Clear Sky Science · ru
Посадка квадрокоптера на стену с помощью адаптивного непрерывного управления второго порядка в условиях неопределённостей
Почему важно, чтобы дроны умели пристёгиваться к стенам
Представьте себе крошечный дрон, который не просто зависает, пока не сядет батарея, а может тихо «садиться» на стену, как птица, и после этого часами наблюдать за мостом, полем или краем леса. В этой статье предложен новый метод управления такими «пристыковывающимися» дронами: он позволяет им подлететь к вертикальной поверхности, соприкоснуться с ней без отскока и надёжно удерживаться, даже когда воздух турбулентен или поведение аппарата не полностью известно. Работа направлена на превращение хрупкой летающей машины в надёжный инструмент для энергосберегающей инспекции.
От парящих роботов к разведчикам, приклеивающимся к стене
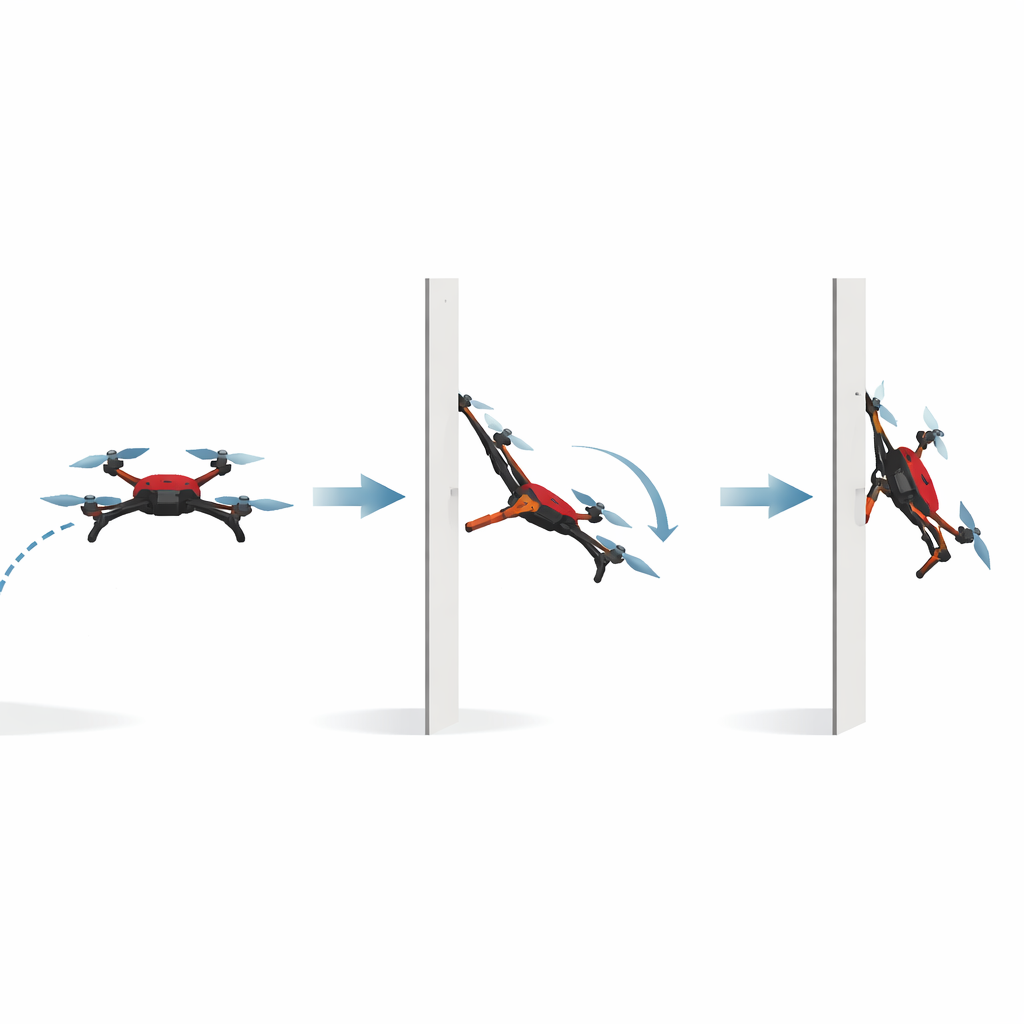
Малые четырёхроторные дроны, или квадрокоптеры, уже применяются для картографирования, инспекции строительных объектов, наблюдения за дикой природой и точного земледелия. Их главное ограничение — автономность: зависание расходует батарею. Посадка на поверхность — стену, столб или нижнюю часть моста — позволяет дрону отключить большинство двигателей, сохранив при этом датчики для длительного наблюдения. Выполнить это безопасно — непростая задача. В ходе короткого, но критического манёвра пристыковки дрон должен подлететь к стене, коснуться её и принять носовой наклон без отскока, скольжения или потери управления при внезапных порывах ветра или ошибках модели.
Задача аккуратной посадки на стену
Авторы исследуют квадрокоптер, оснащённый лёгким опорным рычагом спереди, который служит точкой контакта со стеной. В момент перехода от свободного полёта к контакту его положение (вправо‑влево, вперёд‑назад, вверх‑вниз) и ориентация (углы крена, тангажа и рыскания) тесно связаны: изменение ориентации меняет, как тяга превращается в перемещение, а внезапная реакция от стены может закрутить корпус аппарата. Кроме того, реальные эффекты — аэродинамика у поверхности, небольшие неточности конструкции и шум датчиков — действуют как неизвестные возмущения. Существующие методы робастного управления могут удерживать дроны устойчивыми, но часто вызывают высокочастотные «дребезжания» в командах двигателям, изнашивают аппаратную часть и лишь гарантируют постепенное уменьшение ошибок, а не их исчезновение в предсказуемо короткое время.
Более умный способ балансировать и адаптироваться
Чтобы преодолеть эти проблемы, в статье предложена схема адаптивного непрерывного управления второго порядка (ASOCC). Проще говоря, контроллер учитывает не только, насколько движение дрона отклоняется от цели, но и насколько быстро это отклонение меняется, формируя команды так, чтобы и ошибка, и её производная сошлись к нулю за конечное время. Встроенный наблюдатель возмущений действует как «слушатель шума» в реальном времени: он оценивает результирующее влияние неизвестных сил и расхождений модели и возвращает эту информацию в закон управления. Важный момент — коэффициенты усиления, определяющие силу реакции контроллера, подстраиваются в полёте на основе этих оценок, а не фиксированы заранее. Поскольку управляющие сигналы меняются плавно, а не переключаются резко, такая разработка значительно снижает дребезжание, сохраняя при этом высокую робастность.
Проверка нового управления
Исследователи сначала проанализировали математику пары наблюдатель–контроллер и доказали с помощью функций Ляпунова энергетического вида, что все ошибки движения сходятся к нулю за конечное время несмотря на ограниченные возмущения. Затем они смоделировали агрессивные сценарии пристыковки в программной среде, подвергая модель дрона ветровым силам, случайному шуму измерений и намеренным ошибкам в физических параметрах. В этих испытаниях ASOCC проводил дрон через три этапа — подготовку, подлет и пристыковку — удерживая ошибки положения и ориентации малыми, а управляющие команды — гладкими. По сравнению с несколькими современными альтернативами, включая популярные скользящие режимы и контроллеры на основе модели, новый метод сократил ключевые показатели ошибки слежения примерно на 35–55 процентов.
От симуляции к реальному дрону на стене
Выйдя за рамки симуляций, команда собрала миниатюрный квадрокоптер для пристыковки на базе коммерческой полётной платы и 3D‑напечатанной рамы с передним рычагом. В лабораторных экспериментах дрон автономно подлетал к наклонной стене, поднимался примерно на метр, затем наклонял нос вниз, чтобы коснуться и остаться прикреплённым. Временные ряды показывают, что высота, горизонтальное положение и угол тангажа следовали заданным траекториям с небольшими колебаниями, вызванными шумом датчиков. Несмотря на недорогие компоненты, задержки связи и ограничения приводов, дрон не отскочил и не вошёл в осцилляцию после контакта, что демонстрирует способность ASOCC справляться с реальными и нечистыми условиями полёта.
Что это значит для будущих летающих инспекторов
Для неспециалистов ключевой итог прост: эта работа предоставляет стратегию управления, которая позволяет малым дронам надёжно прикрепляться к вертикальным поверхностям и оставаться там, даже когда условия далеки от идеальных. Сочетание плавного, но сильнодействующего коррективного управления с адаптивным наблюдателем возмущений обеспечивает быструю и точную пристыковку без дребезжания и износа оборудования, характерных для многих робастных контроллеров. Это открывает путь к долгосрочному воздушному мониторингу с более лёгкими батареями, простыми платформами и повышенной безопасностью — важный шаг к паркам автономных «прилипших к стене» роботов, тихо наблюдающих за инфраструктурой, полями и природными территориями.
Цитирование: Gupta, S., Nandanwar, A., Dhar, N.K. et al. Perching of quadrotor using adaptive second-order continuous control in the presence of uncertainties. Sci Rep 16, 8578 (2026). https://doi.org/10.1038/s41598-026-36857-9
Ключевые слова: посадка квадрокоптера, адаптивное управление, инспекция беспилотником, наблюдатель возмущений, воздушная робототехника