Clear Sky Science · ru
Перенастраиваемый анализ и оптимизация рабочего объёма модульного параллельного робота на тросах
Роботы, которые движутся по невидимым рельсам
Представьте робота, который может плавно перемещать тяжёлую камеру по стадиону, поднимать стройматериалы над площадкой или вести реабилитационный прибор вокруг пациента — при этом он висит на тросах, а не ездит на жёстких рычагах. В этой статье предложен новый тип тросового робота, структура которого может быть перестроена по требованию, позволяя одной машине адаптироваться к множеству задач и извлекать максимум полезного движения из своего рабочего пространства.
Сборка робота из сменных модулей
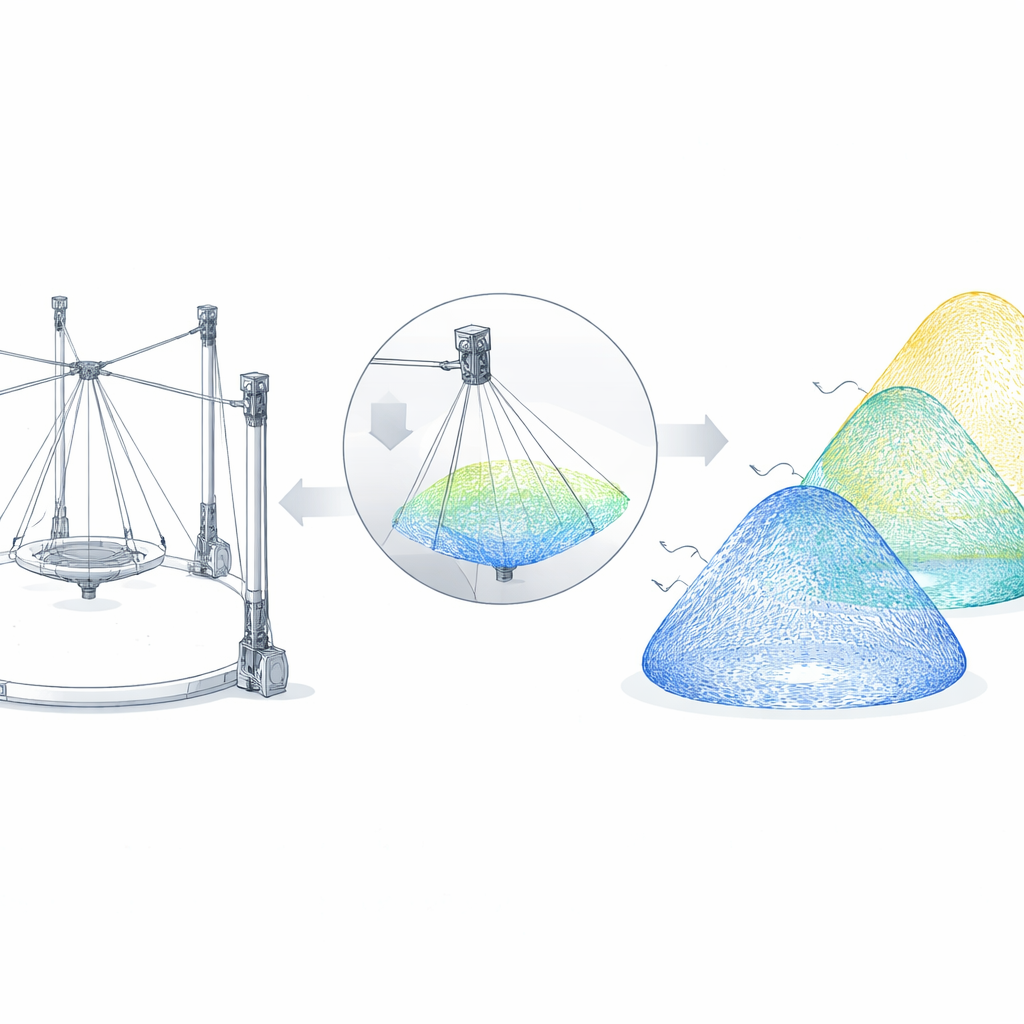
В центре исследования — модульный параллельный робот на тросах (MCSPR). Вместо фиксированных металлических рычагов он использует до шести одинаковых «ветвей», каждая из которых представляет собой башню с моторами, шкивами и тросом, соединённым с центральной подвижной платформой — энд‑эффектором. Эти ветви располагаются по окружности и могут добавляться, удаляться, поворачиваться, подниматься и опускаться. Переставляя их, одно и то же железо может вести себя как несколько разных машин: с двумя ветвями оно движется в плоскости, с тремя или четырьмя — свободно в пространстве, а с пятью или шестью — дополнительно может наклонять и вращать платформу в нескольких направлениях.

Планирование «скелета» изменяющейся машины
Проектирование такой гибкой системы — не просто вопрос болтов и сборки. Авторы используют систематический подход «структурного синтеза», рассматривая каждый трос, шкив и шарнир как базовый строительный блок в сети. С помощью диаграмм, похожих на графы, они отображают, как эти элементы соединяются, чтобы платформа получила требуемые степени свободы — например, скольжение по трём осям или вращение вокруг них. Этот каталог модулей и связей служит инструментарием проектировщика: в зависимости от требуемого движения можно выбрать количество ветвей и их размещение по круговому направляющему, будучи уверенным, что полученная структура будет вести себя как задумано.
Понимание направлений движения платформы
Поскольку платформа висит на тросах, которые могут только тянуть, а не толкать, предсказать её движение сложнее, чем для традиционных роботов. Команда развивает унифицированное математическое описание, работающее для всех пяти основных конфигураций MCSPR. Для заданной позиции и ориентации платформы они точно вычисляют длину каждого троса и скорость изменения этой длины. Затем они собирают физический прототип и задают платформе плавный спиральный путь в пространстве. Датчики вдоль тросов фиксируют фактические движения, которые хорошо совпадают с предсказанными. Это подтверждает, что модель надёжно управляет роботом даже при перестройке его геометрии.
Определение областей, где робот может безопасно висеть неподвижно
Не менее важно понять, где подвешенная платформа может оставаться в равновесии. Если какой‑то трос провиснет, управление потеряется. Авторы сосредотачиваются на том, что называют рабочим объёмом статического равновесия: области пространства, где все тросы могут находиться под положительным натяжением, когда на платформу действует только сила тяжести. Используя метод Монте‑Карло, они случайным образом пробуют множество возможных позиций и ориентаций платформы и проверяют для каждой, укладываются ли необходимые натяжения тросов в допустимые пределы. Принятые образцы формируют трёхмерное облако, очерчивающее рабочий объём, доступный роботу.
Расширение досягаемости робота за счёт умной настройки
Поскольку ветви MCSPR могут менять высоту и угол, а платформа может нести грузы разной массы и иметь различные углы наклона, размер и форма этой безопасной области не являются постоянными. Исследователи систематически варьируют эти параметры в конфигурации с шестью ветвями. Они показывают, что более тяжёлый полезный груз резко сокращает область, где робот может оставаться в равновесии, тогда как продуманный выбор высот ветвей и их углового расположения может её увеличить. Далее они формулируют задачу оптимизации: подобрать полезную нагрузку, высоты ветвей, углы ветвей и диапазон наклонов платформы так, чтобы максимизировать объём безопасного рабочего пространства. Запуск такого поиска в программном обеспечении выявляет конфигурацию, в которой достигаемое сбалансированное пространство в несколько раз больше, чем в наивном расположении.
Почему это важно для реальных задач
Для неспециалиста ключевая мысль в том, что этого робота можно перестраивать почти как конструктор, но при этом его можно анализировать и настраивать с математической точностью. Комбинируя модульное аппаратное обеспечение с тщательным математическим планированием и компьютерным поиском, авторы превращают одну тросовую машину в универсальную платформу, адаптируемую к множеству задач — от прецизионного производства до реабилитации — при этом максимально используя рабочее пространство и надёжно поддерживая грузы.
Цитирование: Zhao, T., Dai, W., Zheng, F. et al. Reconfigurable analysis and workspace optimization of modular cable-suspended parallel robot. Sci Rep 16, 9210 (2026). https://doi.org/10.1038/s41598-026-37947-4
Ключевые слова: тросовые роботы, модульная робототехника, перенастраиваемые механизмы, рабочий объём робота, параллельные манипуляторы