Clear Sky Science · ru
Планирование траектории с учетом качества для 6-степенных робо-манипуляторов с использованием BiRRT и метаэвристической оптимизации на основе B-сплайнов
Роботы, которые двигаются плавно и безопасно
Промышленные роботы теперь работают в плотном окружении вместе с людьми, инструментами и конвейерами. В таких условиях робот-манипулятор не может просто переместиться из точки A в точку B: он должен сделать это без столкновений, с низким энергопотреблением и без рывков, которые могли бы повредить его самого или соседнее оборудование. В статье описан практический подход к планированию таких аккуратных движений для типичной шестосуставной промышленной руки: грубые, найденные компьютером пути превращаются в плавные, энергосберегающие траектории, которые можно безопасно выполнять на реальном заводском оборудовании.
Почему простое перемещение оказывается сложной задачей
Когда движется робот-рука, нужно одновременно учитывать множество критериев. Траектория должна быть короткой, чтобы задачи выполнялись быстрее; энергопотребление должно быть умеренным, чтобы ограничить нагрев и износ; а движение должно быть достаточно мягким, чтобы рука не дергалась и не вибрировала. Классические подходы проводят через несколько вручную выбранных путевых точек гладкие математические кривые (например, сплайны), что хорошо работает в свободном пространстве, но в захламленных ячейках может становиться неэффективным или даже небезопасным. Новые методы выборки, такие как Rapidly Exploring Random Trees (RRT), хороши в прокладывании пути через сложные поля препятствий, но склонны давать траектории с резкими изгибами, вредными для моторов и редукторов. Авторы утверждают, что ни один из этих семейств методов сам по себе не достаточен; вместо этого они комбинируют их в двухэтапную структуру.
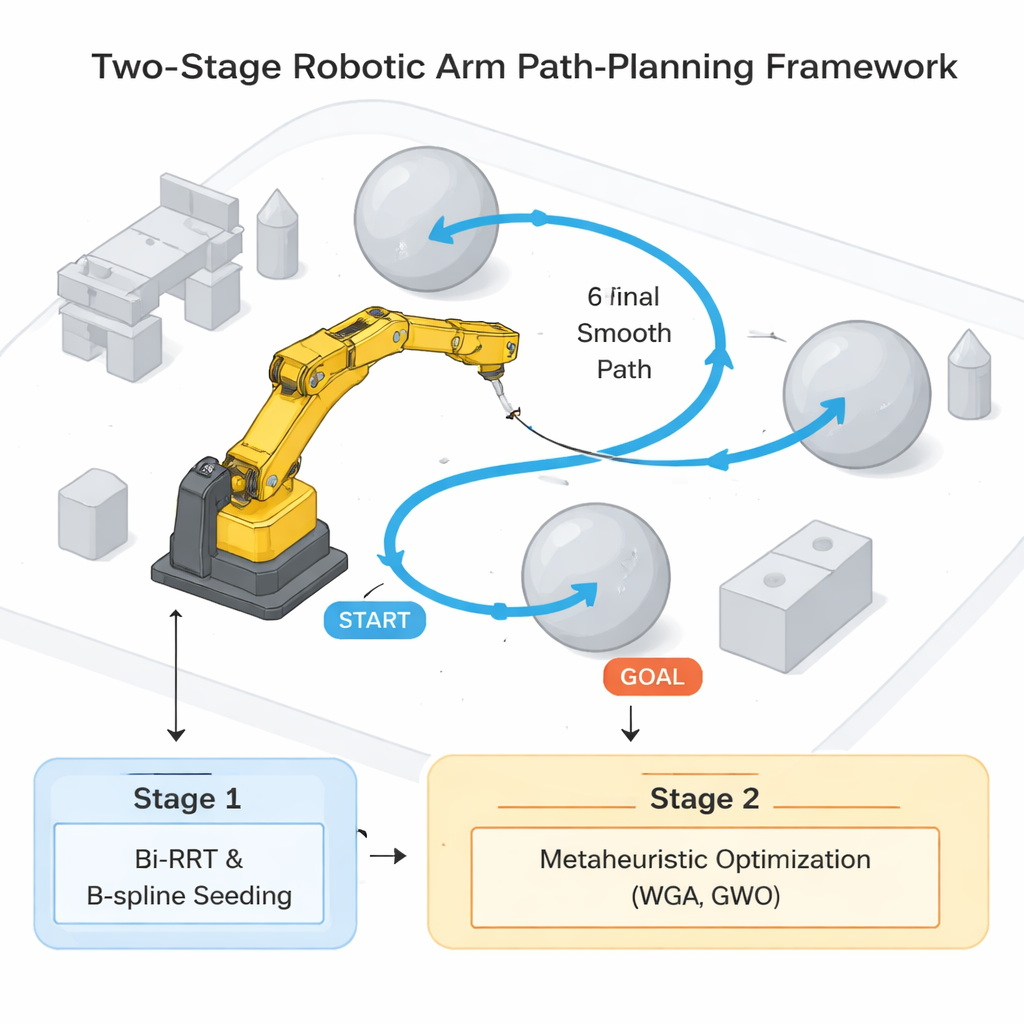
Двухэтапная карта движения робота
На первом этапе команда строит безопасный «опорный маршрут» в пространстве сочленений робота, а не только по положению «хвата» в пространстве. Они начинают с гладкой B-сплайн кривой, соединяющей начальную и целевую позиции и обходящей сферические препятствия с запасом безопасности. Эта кривая затем направляет двунаправленный RRT (Bi-RRT), который растит два случайных дерева — от старта и от цели — пока они не встретятся в без столкновений путь. По ходу каждое предполагаемое движение всей руки проверяется относительно упрощенных форм препятствий. После нахождения пути избыточные изгибы удаляются методом «коротких сокращений» (short-cutting), а результат повторно представляется как сплайн с параметризацией по времени, который робот, в принципе, мог бы следовать.
Обучение робота двигаться мягче
Второй этап берёт этот допустимый, но несовершенный путь и оптимизирует его по качеству. Авторы используют два натуралистически вдохновлённых метода оптимизации: гибридный алгоритм Кит–Генетический (WGA) и оптимизатор «серого волка» (GWO). Оба действуют на ограниченное число контрольных точек и временных параметров вдоль исходного сплайна, но им разрешено перемещать эти точки лишь внутри предварительно вычисленных безопасных коридоров вокруг пути. Каждое кандидатное движение оценивается по единой комбинированной метрике, которая включает три компонента: расстояние, пройденное «хватом» робота; потребляемую энергию на уровне сочленений (на основе характеристик каждого мотора); и «рывистость» движений — насколько быстро меняются ускорения сочленений во времени. Повторяя предложение, проверку и улучшение кандидатных траекторий, оптимизаторы ищут движения, которые остаются без столкновений, но значительно более плавные и готовые к исполнению.
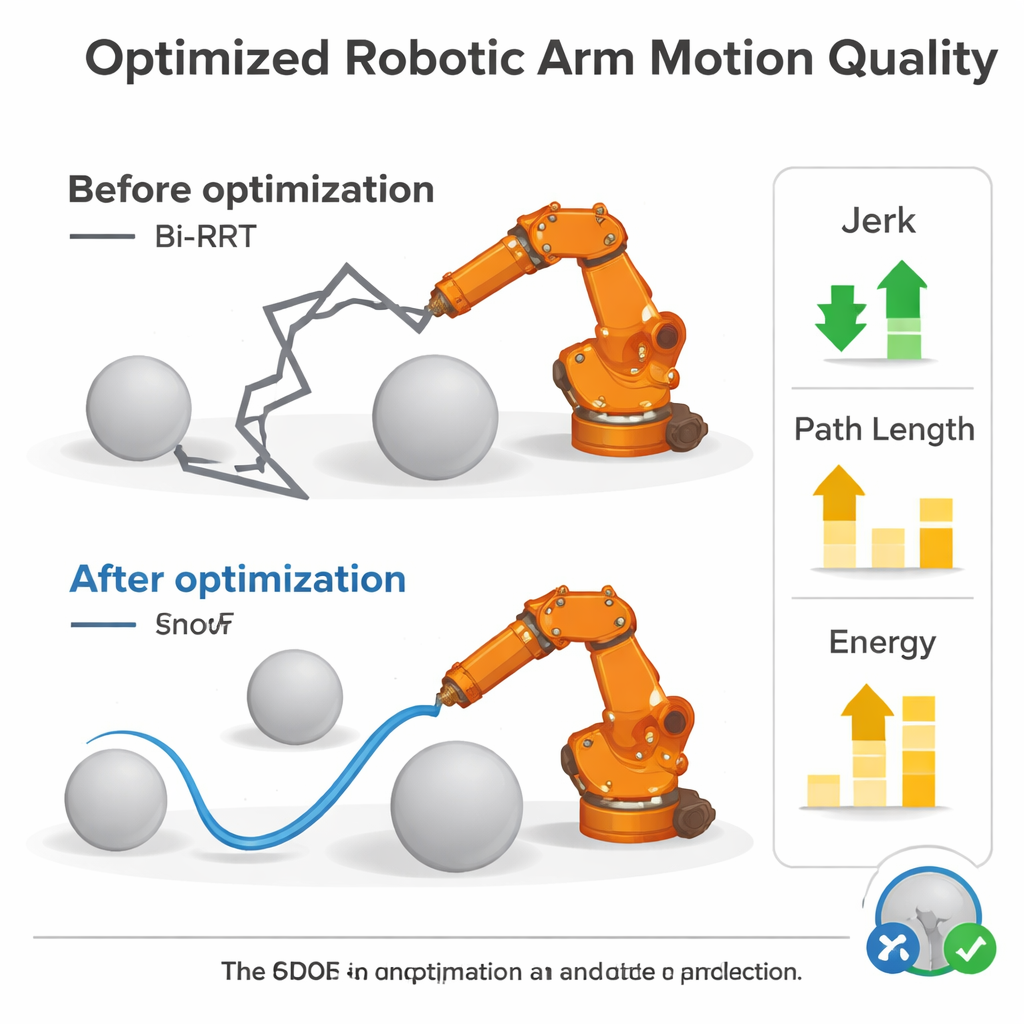
Что показывают симуляции
Авторы проверяют свою схему на цифровой модели широко используемой промышленной руки KUKA KR 4 R600, перемещающейся через сцену с тремя препятствиями за фиксированные два секунды. Чисто сплайновое решение уже достаточно плавное, но не использует систематически все возможные безопасные маршруты. Bi-RRT с коротким сокращением находит путь сопоставимой геометрической длины и даже с меньшим энергопотреблением, но с серьёзным недостатком: его индекс рывка — показатель того, насколько резко меняются ускорения сочленений — примерно в десять раз выше, что указывает на движение, вероятно возбуждающее вибрации и создающее нагрузки в реальной машине. После применения WGA или GWO индекс рывка сокращается примерно на 94–96 процентов по сравнению с необработанным Bi-RRT путём. Это драматическое сглаживание достигается ценой лишь умеренного увеличения длины пути (около 15–17 процентов) и энергии (примерно вдвое), компромисс, который, как утверждают авторы, вполне оправдан для реального оборудования.
От теории к заводскому цеху
Для неспециалиста главное: авторы предлагают конкретный рецепт — и инструменты на базе MATLAB — для превращения первого, грубого представления робота о том, как двигаться, в отшлифованное, пригодное для аппаратного исполнения движение. Их подход сначала гарантирует, что маршрут существует в захламленной среде, затем перестраивает этот маршрут так, чтобы рука двигалась с меньшим количеством толчков, при этом соблюдая все ограничения сочленений и зазоры. В результате получается набор движений, которые реальный промышленный робот может выполнять более безопасно и надежно, что закладывает основу для будущих расширений, где роботы будут делить рабочие зоны с людьми и адаптировать свои движения в реальном времени с помощью камер и даже интерфейсов, считывающих сигналы мозга.
Цитирование: Elgohr, A.T., Rashad, M., El-Gendy, E.M. et al. Dynamic quality aware path planning for 6 DoF robotic arms using BiRRT and metaheuristic optimization based on B spline paths. Sci Rep 16, 7487 (2026). https://doi.org/10.1038/s41598-026-37676-8
Ключевые слова: планирование траектории робота, промышленный робот-манипулятор, избежание столкновений, плавность движения, метаэвристическая оптимизация