Clear Sky Science · ru
Пассивное позиционирование нескольких целей с классификацией сигналов и MIMO-радаром
Почему важно обнаруживать скрытые радиопередатчики
Современные военные и службы безопасности во многом зависят от умения определить, кто передаёт радиосигналы, где они находятся и что делают — всё это без раскрытия собственной позиции. Традиционный радар посылает импульсы и слушает эхо, что само по себе может выдать местоположение радара. Пассивный радар поступает наоборот: он тихо слушает сигналы, которые уже испускают цели. В этой работе рассматривается новый способ, с помощью которого два сотрудничающих самолёта могут совместно одновременно точно определять несколько радиопередающих целей, делая это надёжнее и с меньшим числом ошибок, даже когда сигналы слабые и перекрываются.
Слушать вместо кричать
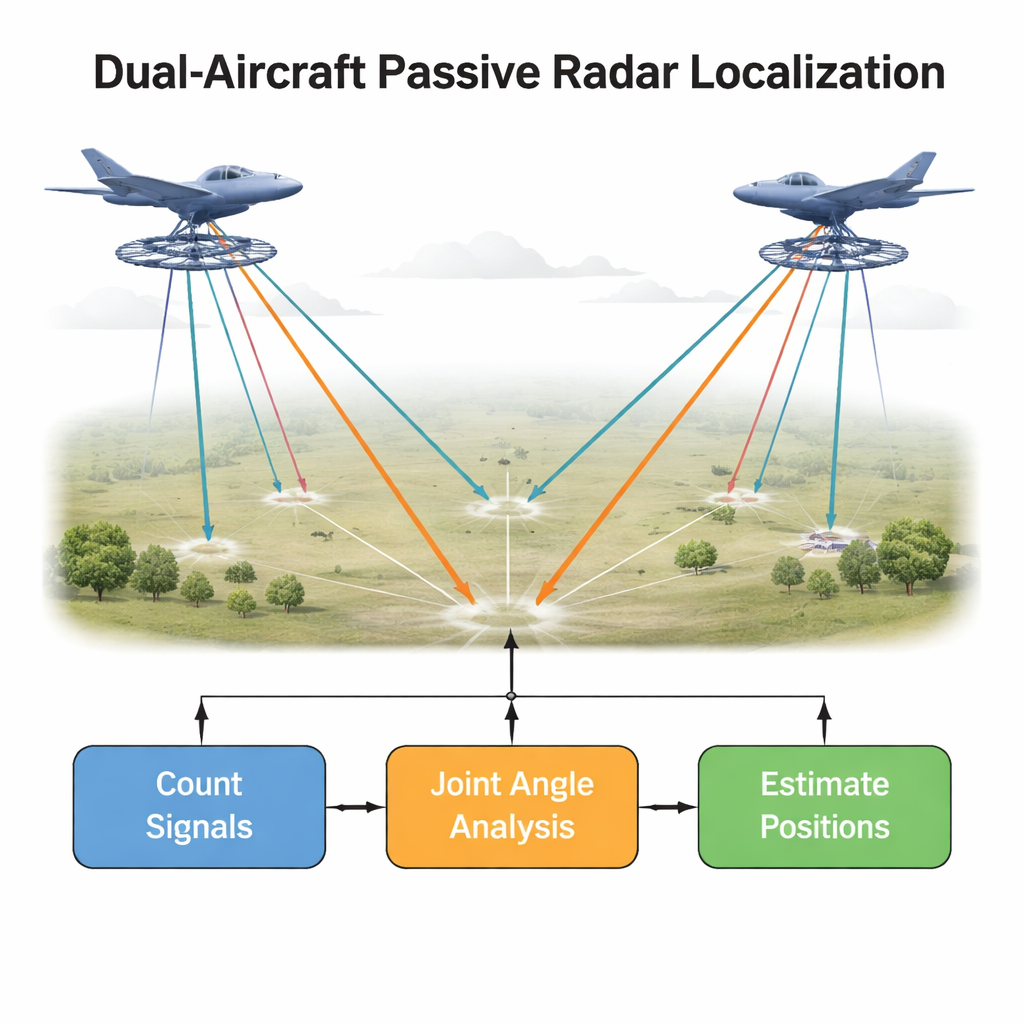
Вместо того чтобы посылать энергию в небо, пассивные системы просто принимают радиоволны, которые уже излучают корабли, машины или коммуникативные устройства. На каждом самолёте установлен кольцевой приёмник, способный определить направление прихода сигнала, подобно тому как наши два уха помогают локализовать звук. Сопоставляя углы с двух самолётов, система может триангулировать положение каждого источника на земле. Проблема в том, что на реальном поле боя часто одновременно работают многие излучатели, и их направления — воображаемые линии, указывающие от самолёта к источнику — могут пересекаться и накладываться. Традиционные подходы сначала отдельно оценивают углы на каждом самолёте, а потом пытаются сопоставить, какая линия с самолёта A соответствует какой линии с самолёта B; этот шаг легко даёт сбой и приводит к неверным позициям целей.
Дать двум самолётам мыслить как одному
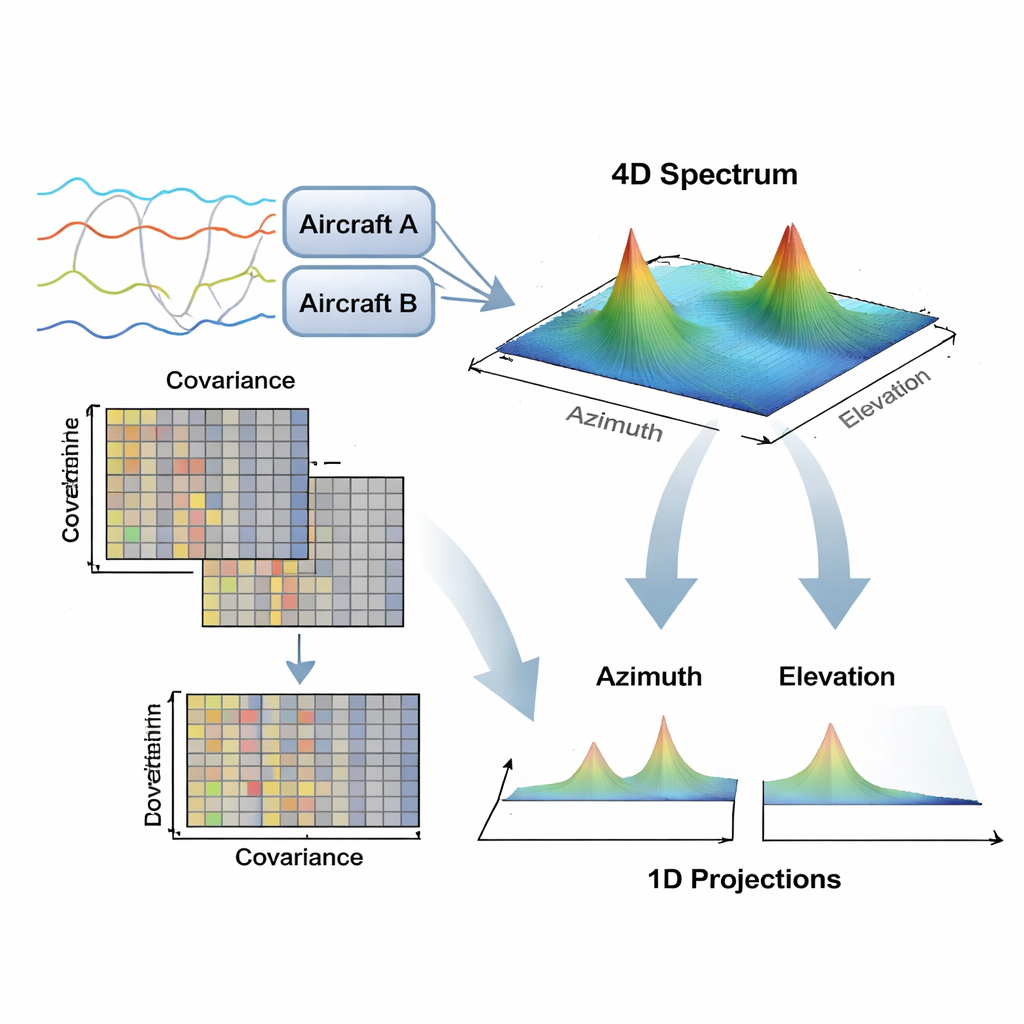
Авторы предлагают рассматривать два слушающих самолёта как единый, более крупный виртуальный датчик. Вместо того чтобы обрабатывать измерения раздельно, они объединяют исходные данные в один математический объект — ковариационную матрицу. Из этого совместного представления применяют известный метод определения направления — MUSIC, который действует как высокоселективный направленный микрофон и позволяет различать несколько источников одновременно. В такой конфигурации метод прямо ищет в общей «спектральной» картине пары углов, соответствующие одной и той же цели, как её видят оба самолёта. Поскольку сопоставление углов встроено в сам поиск, подход во многом избегает хрупкого постфактум-сопоставления, характерного для старых методов.
Сокращение размерности задач
Работа с двумя самолётами и множеством целей быстро становится вычислительно тяжёлой, потому что алгоритму приходится просматривать комбинации азимутов и углов возвышения для обеих платформ. Перебор по четырём угловым измерениям был бы непрактично медленным. Чтобы сделать задачу решаемой, авторы вводят пошаговую стратегию «снижения размерности». Сначала они учитывают, что удалённые наземные цели имеют небольшие углы возвышения, поэтому сначала фиксируют вертикальные углы и сканируют только горизонтальные, чтобы получить грубые направления. Затем уточняют вертикали в более узком поиске и, наконец, шлифуют оба набора углов по тонкой сетке. На каждом этапе они проецируют многомерную карту энергии на простые одномерные кривые, где выявлять пики — а значит, направления — гораздо проще и устойчивее к шуму.
Тестирование метода в виртуальном небе
Чтобы оценить эффективность, исследователи имитируют ситуацию, в которой два самолёта наблюдают несколько наземных целей в зашумлённой среде. Они сравнивают свой совместный подход dual-aircraft MUSIC с несколькими классическими методами определения направления и современными схемами пассивной локализации, при этом для справедливости используют один и тот же решатель для финального положения. Новый метод особенно хорошо показывает себя при оценке горизонтальных углов и в корректном разделении и сопоставлении множества целей. Он сохраняет хорошую точность даже при умеренных отношениях сигнал/шум и когда доступно лишь небольшое число снимков — коротких фрагментов данных — условиях, при которых стандартные критерии подсчёта и разделения источников часто дают сбой. Хотя оценки высоты остаются более подвержены ошибкам, особенно потому что антенны расположены в одной плоскости, ошибки по горизонтали в протестированных сценариях обычно значительно меньше километра.
Что это означает на практике
Для неспециалиста ключевой вывод таков: два слушающих самолёта, если они обрабатывают свои данные совместно и правильно, могут надёжнее локализовать несколько независимых радиообразующих источников на земле, чем если бы каждый самолёт работал в одиночку и затем пытался согласовать результаты. Предложенная техника объединяет подсчёт источников, разделение сигналов и поперечное сопоставление платформ в единую схему, при этом применяя математические приёмы, чтобы держать вычисления в реалистичных пределах. Проще говоря, метод помогает пассивным радарным системам с большей уверенностью и меньшим числом ошибок говорить: «эти сигналы исходят от того набора машин вон там» — способность, всё более ценная для разведки, радиоэлектронной борьбы и ситуационной осведомлённости без раскрытия собственной позиции.
Цитирование: Wang, H., Liu, X. & Lei, Z. Multi-target passive positioning with signal classification and MIMO radar. Sci Rep 16, 7777 (2026). https://doi.org/10.1038/s41598-026-36881-9
Ключевые слова: пассивный радар, локализация нескольких целей, угол прихода, кооперативное обнаружение двух самолётов, обработка сигналов