Clear Sky Science · ru
Разработка интеллектуального робота по уходу за пациентами с улучшенной автономной навигацией через оптимизацию путей в палатных коридорах
Роботы, которые помогают медсестрам, а не заменяют их
Больницы по всему миру испытывают повышенную нагрузку: больше пожилых пациентов, больше хронических заболеваний и персонал, работающий на пределе возможностей. В этом исследовании описывается интеллектуальный робот по уходу за пациентами, разработанный не для того, чтобы заменить медсестру, а чтобы незаметно выполнять повторяющиеся проверки и ночной надзор в палатах. Благодаря безопасному и надежному самостоятельному передвижению такой робот может помочь медсестрам быстрее замечать экстренные ситуации — например падения или резкое повышение температуры — одновременно снижая их рабочую нагрузку и уменьшая риск аварий в загруженных коридорах и узких дверных проемах.
Почему больничные коридоры сложны для роботов
На первый взгляд больничный коридор выглядит просто: ровные линии, чистые полы, привычные двери. Для робота это далеко не так. Кровати, тележки, стены и особенно узкие дверные проемы создают стесненные пространства, где даже небольшая ошибка может привести к столкновению. Многие существующие больничные роботы опираются на набор датчиков и сложное аппаратное обеспечение, чтобы справляться с этим. Команда этого исследования выбрала иной путь: они стремились создать робота, который сможет безопасно перемещаться, используя всего один главный датчик — двумерный лазерный сканер, измеряющий расстояния вокруг, — и более умный способ планирования маршрута.

Дополнительный взгляд медсестры
Исследователи разработали интеллектуального робота по уходу за пациентами (SPCR) на базе коммерческой колесной платформы. На корпусе они установили 3D-камеру для обнаружения падений и считывания жизненных показателей без контакта с пациентом, а сверху — 2D-лазерный датчик, который непрерывно сканирует окружение по кругу. Внутри робота размещен встраиваемый компьютер, аккумуляторы, контроллеры моторов и коммуникационная электроника, позволяющие ему связываться с управляющим приложением и самостоятельно принимать решения при вождении. Робот может перемещаться во всех направлениях, сгибать камеру для осмотра пациентов и рассчитан на работу в реальных больничных условиях в течение нескольких часов подряд.
Более умная карта вместо дополнительного оборудования
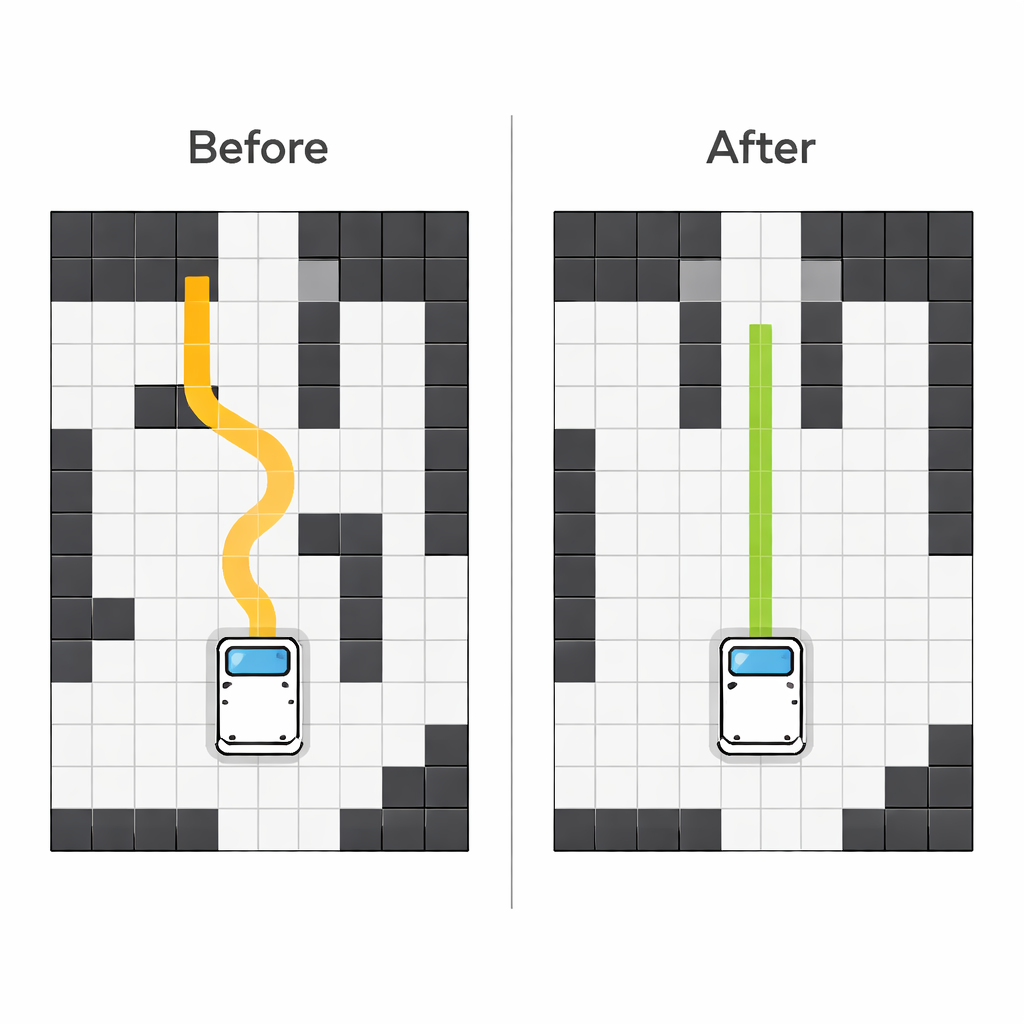
Для навигации роботу сначала нужна карта, показывающая, где можно и нельзя двигаться. Команда начала с точных чертежей больничного коридора и превратила их в сеточную карту, где каждая маленькая клетка помечена как свободное пространство, стена или препятствие. Вместо того чтобы оставлять карту как есть, они сделали её более осторожной, чем реальность. Была введена концепция «виртуальных зон препятствий» — дополнительных заблокированных областей, которые мягко отталкивают робота от рискованных мест, таких как края дверей и узкие углы. Программное обеспечение планирования пути, основанное на улучшенной версии алгоритма D* Lite, затем ищет на этой более безопасной карте маршруты, избегая резких поворотов и удерживая робота ближе к центру узких проходов.
Испытания робота в реальных палатах
Система была протестирована в реальном больничном коридоре, разделенном на три секции с разными комбинациями коридоров, дверей и препятствий. Роботу нужно было перемещаться между контрольными точками, проходить через стандартные двери шириной 90 сантиметров и избегать стен и стационарных объектов. Поскольку сам робот имеет ширину около 76 сантиметров, при прохождении дверей у него оставалось лишь несколько сантиметров запасу с каждой стороны — условия, в которых многие роботы испытывают трудности. Сравнение работы до и после корректировки сеточной карты показало, что вероятность успешного завершения маршрута без касаний выросла более чем на 30 процентов во всех секциях, при этом пути стали плавнее, а ненужных маневров — меньше.
Что это значит для будущего ухода за пациентами
Для неспециалистов главное послание простое: вместо того чтобы наполнять роботов всё большим количеством датчиков, это исследование показывает, что тщательное цифровое проектирование карт и более умное планирование маршрутов могут сделать больничных роботов одновременно безопаснее и практичнее. Робот, который надежно проходит через узкие двери ночью, следует эффективным маршрутам и тихо проверяет базовые показатели пациентов, мог бы освободить медсестер для человеческого ухода — утешения семей, принятия сложных решений и реагирования на экстренные ситуации. Авторы рассматривают эту работу как фундамент: будущие версии добавят больше датчиков и расширенные функции мониторинга пациентов, стремясь к надежным круглосуточным роботизированным помощникам, которые безопасно перемещаются в реальных больничных условиях.
Цитирование: Kim, B., Hyun, J., Yang, B. et al. Development of smart patient care robot with enhanced autonomous navigation through path optimization in hospital wards. Sci Rep 16, 6026 (2026). https://doi.org/10.1038/s41598-026-36664-2
Ключевые слова: роботы для больниц, автономная навигация, мониторинг пациентов, LiDAR-картирование, планирование маршрута