Clear Sky Science · ru
Дискретные по времени нечеткие оцениватели H_∞ для управления нелинейными параболическими уравнениями в частных производных
Удержание сложных систем в устойчивом состоянии
Многие физические и биологические системы — такие как теплопроводность в металлическом стержне, распространение химических веществ в реакции или сигналы, идущие по ткани — изменяются как во времени, так и по пространству. Такие системы трудно удерживать устойчивыми, особенно при наличии реальных помех и возмущений. В этой статье предложен новый подход к разработке цифровых регуляторов, которые поддерживают устойчивость и устойчивость к возмущениям для подобных систем, оставаясь при этом практичными для реализации на современных компьютерах и микроконтроллерах.
Почему важны и пространство, и время
В повседневных задачах управления инженеры часто моделируют систему обычными дифференциальными уравнениями, где переменные зависят только от времени. Но многие важные явления — от температуры в печи до концентраций в реакторе — также зависят от положения. Такие процессы лучше описываются уравнениями в частных производных, которые отслеживают эволюцию величин и по пространству, и по времени. Эти модели мощны, но математически требовательны, особенно когда поведение нелинейно и подвержено случайным возмущениям и шумам измерений.
От нечетких правил к управляемой модели
Для укрощения этой сложности авторы используют нечеткую модельную структуру, известную как подход Такаяги–Сугено (T–S). Вместо того чтобы работать напрямую с одним сложным нелинейным уравнением, они аппроксимируют систему плавным объединением нескольких более простых линейных моделей, каждая из которых справедлива в своей локальной области рабочего режима. Эти части связываются через нечеткие правилa «если–то», превращая громоздкую нелинейную систему в частных производных в структурированное семейство линейных моделей. Исследователи внимательно учитывают небольшие погрешности, введенные этой аппроксимацией, чтобы они не подрывали устойчивость и качество работы.
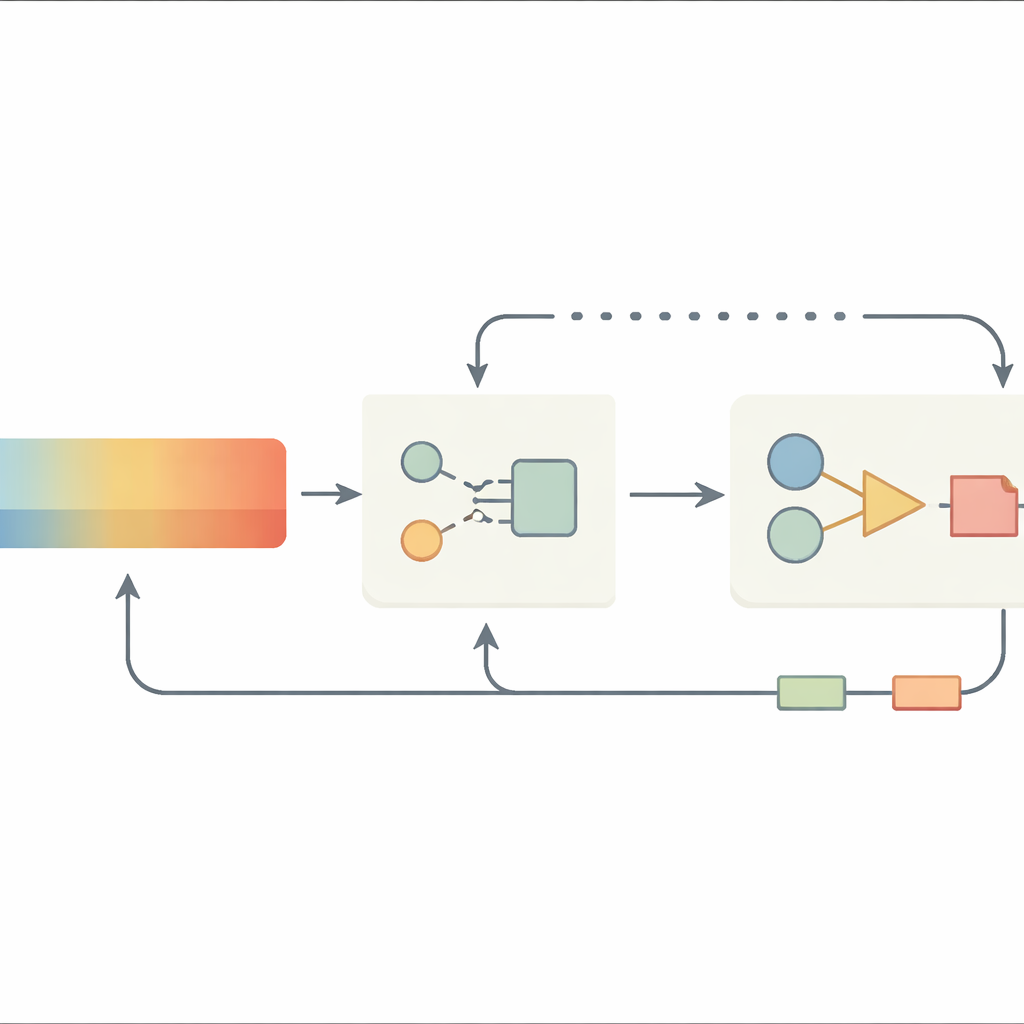
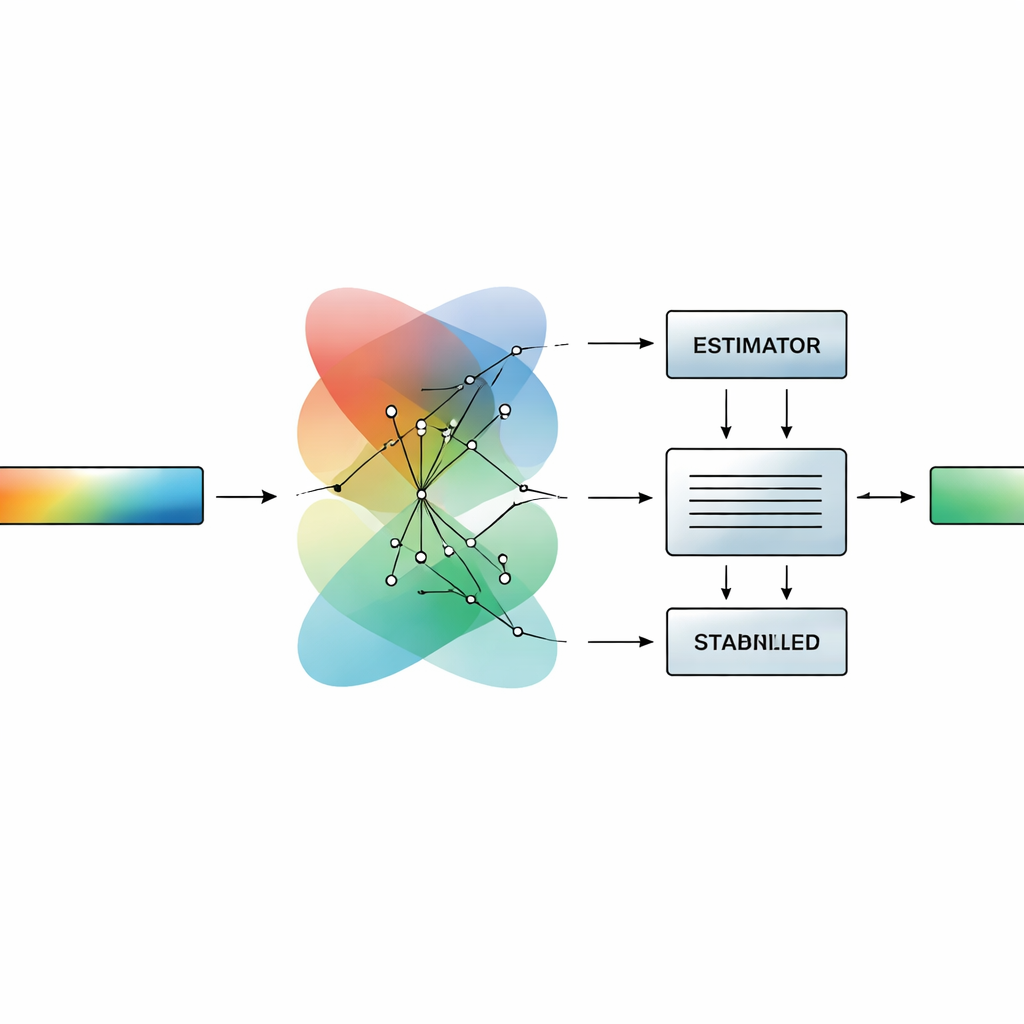
Цифровое управление с дискретной выборкой во времени
Современные регуляторы обычно реализуются на цифровом оборудовании, которое обновляет управляющее воздействие в дискретные моменты времени, а не непрерывно. Такое «дискретно-временное» поведение само по себе может создавать трудности, например задержки и резкие скачки между обновлениями. В статье разработан регулятор, который явно учитывает этот дискретный характер. Он опирается на оцениватель, восстанавливающий внутреннее состояние распределенной системы по зашумленным измерениям, и на нечеткий закон обратной связи, вычисляющий управляющее воздействие в каждый момент выборки. Рассматривая эффект дискретизации как временную задержку в канале управления, авторы строят математическую модель, отражающую взаимодействие цифровых обновлений с пространственно распределенной динамикой.
Гарантия робастного качества работы
Реальные системы никогда не бывают полностью спокойными: внешние возмущения, шумы датчиков и неопределенности в моделировании могут ухудшать поведение. Чтобы с этим справиться, авторы используют меру качества в стиле H-инфинити, которая требует от регулятора ограничить влияние возмущений заданным уровнем для всех допустимых сигналов шума. Применяя современные инструменты теории устойчивости — такие как функционалы Ляпунова, интегральные неравенства и формулы для работы с диффузионными членами — они выводят условия, при которых замкнутая система не только устойчива во времени, но и устойчива к возмущениям. Важная деталь: эти условия выражены в виде линейных матричных неравенств, стандартного формата для оптимизации, который можно эффективно проверять и решать с помощью готового программного обеспечения, например LMI-пакета MATLAB.
Тестирование метода на колебательной химической реакции
Чтобы показать, что теория работает не только на бумаге, авторы применяют свой метод к реакции Белоусова–Жаботинского — классической колебательной химической системе, волны которой напоминают волны в биологических тканях, например в сердце. Они моделируют реакцию как пространственно распределённый процесс, затем проектируют дискретно-временной нечеткий оцениватель и регулятор согласно предложенным критериям. Численные моделирования показывают, что регулятор приводит систему к устойчивому поведению как без возмущений, так и при наличии значительных внешних шумов. Метод также превосходит несколько ранних подходов по уровню возмущений, который он способен переносить при сохранении устойчивости.
Практический смысл работы
Проще говоря, эта работа показывает, как разработать цифровой регулятор, способный надежно стабилизировать сложные процессы, распределённые в пространстве, даже когда система нелинейна и подвержена шумам. Комбинируя нечеткое моделирование, оцениватель для восстановления скрытых состояний и меру робастного качества, авторы предлагают рецепт, который инженеры могут реализовать с помощью стандартных численных инструментов. Это открывает путь к более надежному управлению процессами от химических реакторов до продвинутых тепловых и биологических систем при использовании эффективных цифровых контроллеров.
Цитирование: Sivakumar, M., Dharani, S. & Cao, J. Sampled-data fuzzy \(H_\infty\) estimators for control of nonlinear parabolic partial differential equations. Sci Rep 16, 9010 (2026). https://doi.org/10.1038/s41598-026-37959-0
Ключевые слова: нечеткое управление, дискретно-временные системы, системы с распределенными параметрами, робастная стабилизация, реакция Белоусова–Жаботинского