Clear Sky Science · ru
Оценка характеристик электромобиля с помощью кластеризации циклов движения на основе потерь и КПД двигателя‑инвертора
Почему это исследование важно для электромобилей
Электромобили обещают чище города и меньше выбросов углерода, но то, насколько эффективно они превращают энергию батареи в движение, зависит не только от двигателя. В этом исследовании заглядывают внутрь электрической трансмиссии, чтобы понять, как двигатель и силовая электроника, его питающая, теряют или сохраняют энергию в реальных дорожных условиях. Свернув тысячи секунд режима «старт‑стоп» до нескольких ключевых ситуаций, авторы показывают, как инженеры могут проектировать более эффективные электромобили с большим запасом хода, не тратя при этом чрезмерных вычислительных ресурсов.

От дорог и трафика к силам и скоростям
Исследователи начинают с дорожного уровня, используя три стандартных профильных скорости, на которые опираются автопроизводители при испытаниях: европейский, мировой и типичный американский городской циклы. Это временные ряды того, как быстро движется автомобиль, как часто он останавливается и с какой интенсивностью ускоряется. По этим кривым модель автомобиля вычисляет силы на колесах, а затем — крутящий момент и скорость, которые должен развивать электродвигатель через фиксированную передачу. Таким образом каждый момент движения переводится в точку на карте «крутящий момент—скорость», показывая, в каких частях рабочего диапазона двигатель реально проводит время и расходует энергию.
Сжатие тысяч моментов в несколько ключевых
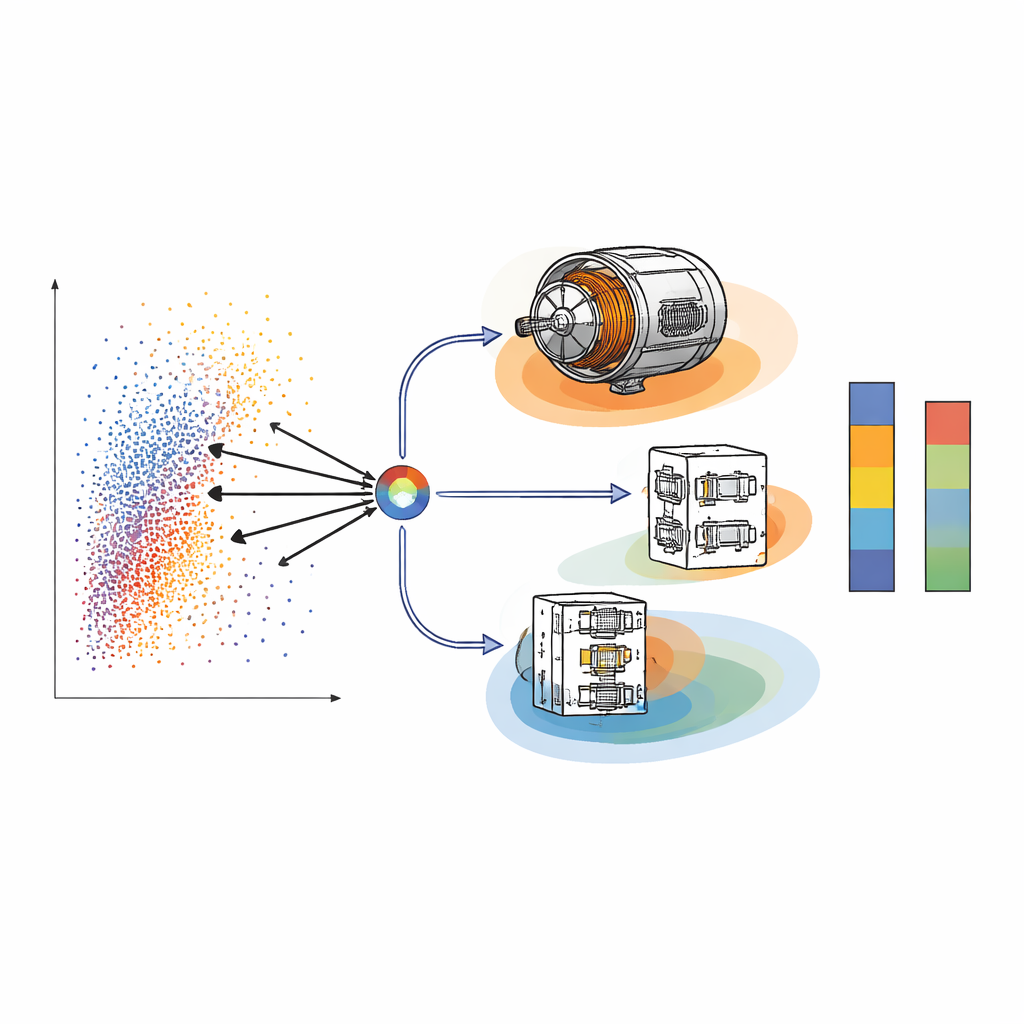
Моделирование сложной конструкции двигателя для каждой точки «крутящий момент—скорость» заняло бы дни или недели компьютерного времени. Чтобы избежать этого, в работе применяют инструменты анализа данных. Сначала обычный метод кластеризации группирует похожие рабочие точки. Затем осуществляется уточнение с учётом энергии, названное подходом «энергетического центра тяжести», которое гарантирует, что выбранные «репрезентативные точки» не просто типичны, но и находятся там, где действительно потребляется большая часть энергии. Каждой репрезентативной точке присваивается вес в зависимости от частоты её появления и количества потребляемой энергии, так что небольшой набор точек может заменить весь поезд, сохранив истинную картину энергопотребления.
Заглядывая внутрь двигателя и его электронной «пульсации»
Обладая этими репрезентативными точками, авторы переходят к подробному моделированию двигателя. Они изучают двигатель с внутренними постоянными магнитами, популярный выбор для электромобилей за счёт высокого момента и КПД в компактном корпусе. С помощью метода конечных элементов они картируют поведение магнитных полей, медных обмоток и стальных сердечников при разных режимах тока. Стратегия управления, известная как «максимальный момент на ампер», применяется для нахождения для каждой рабочей точки комбинации токов, обеспечивающей требуемый крутящий момент при минимальном электрическом усилии. Из этих симуляций извлекаются основные источники потерь: нагрев в медных обмотках и в намагниченной стали, которые отбирают энергию и требуют её отведения системами охлаждения.
Сравнение электронных «кранов», питающих двигатель
Далее в исследование добавляют влияние инвертора — блока быстрых электронных ключей, преобразующего постоянный ток батареи в трёхфазные токи, необходимые двигателю. Сравниваются две современные технологии инверторов: на основе IGBT‑ключей и на основе SiC MOSFET‑ключей. Используя модели, построенные на данных производителей, авторы вычисляют как потери проводимости (энергия, теряемая при протекании тока), так и потери переключения (всплески энергии, теряемые каждый раз при включении и выключении устройств). Полученные формы тока подаются в модели двигателя, что выявляет, как резкие импульсные токи реальных инверторов вносят дополнительные пульсации крутящего момента и увеличенные магнитные потери по сравнению с идеальным сглаженным питанием.
Что это значит для запаса хода, КПД и вычислительного времени
По всем трём циклам движения подход с кластеризацией воспроизводит КПД двигателя за полный цикл с погрешностью около двух процентов, при этом сокращая детальные симуляции с десятков часов до примерно десяти минут на цикл только для двигателя. Когда учитывается поведение инвертора, суммарные потери заметно растут, и общий КПД трансмиссии падает на несколько процентных пунктов по сравнению с идеализированным случаем. Однако инвертор на базе SiC MOSFET последовательно теряет меньше энергии, чем инвертор на базе IGBT, благодаря более низким потерям переключения, что делает его особенно привлекательным для автомобилей с частыми изменениями скорости. Для неспециалиста главный вывод — двигатель и его электронный «кран» должны проектироваться совместно, а умное сокращение данных позволяет инженерам быстро проверять множество идей. За счёт захвата наиболее важных дорожных ситуаций и моделирования совместной системы «двигатель‑инвертор» эта работа предлагает практичный путь к электромобилям, которые проезжают больше на той же зарядке батареи без необходимости нереалистичных объёмов вычислений.
Цитирование: Abdelali, K., Bendjedia, B., Rizoug, N. et al. Evaluation of electric vehicle performance using driving cycle clustering based on motor-inverter losses and efficiency. Sci Rep 16, 8040 (2026). https://doi.org/10.1038/s41598-026-36663-3
Ключевые слова: эффективность электромобиля, конструкция тягового двигателя, силовая электроника инвертора, анализ циклов движения, энергетические потери