Clear Sky Science · ru
Когнитивные модели облегчают вывод скрытых мотивов в реальном времени
Почему важно угадывать скрытые цели
Каждый день вы незаметно читаeте намерения окружающих — собирается ли водитель перестроиться в вашу полосу, остановится ли велосипедист или коллега пытается помочь или соперничать. Эти моментальные суждения опираются на интерпретацию скрытых мотивов по видимым движениям. Современный искусственный интеллект может быть чрезвычайно точным в предсказании, но часто действует как «черный ящик», не объясняя, почему он принял то или иное решение. В этом исследовании спрашивают, могут ли психологические модели человеческого поведения дать ИИ более человечное представление о мотивах других, сделав его быстрее, точнее и более заслуживающим доверия.
Простая игра преследования и уклонения
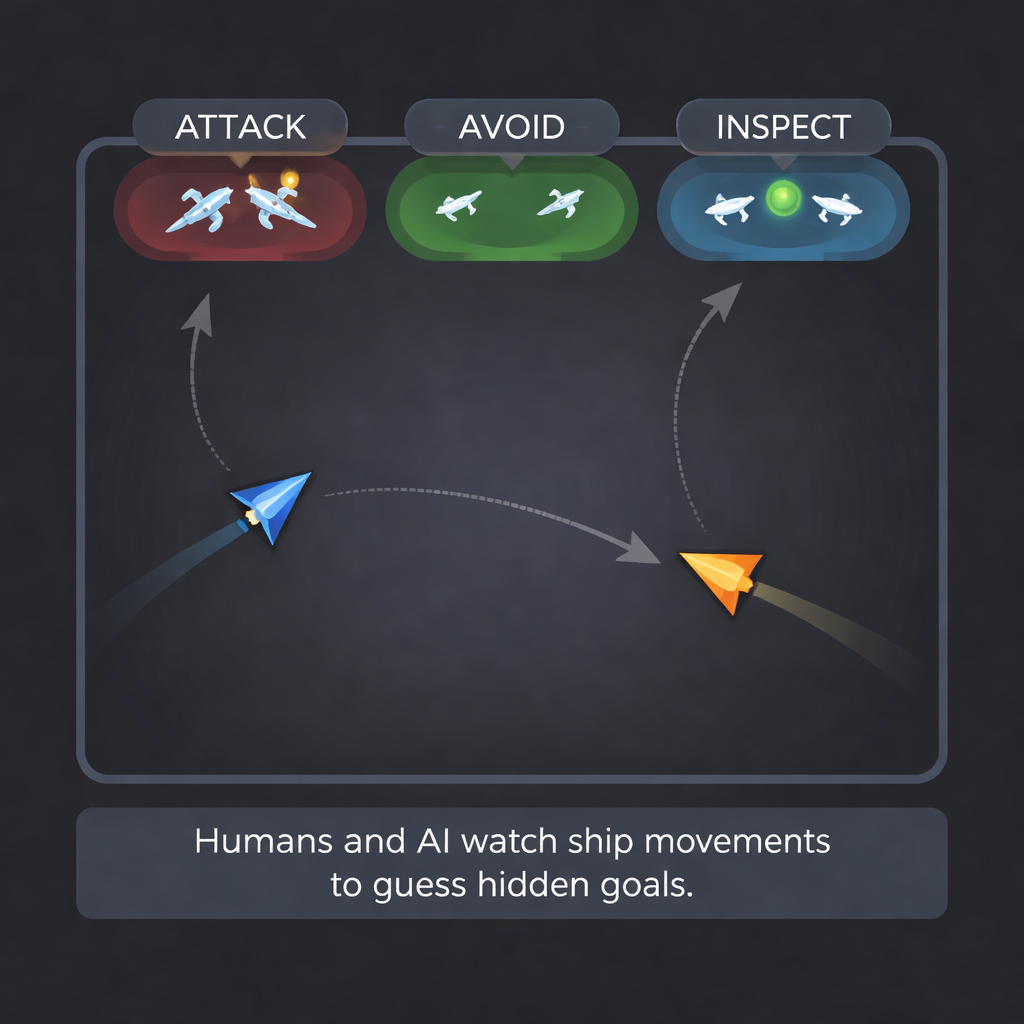
Чтобы изучить это, исследователи создали упрощенную видеоигру. В каждом 10-секундном раунде человек управлял треугольным «кораблем» с помощью джойстика, пока компьютерный корабль двигался по одному из нескольких шаблонов. Человеку тайно назначали одну из трех целей: Атаковать (столкнуться с другим кораблем), Избегать (держаться далеко) или Осматривать (находиться рядом, не сталкиваясь). Компьютерный корабль мог вести себя агрессивно, застенчиво, любопытно, оборонительно или просто блуждать. Эти комбинации создавали ситуации, где движения кораблей либо совпадали, либо противоречили друг другу — например, атакующий человек преследует застенчивый компьютерный корабль, который постоянно пытается убежать.
Оценка того, насколько хорошо люди читают скрытые цели
Первым шагом было выяснить, насколько сами люди умеют считывать мотивы по движению. Команда взяла игровой материал от восьми лучших пилотов и превратила каждый раунд в короткое видео. Новые добровольцы смотрели эти клипы и должны были угадать цель человеческого игрока — атаковать, избегать или осматривать — увидев только 1, 4, 7 или 10 секунд движения. В разных группах, включая участников с диагнозом аутизма и без него, люди правильно определяли цель примерно в двух третях случаев. Точность росла по мере просмотра большего фрагмента раунда, и результаты были схожи в разных группах, что дало надежную человеческую контрольную точку для сравнения.
Психологическая модель движения
Вместо того чтобы подавать необработанные видеоданные напрямую в нейросеть, авторы построили когнитивную модель, фиксирующую силы, которые могут управлять поведением игрока. Их модель «повсеместно-локальное стремление к цели» (GLOP) предполагает, что игрок одновременно балансирует несколько влечений: поддержание предпочитаемой дистанции от противника (слишком близко — опасно, слишком далеко — упускаются возможности), удержание выгодных позиций на экране, а не оказание в ловушке в углу, а также согласование или предвидение скорости и направления другого корабля. Эти факторы объединяются в единое «мотивационное» направление движения, с добавлением членов, отражающих плавность движений и степень случайности в управлении.

Обучение ИИ читать мысли по движению
Чтобы сделать модель полезной в реальном времени, исследователи сымитировали 100 000 раундов игры с различными настройками параметров GLOP. Затем они обучили рекуррентную нейросеть принимать последовательности позиций кораблей и быстро оценивать скрытые параметры — например, предпочитаемую дистанцию или силу привязки к глобальной позиции. Эта сеть могла очень точно восстановить несколько ключевых параметров всего за несколько секунд движения. Далее они обучили набор классификаторов, которые угадывали цель игрока тремя разными способами: непосредственно по необработанным данным о позициях, по простым сводным статистикам (например, средняя дистанция и приближение против отдаления) или по выведенным параметрам когнитивной модели. Наконец, они создали «ансамблевые» классификаторы, объединяющие эти источники.
Превосходство над человеческим эталоном
Все классификаторы ИИ соответствовали или превосходили человеческую производительность, но важно было, как подготовлена информация. Сети, опиравшиеся только на сырые движения или только на параметры модели, показывали результат, сопоставимый с людьми, примерно 66% точности. Классификаторы, снабженные простыми статистиками, работали лучше, а наилучшие результаты обеспечивались сочетанием этих статистик с параметрами когнитивной модели — около 72% точности. Эти системы, информированные моделью, также обучались быстрее и стабильнее, чем те, которым подавали только сырые данные. При отслеживании точности по моментам в каждом раунде ИИ мог обновлять предположение о скрытой цели игрока быстрее, чем интервал между обновлениями экрана, фактически делая вывод о намерении в реальном времени.
Что это значит для повседневного ИИ
Для непрофессионала вывод таков: интеграция психологической теории в ИИ помогает машинам понимать не только что люди делают, но и почему они это делают. Переводя беспорядочные движения в небольшой набор интерпретируемых мотивов — например, насколько близко человек хочет находиться или как он балансирует безопасность и возможности — система становится и точнее, и проще для объяснения. В будущих приложениях, таких как автономные автомобили или команды человек–ИИ, такой «когнитивный интерфейс» может помочь ИИ раньше и надежнее предсказывать намерения других агентов, потенциально предотвращая столкновения и недоразумения и одновременно предоставляя удобные для человека объяснения вроде «другой водитель, вероятно, пытается перестроиться, а не просто съезжает с курса».
Цитирование: Fitch, A.K., Kvam, P.D. Cognitive models facilitate real-time inference of latent motives. Sci Rep 16, 6444 (2026). https://doi.org/10.1038/s41598-026-37587-8
Ключевые слова: теория разума, когнитивное моделирование, вывод намерений, взаимодействие человека и ИИ, объяснимый ИИ