Clear Sky Science · ru
Динамическая цепочка для планирования расписания многомашинных AGV-систем с учетом нагрузки в профиле движений
Почему складским роботам нужно лучшее времяпланирование
Онлайн-шопинг наполнил склады товарами, которые нужно перемещать быстро, безопасно и круглосуточно. Многие объекты уже полагаются на флоты наземных роботов — автоматизированных транспортных средств (AGV), которые перевозят стеллажи и поддоны. Но если расписание этих роботов строится на упрощенных представлениях об их движении, это может приводить к потере времени, встряскам хрупких грузов или даже риску столкновений. В этой статье предлагается новый способ планирования и координации множества AGV одновременно с учётом их реального физического поведения, что обещает более плавное движение и безопасную перевозку грузов в загруженных складах.
Роботы, которые перевозят грузы, а не просто считаются
Современные AGV уже курсируют по складам, аэропортам и фабрикам, буксируя тележки или поднимая стеллажи и поддоны. Большинство существующего программного обеспечения для управления этими флотами работает на высоком уровне: оно решает, какой робот должен выполнить задачу и примерно по какому маршруту. Чтобы упростить расчеты, обычно принимается, что время движения между двумя точками фиксировано, без учёта того, насколько быстро робот может ускоряться или тормозить и насколько тяжёл его груз. Авторы показывают, что такое упрощение создаёт проблемы в реальных помещениях. Роботы могут приходить на перекрёстки раньше или позже ожидаемого времени, что увеличивает вероятность заторов, близких столкновений или резких торможений, которые встряхивают перевозимый груз.
Добавление реальной физики в расписание
Исследователи решают эту проблему двухэтапным подходом, который сочетает физику с планированием расписания. Сначала они разрабатывают оценщик динамического времени в пути для AGV, названный DTT-AGV. Вместо того чтобы рассматривать коридор как единый интервал времени, DTT-AGV разбивает каждый манёвр на фазы: разгон, движение с постоянной скоростью и торможение. Он использует простую механическую модель AGV с перевозимым стеллажом, где стеллаж ведёт себя как масса, связанная пружинами и демпферами. Эта модель учитывает, как ускорение и замедление могут вызывать раскачивание или вибрацию груза. На основе этого алгоритм вычисляет, с какой максимальной безопасной скоростью транспортное средство может проходить заданное расстояние при данной нагрузке, не превышая ограничений по скорости, силам или вибрации, и возвращает реалистичное время прохождения для каждого сегмента пути.
Не допускать встреч «нос к носу»
Во-вторых, команда вводит метод связывания времен прибытия, ATC-AGV, который координирует работу многих роботов на общих участках. После того как DTT-AGV оценил длительность каждого сегмента, ATC-AGV назначает точные времена прибытия и отправления в каждой вершине — на перекрёстках, поворотах или точках передачи — вдоль маршрута каждого робота. Он строит временную «цепочку» в каждой общей точке, обеспечивая безопасный интервал между машинами с учётом их текущего состояния, например, загружены ли они, заряжаются или выполняют разворот. Если новый план приведёт к тому, что два AGV окажутся в одной вершине слишком близко по времени, ATC-AGV сдвигает расписание одного робота ровно настолько, чтобы восстановить требуемый запас безопасности. По сути, он превращает сетку пола склада в временно осознанную карту, которая помогает предотвратить столкновения ещё на этапе планирования.
Тестирование более плавного движения и мягких поездок
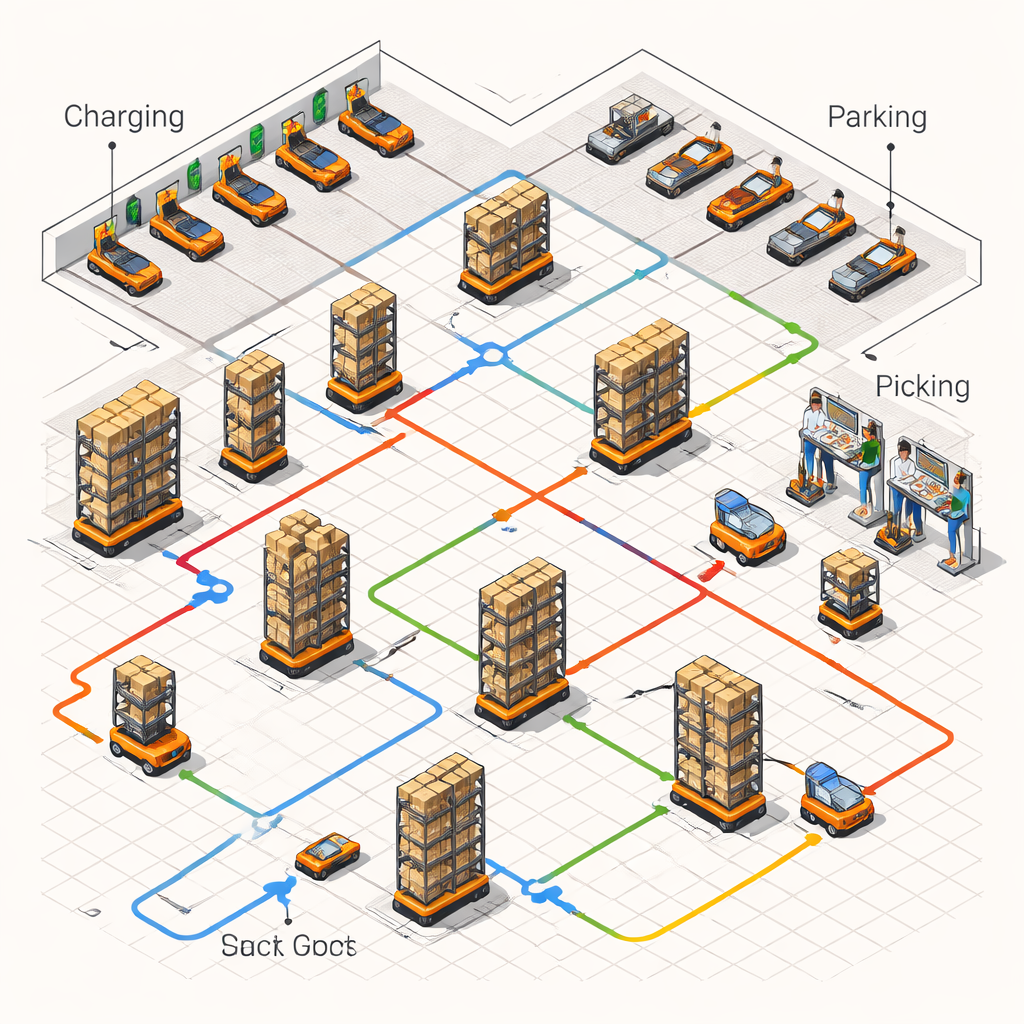
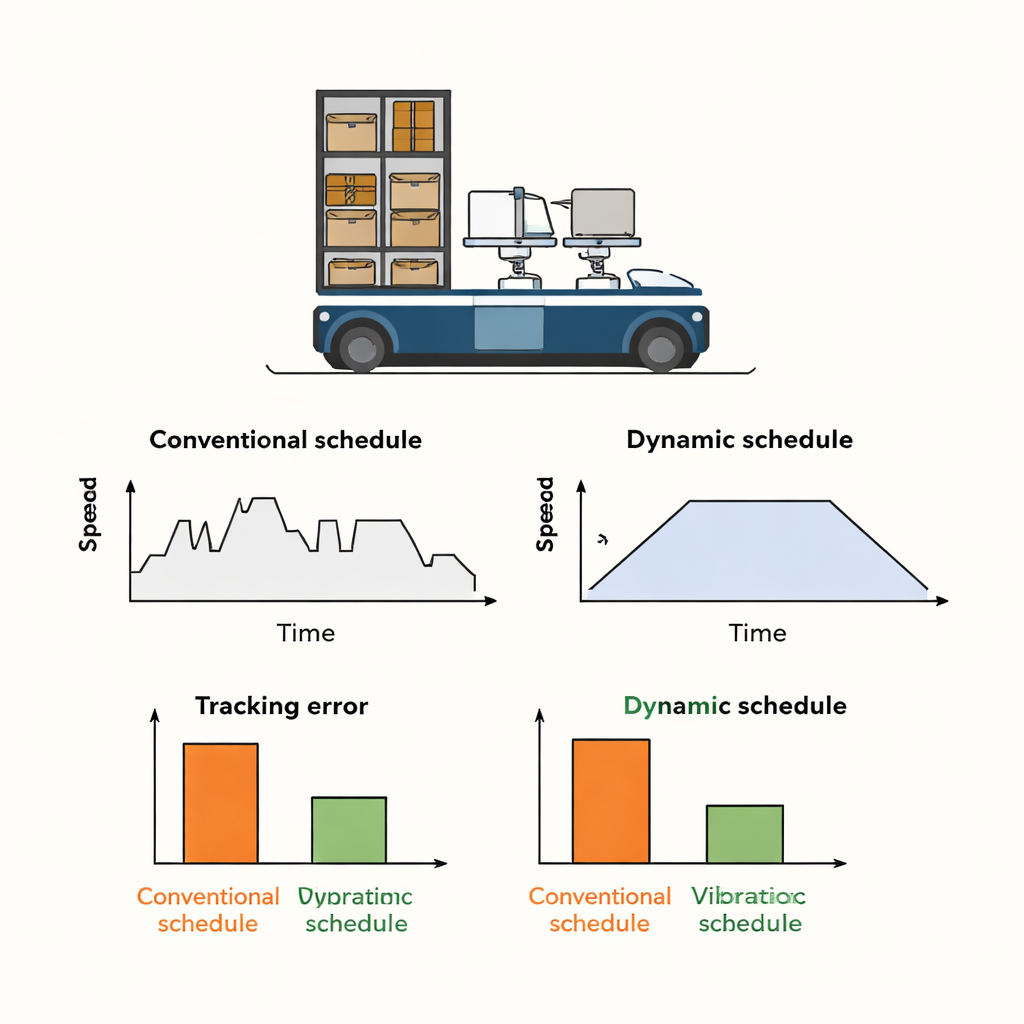
Чтобы проверить свои идеи, авторы моделируют AGV в складе с сеточной раскладкой для кросс-докинга, включающем зоны подзарядки, парковки и хранения стеллажей. Они сравнивают их планировщик с традиционным методом, который предполагает почти постоянную скорость и игнорирует детализированные фазы движения. В одном из тестов робот движется по L-образному пути с поворотом на 90 градусов. Традиционный подход генерирует резкие изменения скорости в угловой точке, с которыми реальный робот не может идеально справиться. Результатом становятся значительные ошибки слежения — расхождения между тем, где робот должен быть, и где он фактически находится — и всплески ошибок по времени в ключевых точках. С новым планировщиком путь разбивается на четкие фазы разгона, круиза и торможения. Смоделированный робот теперь точно следует целевому пути, с гораздо меньшими ошибками и более плавными поворотами.
Бережнее к посылкам и готово к будущему
Второй набор тестов сосредоточен на поведении самой нагрузки. При использовании традиционного расписания основание робота испытывает резкие рывки ускорения, которые возбуждают пружиноподобное поведение стеллажа, вызывая сильные вибрации в грузах. С динамическим расписанием, учитывающим нагрузку, ускорения остаются в более узком диапазоне и меняются более плавно. Измерения во времени показывают резкое снижение как пиковых, так и средних вибраций груза, что критично для хрупких, штабелированных или нестабильных предметов. Авторы также изучают, как такие упущенные факторы, как трение колёс о пол, могли бы повлиять на их оценки, и обнаруживают, что в типичных складских условиях добавочная ошибка по времени остаётся в пределах запасов безопасности, заложенных в их алгоритм.
Что это значит для реальных складов
Проще говоря, эта работа учит планировщики AGV учитывать реальное движение машин, которыми они управляют. Опираясь на время в пути и решения о праве проезда, основанные на том, как быстро роботы действительно могут ускоряться, тормозить и перевозить разные грузы, не разрушая их, предлагаемая структура снижает ошибки при следовании по траектории, уменьшает вибрации груза и снижает риск конфликтов на перекрёстках. Для операторов складов и производителей это означает более плавное движение, более безопасную обработку товаров и платформу, которая может масштабироваться по мере роста флотов и усложнения планировок.
Цитирование: Nguyen, T.P., Nguyen, H., Phan, D.M. et al. Dynamic chain for scheduling of the multi-AGV systems with load-aware motion profiling. Sci Rep 16, 6832 (2026). https://doi.org/10.1038/s41598-026-37083-z
Ключевые слова: автоматизированные транспортные средства, робототехника для складов, безстолкновенное планирование расписания, планирование движений, умная логистика