Clear Sky Science · ru
Исследование метода позиционирования при сортировке посылок в беспорядочной логистике
Почему умная сортировка посылок важна
Каждый ваш онлайн‑заказ запускает невидимый балет коробок в больших логистических центрах. Прежде чем посылка сможет быстро отправиться к вашей двери, её нужно найти, поднять, измерить, просканировать и направить — часто из хаотичной кучи смешанных отправлений. Сегодня большая часть этой начальной «раскладки хаоса» всё ещё опирается на людей, выполняющих повторяющиеся и утомительные операции. В этой работе предлагается новый метод на основе зрения, который помогает роботам надежно обнаруживать места захвата каждой посылки в беспорядке, делая ещё один шаг к полностью автоматизированной, более быстрой и менее трудоемкой сортировке.
От беспорядочных куч к данным, удобным для роботов
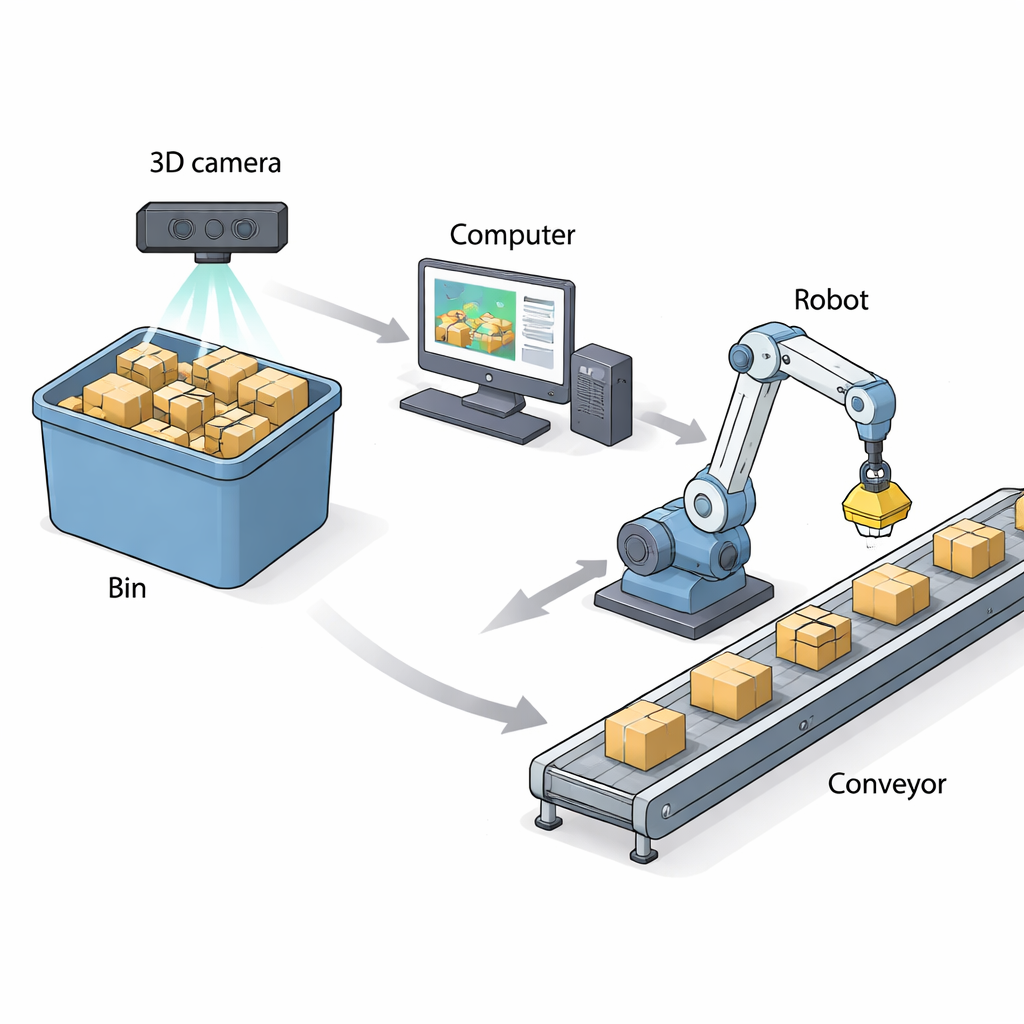
Исследователи сосредоточились на том, что они называют «беспорядочной» логистикой: повседневные коробки и мягкие мешки, брошенные в контейнеры без порядка, иногда придавленные или деформированные от штабелирования. Чтобы заменить людей в такой среде, роботу сначала нужно знать точно, куда дотянуться и как ориентировать захват на поверхности целевой посылки. Команда построила систему вокруг 3D‑камеры, которая фиксирует как цветное изображение, так и карту глубины верхнего слоя посылок. Современная сеть распознавания (на базе YOLOv8) выделяет отдельные посылки на цветном изображении, а карта глубины показывает их трёхмерную форму. Такое сочетание позволяет компьютеру выбрать лучшую посылку для следующего захвата — ту, которая недостаточно закрыта и расположена на безопасном удалении от краёв контейнера — и затем вычислить точную точку захвата.
Нахождение устойчивой точки захвата по трём точкам и «тени»
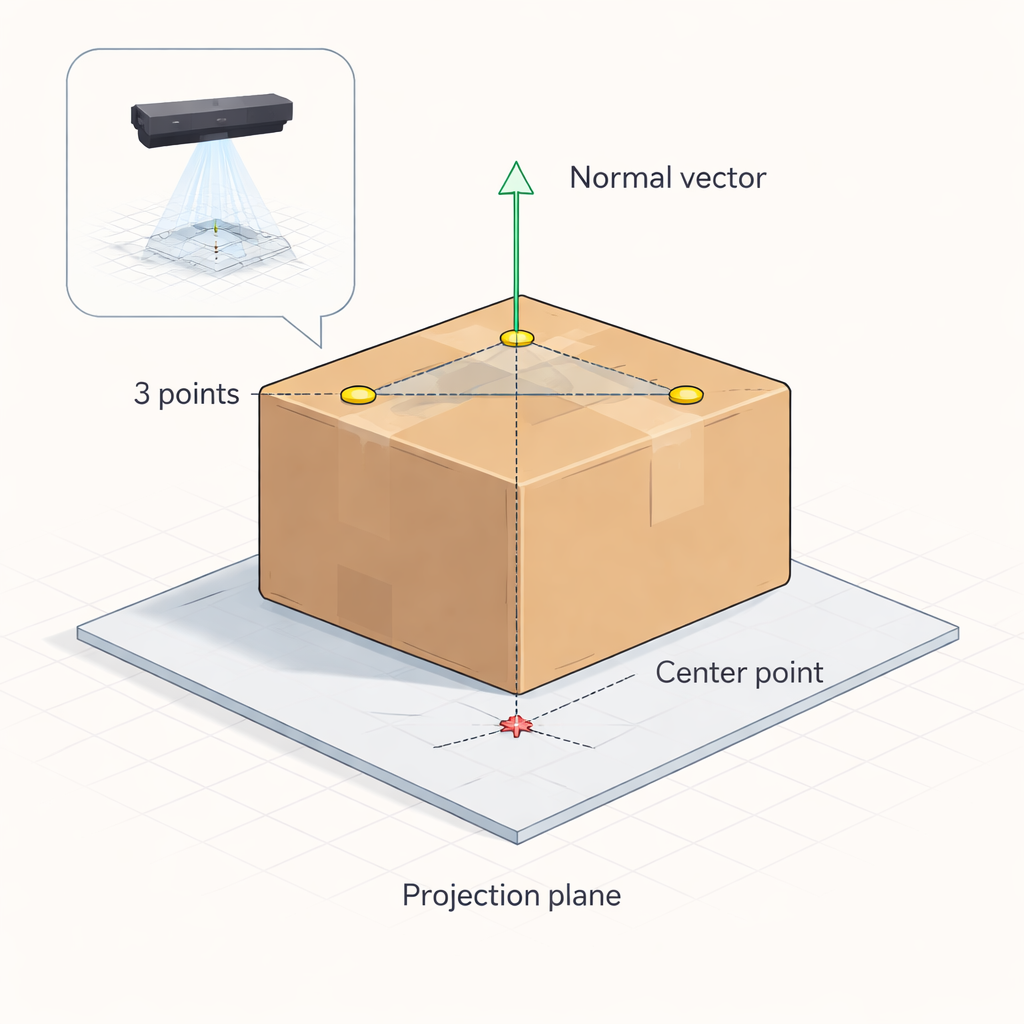
В основе метода лежит геометрический приём, который авторы называют алгоритмом центрирования по трём точкам с ориентацией‑проекцией. После выбора целевой посылки система случайным образом выбирает три точки на её верхней поверхности по данным глубины. Эти три точки задают плоскость, как три штыря на столе определяют наклон стола. Из этой плоскости алгоритм вычисляет «нормаль» — линию, перпендикулярную поверхности посылки. Параллельно система использует четыре верхних угла посылки на изображении, чтобы вывести геометрический центр её проекции, подобно поиску центра тени прямоугольника. Сочетание ориентации плоскости и позиции этого центра даёт точное 3D‑местоположение для захвата и наклон верхней поверхности посылки, которые затем направляют присоску или захват робота.
Работа с придавленными и выпуклыми посылками
Реальные посылки не являются идеальными блоками: пузырчатые конверты провисают, мягкие сумки выпирают, а картонные коробки могут деформироваться под нагрузкой. Простая гипотеза плоской поверхности потерпела бы неудачу в таких случаях. Чтобы решить эту проблему, авторы расширяют математическую модель, чтобы различать три ситуации: почти плоские посылки, выпуклые (выпирающие) верхи и вогнутые (провисающие) поверхности. Сравнивая максимальные и минимальные значения глубины на поверхности посылки, система сначала определяет, значительно ли она деформирована. Если да, то анализирует, как деформированная поверхность пересекается с воображаемой опорной плоскостью, и аппроксимирует это пересечение эллипсом. Исходя из этого, она решает задачу поиска «оптимальной» плоскости, которая лучше всего представляет собой устойчивую поверхность захвата — даже если реальная поверхность провисла или выпучилась — и затем проецирует ключевую точку захвата обратно на эту плоскость.
Испытание алгоритма
Чтобы проверить работоспособность математической модели на практике, команда собрала испытательный стенд с шестьюсной промышленным роботом, 3D‑камерой и самодельным устройством с лазером и зондом. Сначала они отмечали истинный геометрический центр верхней поверхности каждой тестовой посылки и двумя лазерными лучами устанавливали это физическое положение в пространстве. Затем их система зрения вычисляла собственную оценку того же центра, и робот перемещал второй зонд в вычисленную точку. Замерив малый сдвиг между наконечниками двух зондов, они могли вычислить ошибку позиционирования. Тесты с жёсткими модельными деревянными коробками и с реалистичными упаковочными материалами — гофрокоробами, пузырчатыми конвертами и пластиковыми пакетами, размером до 250×250 мм — показали максимальную погрешность позиционирования около 1,7 миллиметра и средние ошибки близкие к 1 миллиметру по каждой оси. Полный цикл вычислений для каждой посылки занимал примерно 17,5 миллисекунды, что достаточно быстро для линий высокопропускной сортировки.
Что это значит для будущих складов
Проще говоря, исследование демонстрирует, что робот, оснащённый 3D‑камерой и этим алгоритмом на основе трёх точек и проекции, может с миллиметровой точностью надёжно определять, где и как захватывать посылки из беспорядочного контейнера. Хотя сильные деформации очень мягких упаковок всё ещё снижают точность, метод остаётся достаточно устойчивым для реалистичных складских условий. По мере роста объёмов посылок и сохранения дефицита рабочей силы такие алгоритмы способны переложить самые тяжёлые и монотонные операции с людей на машины — сделав работу безопаснее и менее однообразной и помогая бесперебойно обеспечивать развивающуюся сферу электронной коммерции.
Цитирование: Han, Y., Zhang, F., He, A. et al. Research on positioning method in parcel sorting in disordered logistics. Sci Rep 16, 7524 (2026). https://doi.org/10.1038/s41598-026-38092-8
Ключевые слова: 3D‑зрение, сортировка посылок, роботизированная захватка, автоматизация логистики, локализация объектов