Clear Sky Science · ru
Оценка уровня заряда батареи в реальном времени и автономная стратегия подзарядки для робота с динамической зарядкой энергохранилища на основе расширенного фильтра Калмана
Почему умные аккумуляторы для роботов важны
От складских курьеров до инспекционных роботов — мобильные роботы полезны ровно настолько, насколько это позволяет их батарея. Если робот неверно оценивает оставшуюся энергию, он может остановиться далеко от зарядной станции, прервав работу и подвергнув аккумулятор риску повреждения. В этой статье предложен новый способ, позволяющий роботу в реальном времени «знать» свой реальный уровень заряда и выбирать, когда и как подзаряжаться, чтобы работать дольше, безопаснее и с меньшим участием человека.

Роботы, интенсивные задачи и напряжённые батареи
В отличие от электромобилей, которые едут ровно по шоссе, многие мобильные роботы сталкиваются с резкими стартами и остановками и частыми изменениями нагрузки. Эти рывки вызывают быстрые колебания тока и напряжения батареи, что сбивает с толку традиционные методы оценки оставшегося заряда. Простые подходы, опирающиеся на измерение напряжения или интеграцию тока по времени, как правило, предполагают спокойные, стабильные условия и не учитывают старение или нагрев аккумулятора. В результате их оценки дрейфуют, накапливаются ошибки, и робот может либо слишком часто подзаряжаться, либо эксплуатировать батарею чрезмерно, сокращая её срок службы.
Более точная модель того, что происходит внутри батареи
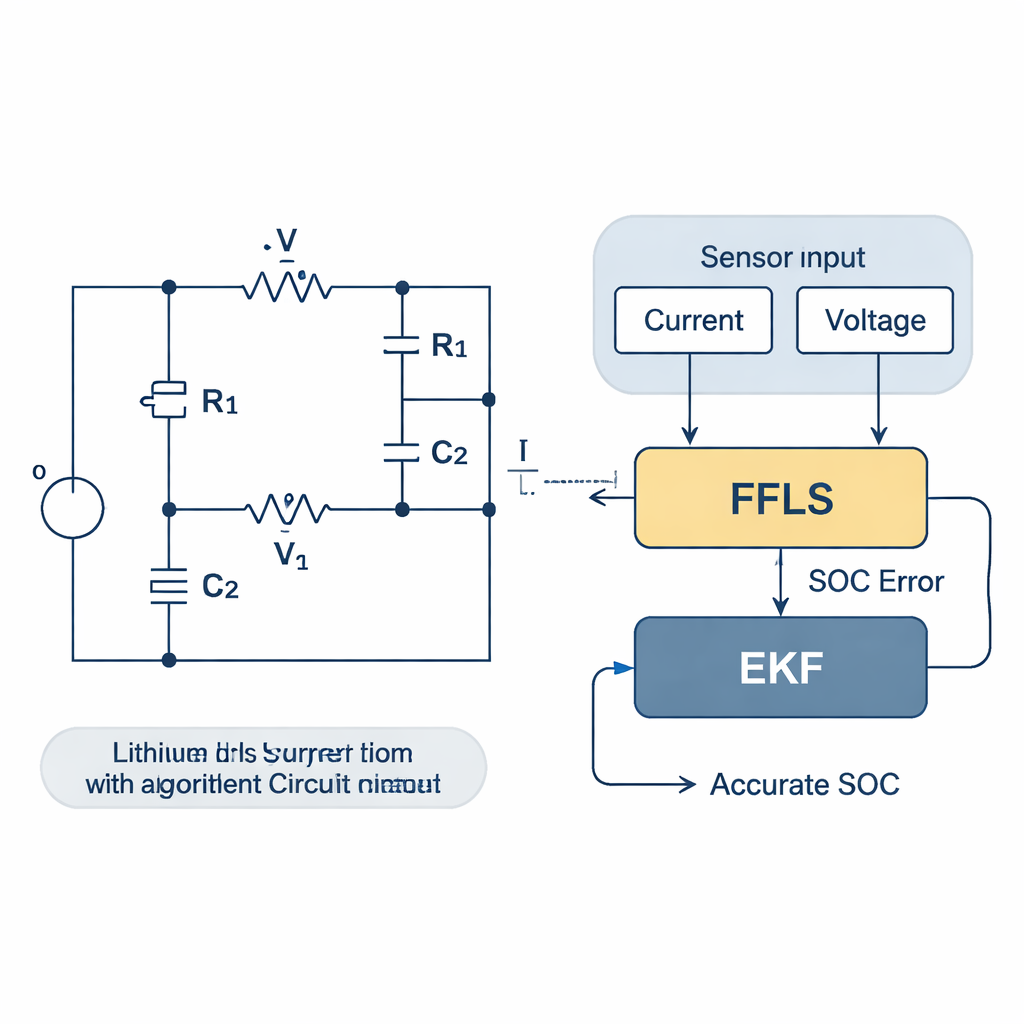
Авторы решают эту проблему, снабдив робота более реалистичной моделью батарейного блока на основе литий‑железо‑фосфатной химии. Вместо того чтобы рассматривать батарею как «чёрный ящик» с одним числом напряжения, они моделируют её как электрическую сеть с внутренним сопротивлением и двумя «поляризационными» ветвями, имитирующими движение и накопление ионов внутри ячейки. Эта модель второго порядка RC отражает быстрые и медленные отклики на изменение нагрузки. Робот непрерывно измеряет ток и напряжение и подгоняет эти сигналы под модель с помощью метода наименьших квадратов с «фактором забывания» — математическим приёмом, дающим больший вес недавним данным и ослабляющим влияние устаревшей истории при смене условий.
Позволяя алгоритму учиться и адаптироваться на ходу
Поверх этой модели команда применяет расширенный фильтр Калмана, широко используемый инструмент для отслеживания скрытых состояний в зашумлённых данных. Здесь скрытое состояние — истинный уровень заряда батареи. В процессе работы робот фильтр предсказывает изменение заряда на основе модели и измеренного тока, затем корректирует предсказание по измеренному напряжению. Модуль МНК с фактором забывания постоянно обновляет ключевые параметры модели онлайн, так что фильтр не опирается на устаревшее, заводское описание батареи. Умно, что исследователи также используют связь между внутренним сопротивлением и величиной, называемой поляризационной ёмкостью: с ростом температуры сопротивление падает, а ёмкость растёт. Наблюдая обе величины вместе, система может выводить температурные эффекты без физического датчика температуры и соответственно корректировать модель.
Обучение робота, когда и как подзаряжаться
Точные оценки заряда — лишь половина дела; другая половина — как робот ими пользуется. Авторы разрабатывают автономную стратегию подзарядки, которая избегает как постоянного «дополняения», так и глубоких разрядов. Они задают верхний и нижний пределы заряда: если батарея опускается ниже порога, робот ставит приоритет на возвращение к док-станции; если заряд уже близок к верхнему пределу, подзарядку откладывают и продолжают работу. В пределах безопасного диапазона робот подзаряжается в моменты простоя. Система также следит за каждой ячейкой в батарейном блоке и балансирует их заряды, чтобы ни одна ячейка не была переполнена, пока другие отстают — это ключевой шаг для предотвращения преждевременного старения. Для повышения эффективности стыковки робот сочетает навигацию на уровне помещения с ближним инфракрасным наведением, что сокращает маршруты и время докирования.
Длительная и более надёжная батарейная энергия для роботов
В испытаниях на публичных наборах данных по батареям, в симуляциях и на реальных роботах новый метод оценивал состояние заряда с примерно 98% точностью, заметно превзойдя несколько современных альтернатив на основе фильтров частиц, нейронных сетей и трансформеров. Батареи, управляемые этим подходом, лучше сохраняли заряд в течение недель имитируемой эксплуатации и выдержали на 15–40% больше циклов заряд‑разряд по сравнению с конкурирующими методами. Внутреннее сопротивление увеличивалось медленнее, что свидетельствует о лучшем состоянии ячеек, а роботы проводили меньше времени у док-станций при сохранении более здоровых батарей. Для неспециалиста вывод простой: эта техника позволяет роботам лучше «ухаживать» за собственными батареями — точнее оценивать энергию, выбирать более разумные моменты для подзарядки и незаметно продлевать срок службы дорогостоящих батарей без дополнительных датчиков или тяжёлых вычислений.
Цитирование: Zhou, Y., Liang, X., Li, W. et al. Real time estimation of battery SOC and autonomous charging strategy for dynamic energy storage charging robot with extended Kalman filter. Sci Rep 16, 7810 (2026). https://doi.org/10.1038/s41598-026-37184-9
Ключевые слова: мобильные роботы, состояние заряда батареи, автономная подзарядка, расширенный фильтр Калмана, литий-железо-фосфатные батареи