Clear Sky Science · ru
Легковесная модель на базе YOLO для точного обнаружения кистей красного перца в роботизированной уборке
Умнее роботы для острого урожая
Сычуаньский перец — крошечные красные коробочки, дающие кухне Сычуани характерное покалывание и остроту — на удивление трудно собирать. Плоды растут густыми, колючими кистями, которые легко повредить, а ручной сбор медленный и сезонный. В этом исследовании представлена новая система компьютерного зрения под названием Red-YOLO, разработанная, чтобы помочь небольшим мобильным роботам быстро и точно обнаруживать эти хрупкие кисти перца в реальных садах, даже когда плоды перекрывают друг друга или скрыты листьями.
Почему сбор перца такой сложный
В отличие от крупных гладких фруктов, таких как яблоки, сычуаньский перец растёт множеством крошечных ягод, собранных в плотные гроздья на колючих ветвях. Кисти сильно отличаются от дерева к дереву: одни плотные и компактные, другие рыхлые и рассеянные, и все они окружены сложным фоном из ветвей, листьев и меняющегося освещения. Для робота важно видеть, где заканчивается одна кисть и начинается другая — и насколько плотно они упакованы. Сила захвата и даже размер захватного инструмента робота должны меняться в зависимости от плотности грозди, иначе хрупкие масляные мешочки плодов могут лопнуть, снизив качество и стоимость.
Создание библиотеки реальных изображений
Поскольку публичных коллекций изображений для этой культуры не существовало, исследователям сначала пришлось создать собственный набор данных. В течение двух вегетационных сезонов в уезде Ханьюань (Сычуань) они фотографировали персиковые деревья в реальных садах на потребительский смартфон, получив 960 высокоразрешённых квадратных изображений при разных углах солнца и в разное время дня. Каждое изображение тщательно размечали вручную, различая компактные и рыхлые грозди. Чтобы научить компьютер справляться с разнообразием, многие изображения цифрово изменяли — регулировали яркость и контраст, зеркально отражали по горизонтали, искажали некоторые сетки и поворачивали ракурсы. Это расширило обучающую выборку до более чем 4300 изображений, а небольшой набор нетронутых фотографий отложили в сторону для честной проверки итоговой системы.
Более компактная и точная модель компьютерного зрения
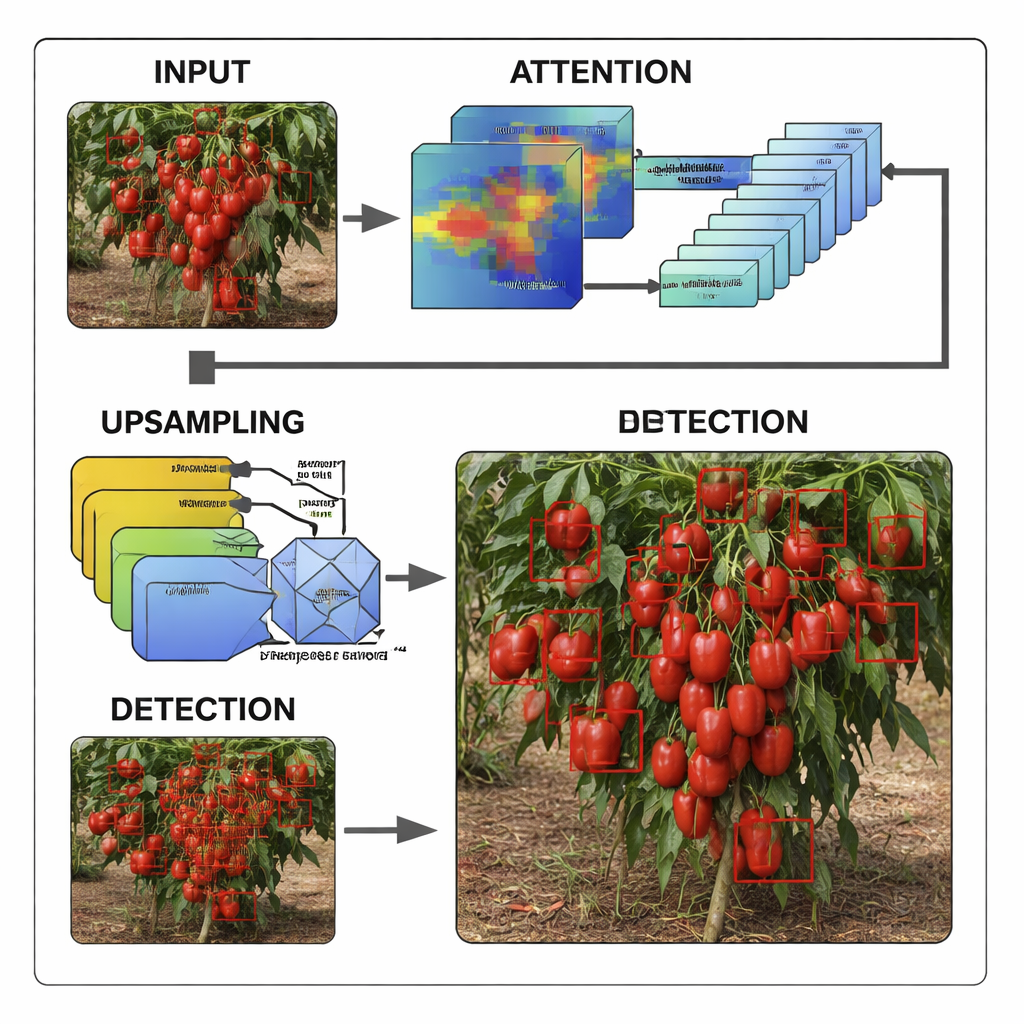
В основе системы лежит YOLOv8 — широко используемая модель обнаружения объектов «you only look once», которая находит объекты за один быстрый проход вместо нескольких медленных этапов. Команда адаптировала очень маленькую версию этой модели и затем переработала её специально для кистей красного перца. Они добавили модуль внимания, который учит сеть фокусироваться на каналах и областях, где, скорее всего, находятся плоды, игнорируя отвлекающие элементы вроде неба, ветвей и дальних деревьев. Некоторые части сети были переразработаны так, чтобы повторно использовать информацию эффективнее и сократить лишние вычисления. Также они заменили простую операцию изменения масштаба на более интеллектуальный блок апсэмплинга, который восстанавливает мелкие детали и границы вокруг перекрывающихся перцев, помогая модели различать начало и конец плотных кистей.
Быстрое и точное зрение для небольших роботов
Чтобы проверить, оправданы ли эти изменения, исследователи сравнили Red-YOLO со старыми, тяжёлыми системами обнаружения и с рядом современных легковесных вариантов YOLO. Традиционные многоступенчатые модели, хоть и мощные, оказались слишком медленными и требовательными к ресурсам для компактных садовых роботов. Несколько новых версий YOLO показали лучшие результаты, но испытывали трудности с маленькими, частично скрытыми кистями или загруженным фоном, часто пропуская плоды или принимая листья за перец. Red-YOLO нашёл более удачный баланс: он обнаруживал кисти перца с более высокой общей точностью и полнотой по сравнению со всеми моделями сравнения, при этом размер модели оставался ниже трёх миллионов параметров, а вычислительная нагрузка была достаточно низкой для встроенных процессоров. Испытания в разных садовых сценах показали, что Red-YOLO стабильно находил кисти даже когда плоды были крошечными, в тени или сильно перекрыты.
От лабораторной модели к помощнику в саду
Для неподготовленного читателя ключевой практический вывод таков: работа демонстрирует, что компактная, тщательно настроенная система зрения может дать небольшим роботам для сбора надёжное «око» в поле. C Red-YOLO робот может автоматически определять, имеет ли дело с компактной или рыхлой кистью, и заранее подстраивать размер и силу захвата перед сбором, снижая повреждения и экономя труд. Хотя текущее исследование сосредоточено на одном сорте перца в одном регионе, тот же подход — создание специализированных наборов данных и доработка лёгких моделей обнаружения — может быть распространён на другие специализированные культуры. По мере того как такие системы зрения станут более надёжными и широко внедрёнными, они могут помочь сделать сбор урожая быстрее, безопаснее и более последовательным, обеспечивая стабильные поставки перца, который задаёт вкус многим любимым блюдам мира.
Цитирование: Zhao, H., He, J., Li, Y. et al. A lightweight YOLO-based model for accurate detection of red pepper clusters in robotic harvesting. Sci Rep 16, 5879 (2026). https://doi.org/10.1038/s41598-026-36671-3
Ключевые слова: роботизированная уборка, обнаружение перца, компьютерное зрение, легковесный YOLO, умное сельское хозяйство