Clear Sky Science · ru
Безопасное масштабирование формации и планирование движения для разнородных команд БЛА–БПЛ (БПЛА–Наземных роботах) в зашумлённых средах
Роботы, которые работают вместе в воздухе и на земле
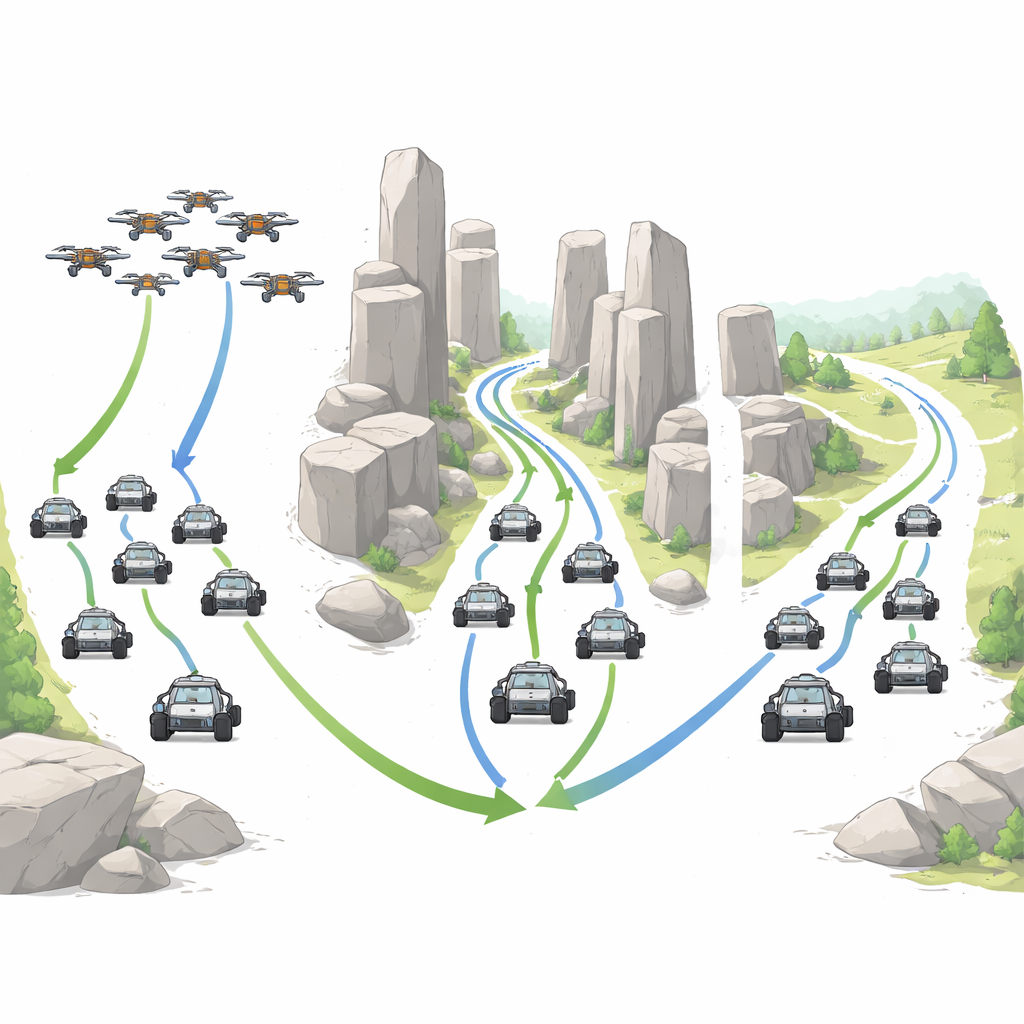
Представьте рой небольших летающих дронов, обследующих зону бедствия сверху, в то время как прочные наземные транспортные средства пробираются по завалам внизу — все они движутся как единая скоординированная команда. В этой статье рассматривается, как удерживать такие смешанные группы роботов вместе в плотных, заполненных препятствиями пространствах без столкновений и без частого срочного перепланирования. Авторы предлагают новый способ, который позволяет воздушным и наземным роботам сохранять устойчивую формацию, протискиваться через узкие проходы и при этом быстро и безопасно достигать цели.
Почему координировать смешанные команды роботов сложно
Летающие дроны и колесные наземные машины ведут себя очень по-разному. Дроны маневрируют в трёхмерном пространстве и легко сносятся ветром. Наземные машины вынуждены соблюдать ограничения на повороты и учитывать неровности местности. Тем не менее многие реальные задачи — от поиска и спасения до инспекции инфраструктуры — выиграли бы, если бы эти роботы могли двигаться вместе как единая трёхмерная группа. Существующие методы часто рассматривают поддержание формации и избегание препятствий по отдельности. В плотной среде формации склонны распадаться и затем заново собираться, что тратит время и повышает риск столкновений.
Новый подход к сохранению целостности группы
Чтобы решить эту проблему, авторы разработали фреймворк, названный RG–ASAPF, который тесно связывает формуцияние и движение. В его основе математическое описание формации как «жёсткой» структуры: желаемые расстояния между роботами выбираются так, чтобы общая форма была однозначно определена, как стержни стабильного трёхмерного каркаса. Каждый робот затем использует общее правило для корректировки своего движения так, чтобы эти расстояния восстанавливались и поддерживались, даже когда формация перемещается и поворачивается. Это правило разработано так, чтобы работать и для летающих, и для наземных роботов, и оно адаптируется в режиме онлайн к неопределённостям, таким как немоделированное трение или небольшие внешние воздействия.
Давать формации «дышать» в узких пространствах
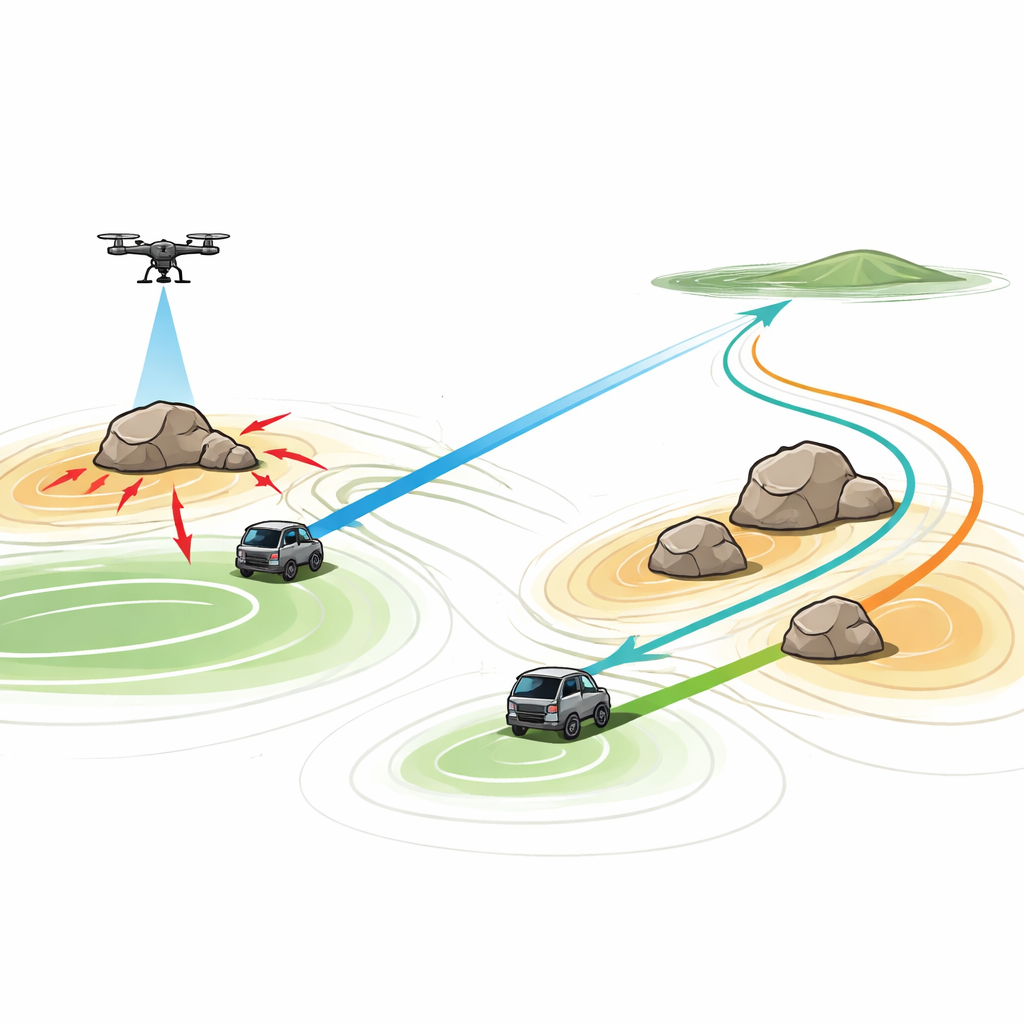
Реальные среды редко представляют собой открытые поля; они заполнены зданиями, деревьями, транспортом и движущимися объектами. Формация, безопасная в открытом пространстве, может оказаться слишком крупной, чтобы пройти через узкий переулок или плотную группу препятствий. Предложенный метод позволяет формации плавно масштабироваться — сжиматься или расширяться в целом — сохраняя при этом базовую структуру. Команда вводит лидирующий наземный автомобиль, который прокладывает путь с использованием искусственного потенциального поля, где цель действует как притягивающий центр, а препятствия отталкивают формацию. В отличие от традиционных потенциальных полей, которые могут застревать в тупиках или вызывать дрожание движения, их «адаптивная безопасная» версия непрерывно настраивает силу отталкивания препятствий, чтобы поддерживать безопасную дистанцию без излишней осторожности или захвата в ловушку.
Более умные маршруты сквозь завалы и движение
Потенциальное поле дополнительно уточняется так, чтобы общая «поверхность» притяжения и отталкивания всегда имела свою наинизшую точку в цели. Это помогает предотвратить застревание формации в неудобных местах между препятствиями. Сила отталкивания регулируется в реальном времени с помощью простого правила обучения, заимствованного из ранних методов обучения нейронных сетей. Когда роботы слишком приближаются к препятствиям, отталкивание автоматически увеличивается; при достаточном зазоре — ослабевает. Если среда становится настолько узкой, что даже уменьшенная формация не может пройти безопасно, метод активирует запасной план: команда временно останавливается, расширяет условный коридор безопасности и перепланирует более безопасный маршрут вокруг проблемной зоны перед продолжением движения.
Тестирование в виртуальных мирах
Чтобы оценить эффективность метода, авторы провели обширные компьютерные симуляции со смешанными командами дронов и наземных машин. Они тестировали открытые участки с несколькими препятствиями, плотные лабиринты с множеством барьеров, сцены с движущимися препятствиями и формации, которые должны были трансформироваться в более сложные 3D‑формы, такие как шестиугольная призма. Во всех этих случаях формация держалась вместе в трёх измерениях, безопасно избегала статических и движущихся препятствий и при необходимости регулировала свой размер. Роботы следовали плавным, эффективным траекториям, а не зигзагообразно огибали барьеры. По сравнению с несколькими популярными методами планирования — включая классические и улучшенные потенциальные поля, оптимизацию роя частиц и как линейное, так и нелинейное модельно‑предиктивное управление — новый подход находил маршруты, которые обычно были короче, плавнее и менее энергозатратны, при этом вычислял их быстрее, чем тяжёлые методы на основе оптимизации.
Что это значит для реальных миссий
Для неспециалиста ключевая идея такова: статья демонстрирует, как заставить смешанные команды летающих и наземных роботов двигаться как единое гибкое тело через загромождённые трёхмерные пространства. Вместо распада формации при появлении препятствий группа может изгибаться, сжиматься и переориентироваться, оставаясь при этом связной и безопасной. Это может привести к более быстрому и надёжному сопровождению роботов во время бедствий, при промышленных инспекциях и патрулировании безопасности. Хотя текущее исследование показано в симуляциях и опирается на назначенного лидера, авторы очерчивают дальнейшие шаги на пути к более отказоустойчивым командам и реальным экспериментам, приближая концепцию скоординированных воздушно‑наземных роёв роботов к практике.
Цитирование: Chen, Q., Liu, X., Nie, W. et al. Safe formation scaling and motion planning for heterogeneous UAV–UGV teams in cluttered environments. Sci Rep 16, 9127 (2026). https://doi.org/10.1038/s41598-026-37211-9
Ключевые слова: формирование многоагентной системы, взаимодействие БЛА и наземных роботов, избежание препятствий, планирование движения, ройная робототехника