Clear Sky Science · ru
Экзоскелет для телеприсутствия верхней конечности с бесступенчатой параметризацией длины руки и адаптивным импедансным смешением, активируемым по силе
Безопасная работа руками на безопасном удалении
Многие из самых опасных работ на Земле — и в космосе — по‑прежнему требуют человеческого суждения и ловкости. Речь о ремонте повреждённой атомной установки, обращении с взрывчатыми веществами или стабилизации космического аппарата. В этой работе представлен новый тип приводного экзоскелета для руки, который позволяет человеку управлять удалённой роботизированной рукой как собственной, оставаясь при этом вдали от опасности. Устройство ориентировано на то, чтобы робот двигался и «ощущался» как естественное продолжение тела носителя, при этом подстраиваясь под разную длину рук и изменяющиеся силы во внешней среде.
Почему удалённые руки важны
Роботы уже работают под водой, в зонах бедствий и внутри реакторов, но большинство из них либо заранее запрограммированы, либо управляются простыми джойстиками. Это ограничивает их возможности при внезапных изменениях условий. Системы телеприсутствия — где человек управляет удалённым роботом в реальном времени — предлагают средний путь, объединяя человеческое принятие решений с механической силой и досягаемостью робота. Ранние системы могли перемещать инструменты, но часто им не хватало точной информации о силах и возможности легко подстраиваться под разные тела пользователей. В результате движения были неуклюжими, «ощущение» посредственным, а оператор и машина испытывали дополнительную нагрузку.
Носимый робот для руки, который действительно подходит
Команда создала носимый экзоскелет верхней конечности с семью приводными сочленениями, выровненными по плечу, локтю и запястью. Лёгкие материалы, такие как углепластик и алюминий, сохраняют устройство отзывчивым, а не тяжёлым и вялым. Важной инновацией является то, что длина верхней и предплечья экзоскелета может плавно регулироваться, а не фиксироваться в нескольких положениях. Скользящие направляющие с встроенными электрическими датчиками непрерывно измеряют фактическую длину руки носителя и передают эти данные в цифровую модель тела. В результате устройство автоматически меняет внутреннюю геометрию под конкретного человека, повышая комфорт и делая движения робота более верными намерениям пользователя. 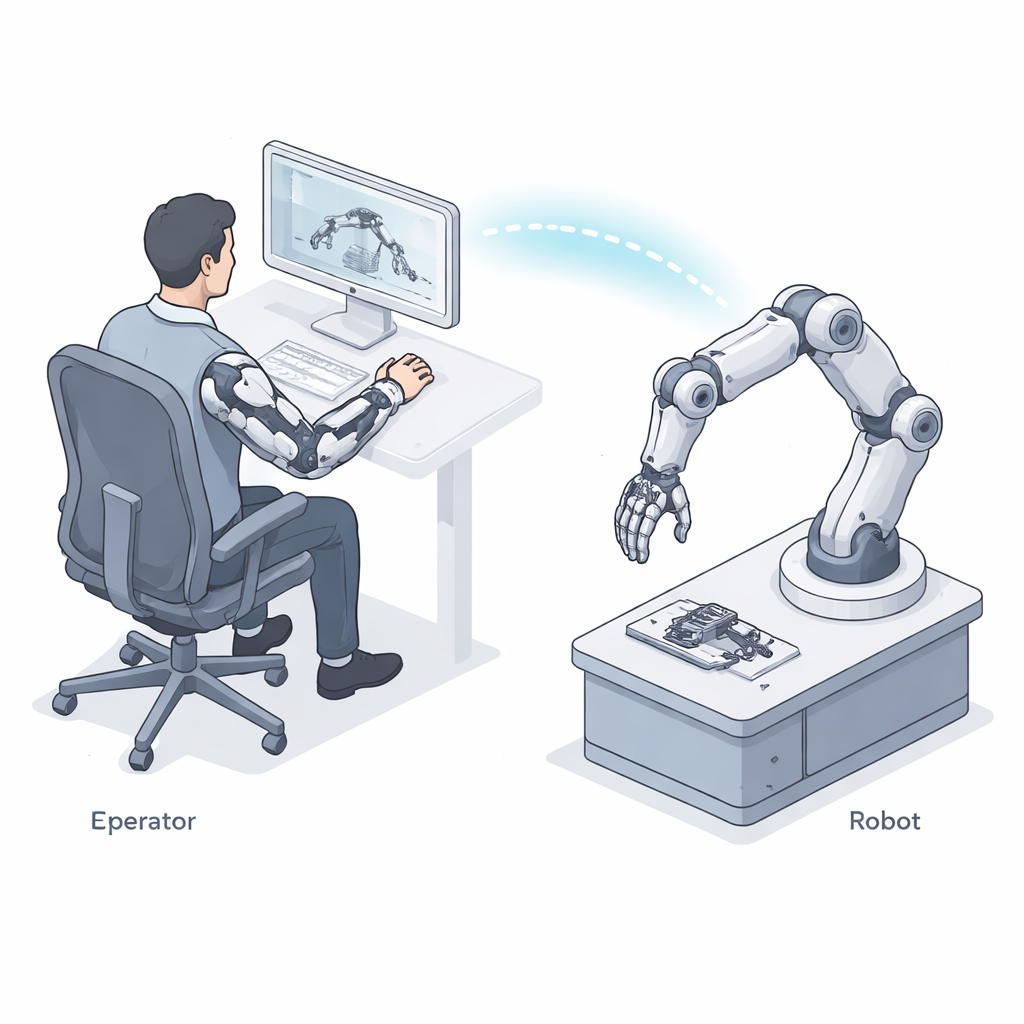
Движение в унисон с телом, а не против него
Плечо человека не просто вращается как шарнир; лопатка также скользит по грудной клетке. Многие экзоскелеты этого не учитывают и в итоге препятствуют естественным движениям, вызывая дискомфорт. В этой конструкции добавлен пассивный модуль с несколькими дополнительными степенями свободы, который мягко следует за тонкими смещениями плеча и верхней части тела, снижая давление на кожу и суставы. Одновременно приводные сочленения настроены так, чтобы их крутящий момент — сила вращения — оставался ниже безопасных пределов для тканей человека. Аварийные остановки и датчики заедания дополняют функции безопасности, позволяя системе быстро среагировать в случае неполадок.
Более умный способ ощущать контакт
Помимо механики, авторы уделяют внимание тому, что чувствует носитель. Когда удалённый робот касается или толкает что‑то — стену, рукоятку инструмента или другой предмет — эти силы передаются обратно через экзоскелет, так что пользователь ощущает сопротивление. Система управления сочетает два обычно противоречащих требования: точное отслеживание движений оператора и мягкое, комплаентное поведение при возрастании контактных сил. При низких силах система действует жёстко и точно, тесно повторяя траекторию руки носителя. По мере того как силы превышают порог безопасности, управление автоматически «смягчается», позволяя некоторую податливость, чтобы удары были амортизированы, а не резки. Авторы используют энергетические математические методы, чтобы показать, что такое смешанное поведение остаётся стабильным и не скатывается в колебания. 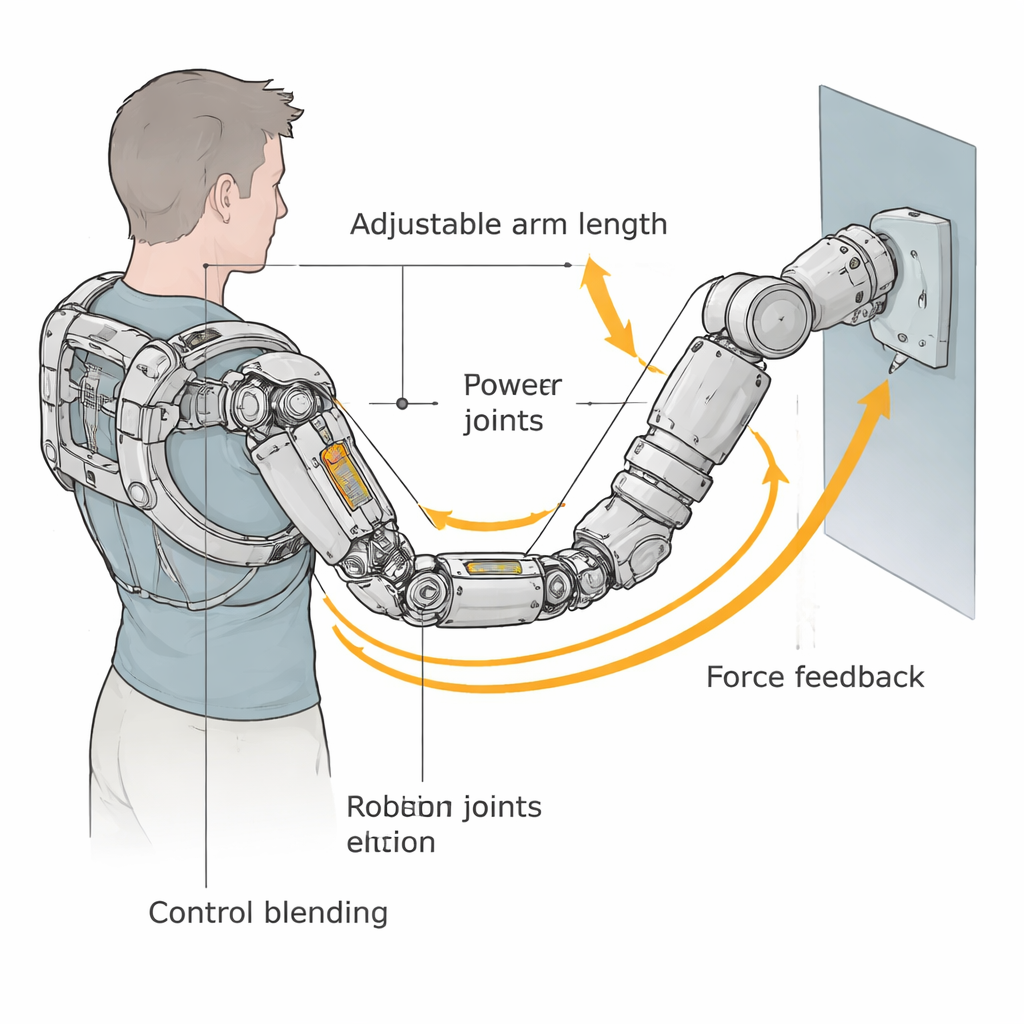
Испытания системы
Для оценки экзоскелета исследователи подключили его к широко используемой промышленной роботизированной руке. Когда человек в экзоскелете водил рукой по восьмёрке в воздухе, удалённый робот воспроизводил движение достаточно точно, несмотря на небольшие задержки связи. Дополнительные тесты проверяли работу измерения длины руки: показания напряжения со скользящих датчиков совпадали с физическими замерами с погрешностью менее нескольких миллиметров, даже после многократного надевания и снятия. В контролируемых моделях, где робот нажимал на виртуальную жёсткую стену, полная схема управления снизила пиковые контактные силы почти на 70 процентов по сравнению с базовой конфигурацией, при этом в значительной степени сохранив точность отслеживания в свободном движении.
Что это означает для реальной работы и ухода
В повседневных терминах это исследование приближает нас к удалённым роботам, которыми управлять так же естественно и безопасно, как собственной рукой. Комбинация прилегающей регулируемой рамы, тщательного отслеживания человеческих движений и интеллектуальной обратной связи по силам, адаптирующейся на ходу, обещает более точное и менее утомительное телеприсутствие в опасных условиях. Та же технология может служить и пациентам, восстанавливающимся после инсульта, позволяя терапевтам направлять и записывать движения руки, пока пациенты получают реалистичную помощь и обратную связь. По мере того как будущие версии будут интегрировать сигналы от мышц и направления взгляда и учиться на опыте, такие пары экзоскелет — робот могут стать универсальными инструментами как для экстремальных миссий, так и для повседневной реабилитации.
Цитирование: Zeng, P., Xu, Y., Zheng, S. et al. An upper-limb teleoperation exoskeleton with stepless arm-length parameterization and adaptive force-triggered impedance blending. Sci Rep 16, 7529 (2026). https://doi.org/10.1038/s41598-026-37205-7
Ключевые слова: экзоскелет для телеприсутствия, управление роботизированной рукой, обратная силовая связь, реабилитационная робототехника, удалённые опасные операции