Clear Sky Science · ru
Исследование влияния ориентации магнитов на характеристики внутреннего ротора BLDC-двигателя для электромобилей: подход методологии отклика поверхности
Тише и плавнее: моторы для будущих электропоездок
Для водителя электромобили могут казаться тихими и не требующими усилий, но внутри их моторов идет множество невидимых магнитных противоборств. Слабые магнитные силы могут вызывать дергание колеса, гул или терять энергию в виде тепла. В этой статье исследуется новый способ размещения магнитов внутри компактного мотора, чтобы малые электрические транспортные средства — например гибридные мопеды — работали более плавно, тихо и эффективно, без необходимости увеличивать емкость батареи.
Почему плавность хода мотора важна на дороге
Современные электромобили часто используют безколлекторные постоянные двигатели, в которых для вращения ротора применяются постоянные магниты вместо механических щеток. Эти моторы легкие, эффективные и мощные, поэтому подходят для ограниченных по пространству приложений, таких как двухколесные транспортные средства. Но у них есть нежелательный эффект — наскоковый момент (cogging torque): магнитное «зацепление» между магнитами ротора и зубцами статора, вызывающее вибрацию, пульсацию момента и рывки, особенно на низких скоростях. Для ездока это проявляется в виде шума, неравномерного разгона и потерь эффективности. Поэтому снижение наскокового момента при сохранении высокого крутящего момента и эффективности является ключевой задачей проектирования для более чистой и комфортной электромобильности.
Новая регулировка: как направлены магниты
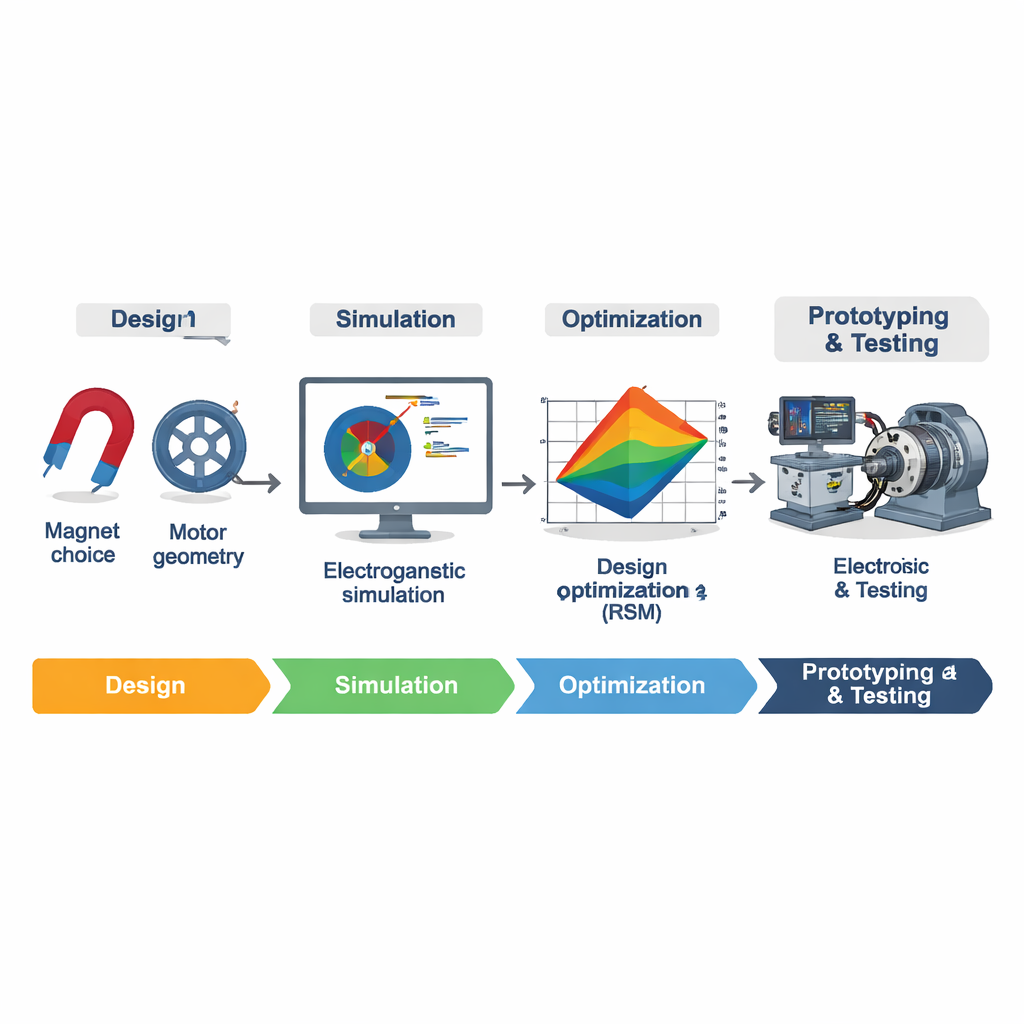
Большая часть предыдущих исследований пыталась уменьшить наскоковый момент за счет изменения формы металлических частей мотора — изменения формы пазов, ширины полюсов или воздушных зазоров — либо за счет сдвига статора (skew). В этом исследовании авторы сохраняют общий размер мотора и конструкцию статора и рассматривают ориентацию магнитов и угол сдвига ротора как основные «ручки настройки». Они сосредотачиваются на двигателе с внутренним ротором, где магниты встроены внутрь вращающегося сердечника, а не установлены на поверхности. Используя программное обеспечение Siemens Simcenter Motorsolve, они создают 12 виртуальных прототипов, комбинируя разные углы ориентации магнитов (10°, 20°, 30°) с разными углами сдвига (0°–40°). Для каждого случая рассчитываются ключевые характеристики: средний крутящий момент, эффективность, наскоковый момент и форма волны обратной электродвижущей силы (ЭДС), что сильно влияет на управляемость мотора.
Поиск оптимума при помощи статистики
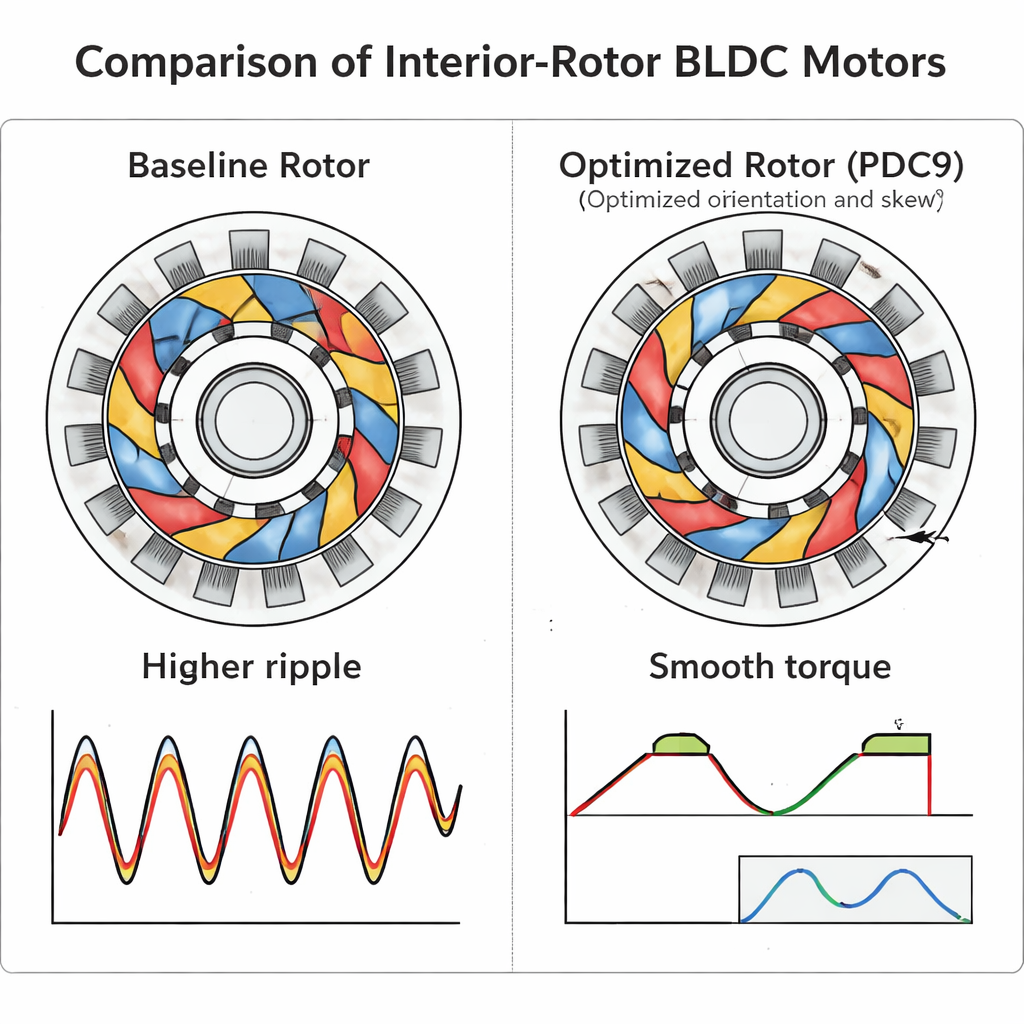
Чтобы выйти за рамки проб и ошибок, команда использует статистический метод под названием методология поверхности отклика (Response Surface Methodology, RSM). Вместо испытания каждой возможной комбинации углов, RSM строит математическую «карту», показывающую, как меняются характеристики при совместном изменении ориентации магнитов и угла сдвига. Затем они определяют, что считать «хорошим» — высокая эффективность, большой момент и мощная обратная ЭДС, но очень низкий наскоковый момент — и сводят эти цели в единый показатель желательности. Исследуя эту поверхность отклика, они выявляют комбинацию, дающую наилучший общий компромисс. Оптимальная виртуальная конфигурация указывает на ориентацию магнитов 20° и угол сдвига ротора 40°, обозначенную авторами как PDC9. Этот дизайн обещает примерно на 43% больший крутящий момент по сравнению с базовой компоновкой, практически нулевой наскоковый момент и эффективность выше 94%, при сохранении трапецеидальной формы обратной ЭДС, предпочтительной для приводов безколлекторных двигателей.
От экрана к цеху: сборка и испытания мотора
Чтобы продемонстрировать работоспособность идеи вне компьютера, исследователи изготовили реальный мотор по спецификациям PDC9. Они использовали ламинированную электротехническую сталь для статора и ротора и магниты из высокоэнергетического неодим-железо-борного сплава внутри ротора, все в размерах, рассчитанных на привод 48 В, примерно 1,5 кВт, подходящий для гибридного мопеда. Прототип затем испытывали на стенде с динамометром, где измерялись крутящий момент, скорость и напряжение в разных режимах работы. Экспериментальный мотор обеспечивает около 3,8 Н·м крутящего момента на номинальной скорости с эффективностью около 92% и демонстрирует требуемую трапецеидальную форму обратной ЭДС. Хотя результаты немного уступают идеализированным значениям моделирования — что ожидалось из-за трения, допусков на изготовление и дополнительных потерь — они в целом следуют предсказанным тенденциям, подтверждая, что точная ориентация магнитов и сдвиг могут обеспечить более плавную и тихую работу без увеличения габаритов машины.
Что это значит для повседневных электромобилей
Проще говоря, работа показывает, что то, как «направлены» магниты внутри мотора, может быть не менее важно, чем их размер или состав. Наклоняя и смещая магниты под правильными углами, авторы почти устраняют внутренние магнитные зацепления, вызывающие толчки и шум, одновременно увеличивая полезный крутящий момент и сохраняя высокую эффективность. Для ездоков это означает более мягкие трогания с места, меньше вибраций и лучшее использование батареи в небольших электротранспортных средствах. Для конструкторов и производителей исследование предлагает практическую рецептуру — подтвержденную как моделированием, так и экспериментальной разработкой — для настройки безколлекторных двигателей с внутренним ротором в соответствии с растущими требованиями городской электрической мобильности.
Цитирование: Chandra, V., Manoharan, P.S., Thenmozhi, G. et al. Investigation of magnetic orientation effects on interior rotor BLDC motor performance for EVs: a response surface methodology approach. Sci Rep 16, 7011 (2026). https://doi.org/10.1038/s41598-026-37981-2
Ключевые слова: безколлекторный постоянный двигатель, наскоковый момент (cogging torque), ориентация магнита, двигатель для электромобиля, угол сдвига ротора