На морском дне автономные подводные аппараты выполняют роль наших глаз и ушей для климатических исследований, инспекций инфраструктуры и поисково-спасательных операций. Тем не менее эти робот-подлодки сталкиваются с базовой проблемой: как эффективно обмениваться информацией и принимать решения в суровой среде, где сигналы медленные, шумные, а энергия ограничена. В статье предлагается новый подход, помогающий подводным роботам общаться, обнаруживать объекты и обеспечивать безопасность — за счет сочетания дополненной и виртуальной реальности с направлением ИИ, называемым обучением с подкреплением.
Почему подводная связь так сложна
Передача данных под водой значительно сложнее, чем в воздухе. Радиоволны, которые обеспечивают Wi‑Fi и 5G, быстро поглощаются морской водой. Акустические (звуковые) сигналы проходят дальше, но дают очень низкую скорость передачи данных и могут задерживаться, отражаться или искажаться. Магнитная индукция работает лишь на десятках метров. Существующие системы управления подводными роботами часто рассматривают эти каналы отдельно и используют фиксированные правила для навигации и сенсоров. В результате они медленно адаптируются к изменяющимся условиям, тратят батарею впустую и оставляют каналы связи уязвимыми для прослушивания или атак.
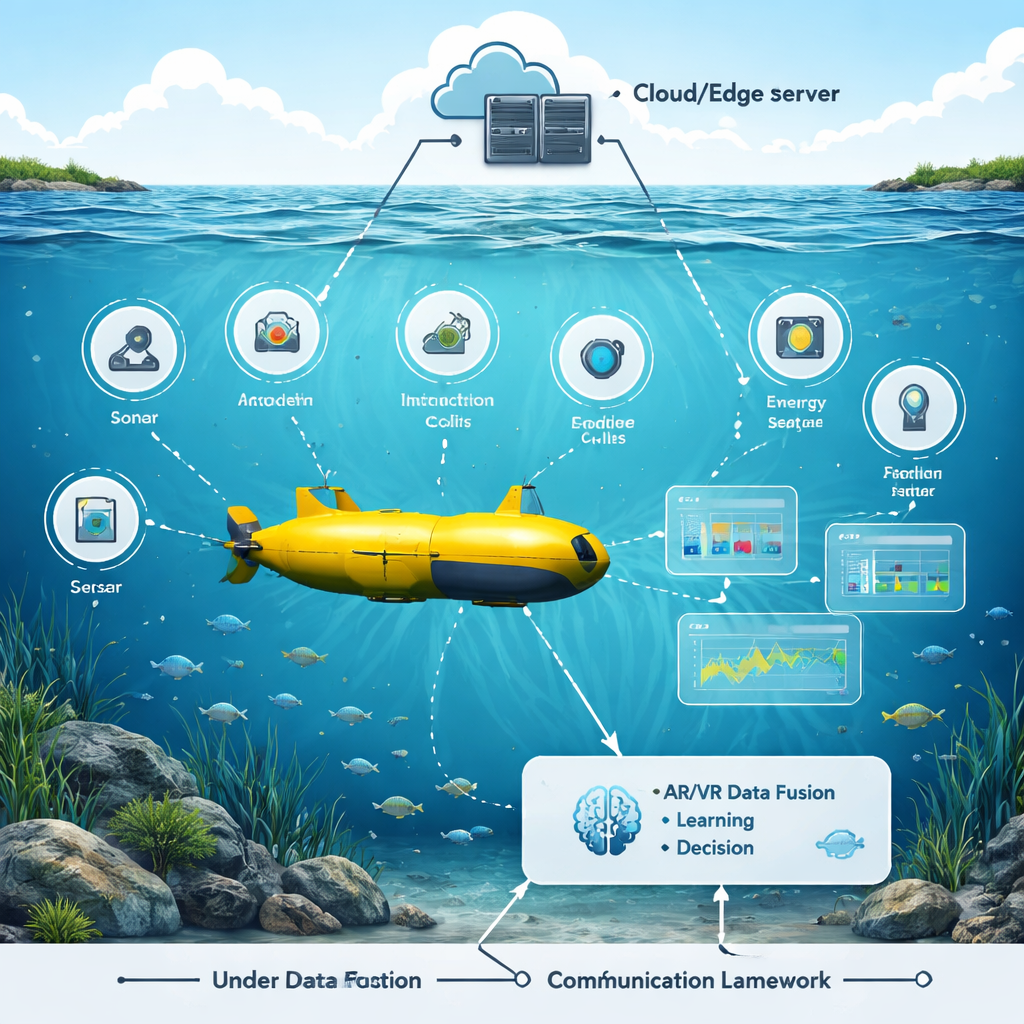
Виртуальный океан для тренировки инстинктов Figure 1.
Авторы создали тестовую среду на базе дополненной и виртуальной реальности, воспроизводящую оживленный подводный мир: плавающие рыбы, камни, лодки и буи, а также реалистичные шумы и затухание сигналов в воде. Смоделированный подводный аппарат курсирует по этой среде, используя множество датчиков — сонар, камеры, акустические модемы, измерители энергии и трекеры положения. В виртуальной сцене исследователи могут менять положение объектов, параметры воды и настройки сенсоров и сразу видеть, как реагирует робот. Этот слой AR/VR не просто красивая визуализация: он объединяет сырые данные сенсоров в единое 3D-изображение, которое легче воспринимается ИИ и по которому удобнее принимать решения.
Обучение робота на собственном опыте
В основе фреймворка лежит стратегия ИИ, которую авторы называют Adaptive Augmented Reality and Reinforcement Learning Scheduling Strategy (AARLSS). Вместо следования фиксированному сценарию робот учится методом проб и ошибок в виртуальном океане. В каждый момент он наблюдает объединённое состояние сенсоров, выбирает действие (например, изменить курс, скорректировать частоту опроса датчиков или переключиться между коротко- и дальнодействующей связью) и получает награду. Эта награда балансирует четыре цели: экономию энергии, сокращение задержек, снижение рисков безопасности и уменьшение использования вычислительных и сетевых ресурсов. Глубокая сеть Q-обучения хранит и обновляет ожидаемую ценность разных решений, используя мини-пакеты прошлых опытов в памяти воспроизведения, чтобы робот мог учиться как на недавних, так и на более старых ситуациях.
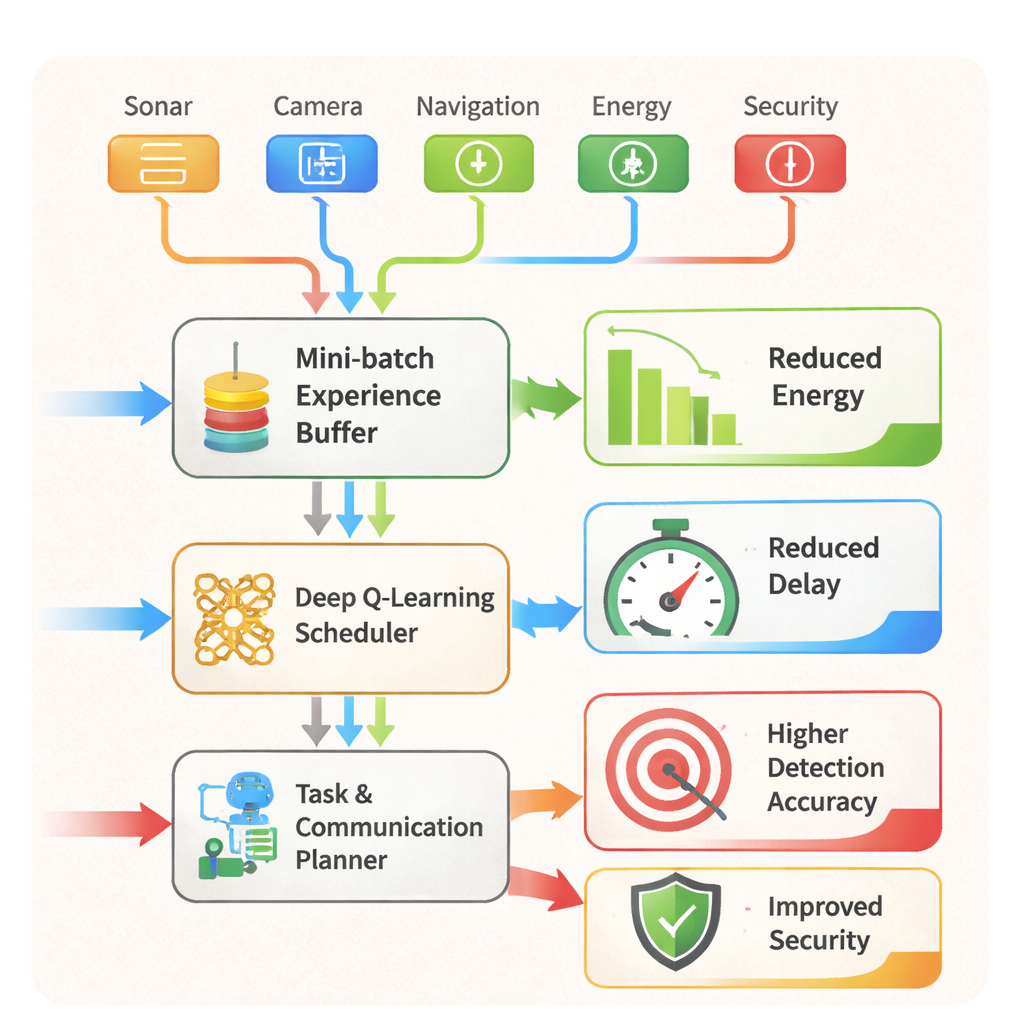
От умного планирования к более безопасным миссиям Figure 2.
AARLSS также выступает в роли планировщика в реальном времени. Он решает, какие задачи — навигация, обнаружение объектов, связь или проверки безопасности — должны выполняться где и когда, и следует ли обрабатывать данные на самом роботе, выгружать их на edge‑сервер или отложить. Дополнительно встроенная система обнаружения вторжений постоянно анализирует паттерны в данных сенсоров и сети, чтобы обнаруживать аномалии, которые могут указывать на атаку или сбой, и может запускать защитные меры, например блокировать рискованные каналы или принудительно оставлять вычисления локальными. В тестах в AR/VR-симуляторе фреймворк превзошёл несколько известных методов обучения с подкреплением. Он сократил энергопотребление подводного аппарата примерно на 20%, уменьшил задержки в связи и выполнении задач примерно на 18–20% и повысил точность обнаружения объектов до примерно 97–98%, даже в сложных маневрах и загроможденных сценах.
Что это значит для реальных океанов
Для неспециалистов главный вывод в том, что это исследование указывает путь к подводным роботам, которые будут более самостоятельны, эффективны и надёжны. Обучаясь в богатом виртуальном океане и одновременно балансируя энергию, время, точность и безопасность, AARLSS позволяет аппарату решать, когда говорить, когда слушать и когда молчать, чтобы экономить энергию — при этом внимательно следя за окружением и защищая данные. Хотя результаты получены в продвинутом симуляторе, а не в открытом море, они позволяют предположить, что в будущем флоты подводных роботов смогут выполнять более длительные, безопасные и насыщенные данными миссии с меньшим вмешательством человека, улучшая всё — от морской науки до инспекций в офшорной промышленности.
Цитирование: Lakhan, A., Mohammed, M.A., Ghani, M.K.A. et al. A novel augmented reality and reinforcement learning empowered communication framework for underwater unmanned autonomous vehicle.
Sci Rep16, 6241 (2026). https://doi.org/10.1038/s41598-026-36647-3
Ключевые слова: подводная робототехника, автономные подводные аппараты, обучение с подкреплением, дополненная реальность, подводная связь