые параметры нечеткой модели. Они выводят законы обновления для адаптивных членов так, чтобы эта энергия всегда убывала, демонстрируя, что ошибки сокращаются со временем даже при возмущениях и отказах. Затем в симуляциях метод тестируют на двух сильно отличающихся примерах: однозвенном роботизированном манипуляторе и процессе нейтрализации pH в химическом резервуаре. В обоих случаях истинная динамика рассматривается как полностью неизвестная, параметры меняются, и в ходе работы вводятся отказы и датчиков, и приводов. Контроллер поддерживает точное слежение, быстро оценивает величину отказов и сохраняет низкие уровни риска и ошибок, превосходя более простые нечеткие контроллеры и другие продвинутые отказоустойчивые схемы из литературы.
Что это значит для реальных систем
Для неспециалистов ключевое сообщение в том, что этот метод придаёт сложным системам своего рода встроенное самосознание. Вместо того чтобы полагаться на идеальную модель или ручную переналадку инженерами, контроллер непрерывно учится на наблюдаемых данных, замечает, когда датчики или исполнительные устройства начинают «врать» или слабеть, и автоматически корректирует свои действия, чтобы поддерживать стабильную производительность. Поскольку ему нужны только входные и выходные данные, метод, в принципе, может применяться к широкому кругу машин без полной переработки. Хотя результаты основаны на моделировании, и аппаратные аспекты ещё требуют изучения, работа указывает путь к более устойчивым роботам, промышленным процессам и другим автономным системам, которые остаются надёжными даже когда их компоненты и окружение далеки от идеала.
Цитирование: Hong, X., Zhakiyev, N., Yedilkhan, D. et al. A virtual-structure-based type-3 fuzzy system for predictive sensor and actuator fault detection, compensation, and control in nonlinear systems. Sci Rep 16, 7153 (2026). https://doi.org/10.1038/s41598-026-38456-0
Ключевые слова: отказоустойчивое управление, нечеткая логика, предсказательное управление на основе модели, отказы датчиков и исполнительных устройств, нелинейные системы