Clear Sky Science · ru
Распознавание и извлечение параметров кровельных болтов/кабелей в выработках из 3D-точечных облаков на основе MLS
Обеспечение безопасности шахтных тоннелей
Глубокие подземные угольные шахты полагаются на металлические болты и кабели, ввернутые в кровлю выработки, чтобы удерживать породу от обрушения. Если эти элементы крепления установлены неверно или начинают разрушаться, под угрозой оказываются жизни рабочих. Тем не менее сегодня проверка тысяч болтов по‑прежнему во многом выполняется вручную — с рулетками и калибрами, в тёмных, пыльных тоннелях. В этом исследовании предлагается автоматизированный способ «увидеть» и измерить эти скрытые опоры с помощью мобильных лазерных сканеров и 3D‑данных, что обещает более быстрые и объективные проверки безопасности в современных шахтах.
Сканирование тоннеля в трёх измерениях
Исследователи создали портативную систему мобильного лазерного сканирования, специально разработанную для подземных выработок. С установленным лазерным дальномером и датчиками движения устройство несут или толкают по тоннелю, оно быстро посылает лазерные импульсы по окружающей породе. По мере движения навигационная техника, называемая SLAM (одновременная локализация и картографирование), объединяет поступающие измерения в непрерывную 3D‑модель тоннеля. Даже без сигналов GPS, которые не проникают под землю, система способна восстановить форму 50-метрового участка выработки с точностью до сантиметра, захватывая не только поверхности пород, но и элементы крепежа — болты, кабели и стальные пластины.
Очистка цифрового тоннеля
Сырые 3D‑сканы из шахты бывают шумными. Пыль, водяная мгла, рабочие и техника создают лишние точки, загромождающие данные. Команда сначала применяет двухэтапную процедуру удаления шума, которая убирает очевидные выбросы и в то же время восстанавливает реальные поверхности, которые могли быть ошибочно отброшены. Затем они выделяют только кровлю тоннеля, поскольку именно там закреплены болты и кабели. Математически поворачивая данные, они выравнивают кровлю так, чтобы она лежала в стандартной ориентации, что упрощает определение «вверх» и «вниз» и позволяет последовательно измерять направление и длину каждого элемента крепления по всей сцене.
Позволить виртуальной ткани найти болты
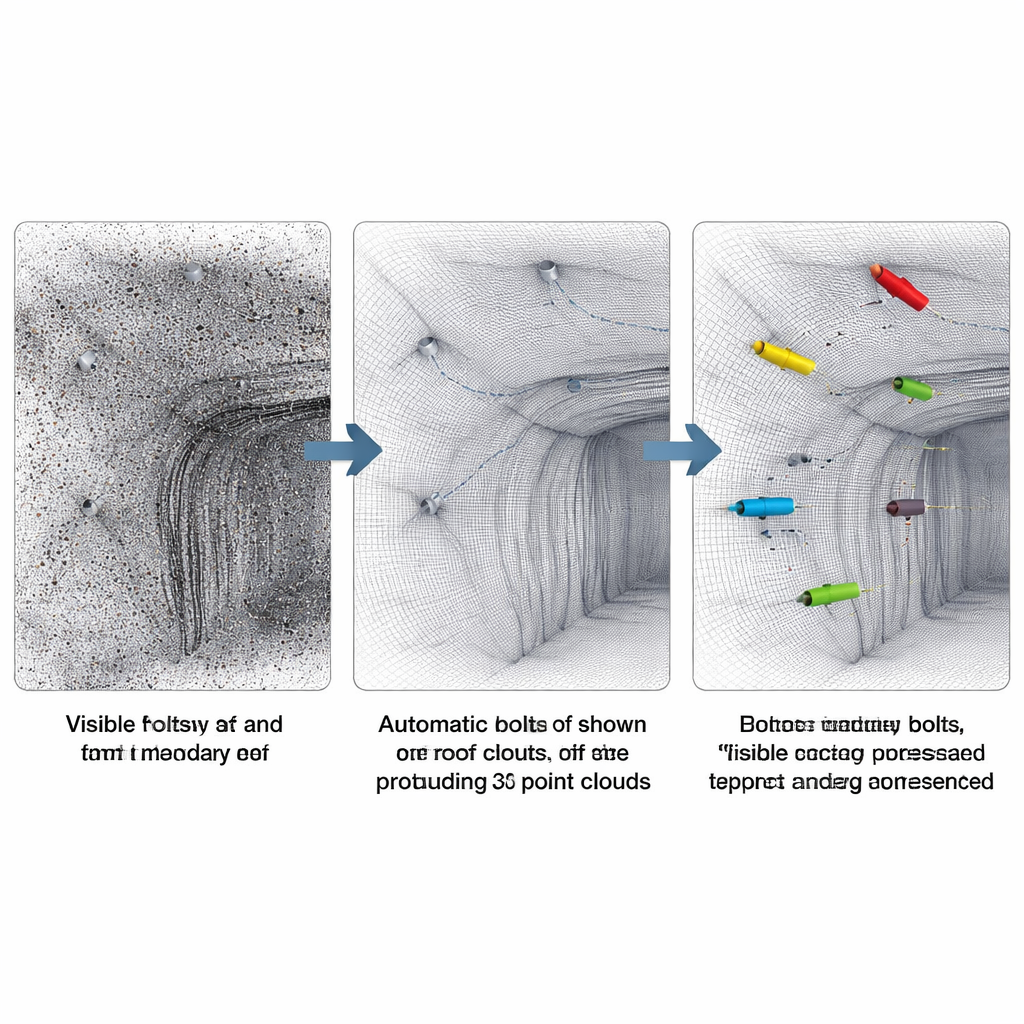
Чтобы отделить поверхность кровли от прикреплённого к ней крепежа, исследователи используют хитрый приём, известный как фильтр имитации ткани (Cloth Simulation Filter). Они представляют себе гибкое полотно, которое медленно оседает под действием гравитации на перевёрнутую цифровую кровлю. Там, где находится сама порода, ткань плотно прилегает к поверхности. Там, где выступают болт, кабель или пластина, ткань драпируется над ними, оставляя зазор. Измеряя небольшую разницу по высоте между полотном и реальными точками, алгоритм помечает, какие точки принадлежат гладкой поверхности кровли, а какие, вероятно, выступающим объектам. Тщательно подобранные параметры делают полотно достаточно детализированным, чтобы следовать естественным неровностям кровли, но не настолько мелким, чтобы оно случайно «поглотило» болты, которые нужно обнаружить.
Обучение компьютера считать и измерять опоры
После того как потенциальные выступы выделены, методу всё ещё нужно решить, какие кластеры точек являются реальными болтами или кабелями, а какие — трубами, свисающими проводами или шумом. Для этого применяется плотностно‑основанная кластеризация, которая группирует близкие точки, образующие вытянутые формы. Алгоритм регулирует радиус поиска и минимальный размер кластера так, чтобы обычный болт как правило становился одним чистым кластером, не сливаясь с соседями. Для каждой группы простейший геометрический анализ находит главную ось объекта и проецирует на неё все точки, что даёт оценку выступающей длины и угла наклона. Дополнительные правила, основанные на известных конструктивных особенностях шахты — такие как типичный шаг установки, ожидаемый диаметр и допустимый угол монтажа — помогают отфильтровывать подделки и оставлять только истинные, правильно установленные опоры.
От 3D‑карт к практическим выводам о безопасности
Метод был протестирован в глубокой угольной шахте в Внутренней Монголии на пяти последовательных сегментах кровли, содержащих 127 болтов и кабелей, вручную тщательно промаркированных. Автоматизированная система корректно обнаружила 118 из них, с несколькими пропусками и ложными срабатываниями, даже в сложных условиях с пылью, частичным покрытием шоткритом и мешающими металлическими деталями. Не менее важно, что она сформировала структурированную базу данных для каждой опоры: её точное местоположение, шаг, длина, выступающая из кровли, и угол по отношению к породе. Для горных инженеров это превращает сложное 3D‑точечное облако в готовый чек‑лист для контроля качества и долгосрочного мониторинга состояния. Хотя подход по‑прежнему зависит от качества сканирования и от того, что хотя бы часть каждого болта должна быть видна, он указывает на будущее, где рутинные проверки безопасности тоннелей могут стать быстрее, чаще и менее зависимыми от субъективной оценки человека.
Цитирование: Ren, Z., Zhu, H., Zhao, L. et al. MLS-based recognition and parameter extraction of roadway roof bolts/cables from 3D point clouds. Sci Rep 16, 6538 (2026). https://doi.org/10.1038/s41598-026-37689-3
Ключевые слова: мобильное лазерное сканирование, 3D-точечные облака, инспекция анкеров, безопасность подземной добычи, мониторинг крепления тоннелей