Clear Sky Science · ru
Управление модельным предиктивным контролем с обучением с подкреплением для оптимизации встречно-вращающегося синхронного двигателя с постоянными магнитами в системе подводной пропульсии
Более «умные» двигатели для более скрытных субмарин
Современные субмарины полагаются на тихую и эффективную пропульсию, чтобы исследовать океаны и выполнять научные, коммерческие или оборонные задачи. В этом исследовании рассматривается особый тип электрического двигателя, который приводит в движение два винта в противоположных направлениях, помогая судну двигаться плавно и бесшумно. Авторы показывают, как сочетание продвинутых предсказательных инструментов и алгоритма обучения позволяет поддерживать эти двигатели стабильными и эффективными, даже когда волны, течения и резкие маневры выводят их из равновесия.
Два винта — одна устойчивая субмарина
Традиционные системы с одним винтом могут вызывать кручение и крен субмарины, особенно на высоких скоростях, что осложняет управление и увеличивает заметность. Чтобы избежать этого, инженеры используют систему встречно-вращающихся винтов: два винта установлены на одном валу, но вращаются в противоположных направлениях. В основе такой схемы лежит встречно-вращающийся синхронный двигатель с постоянными магнитами (CRPMSM), представляющий собой, по сути, два компактных высокомоментных электродвигателя, расположенных рядом. Такая компоновка компенсирует нежелательные крутящие моменты, повышает энергетическую эффективность и снижает шум — все это критично для скрытности и длительных подводных переходов. Однако при неравномерной нагрузке на два ротора, например в турбулентной воде или при резких поворотах, поддержание синхронизации обеих частей становится серьёзной задачей управления. 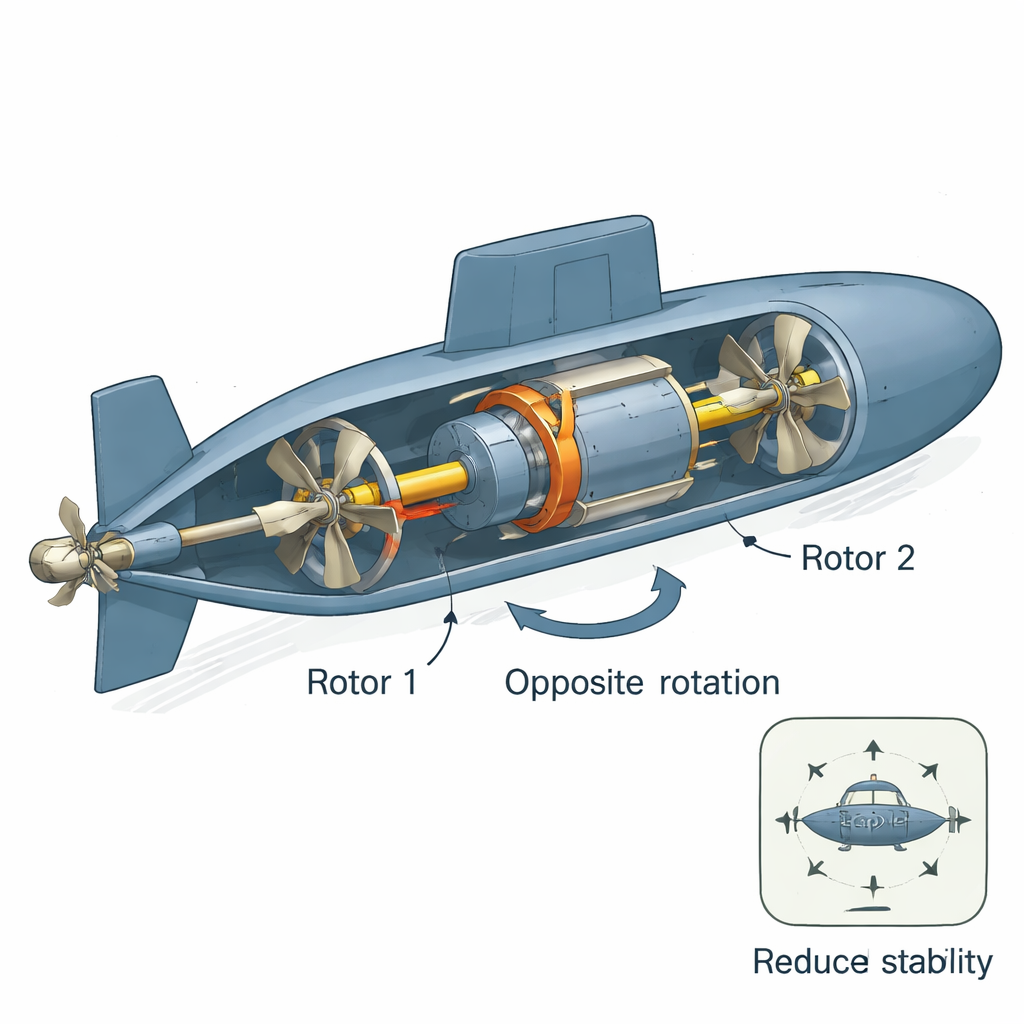
Почему традиционные методы управления недостаточны
Инженеры пробовали различные стратегии управления, чтобы синхронизировать роторы CRPMSM и сохранить эффективность. Методы вроде ориентированного на поле управления и прямого управления моментом могут хорошо работать в спокойных и предсказуемых условиях, но они испытывают трудности, когда подводная среда меняется быстро или становится сильно неоднородной. Более сложные подходы, такие как скользящий режим, нечеткая логика и адаптивное управление, повышают робастность, но часто опираются на очень точные математические модели двигателя и окружающей среды. На практике такие модели никогда не бывают идеальными, и их несовершенства приводят к увеличению пульсаций момента, более медленному восстановлению после возмущений и потерям энергии. Модельный предиктивный контроль (MPC), который планирует оптимальные управляющие действия на коротком горизонте будущего, обеспечивает быструю реакцию, но по‑прежнему сильно зависит от качества базовой модели.
Гибридный контроллер, который учится в процессе работы
Авторы предлагают гибридную архитектуру управления — RL‑MPC (Model Predictive Control с обучением с подкреплением), которая сочетает достоинства обоих подходов. MPC использует математическую модель CRPMSM для предсказания того, как будут изменяться токи, момент и скорость в ближайшие шаги управления, и выбирает напряжения, позволяющие отслеживать заданные цели по скорости и току при соблюдении ограничений. Поверх этого работает агент обучения с подкреплением на основе алгоритма Twin Delayed Deep Deterministic Policy Gradient (TD3), который наблюдает за реальным поведением двигателя. Получая вознаграждение за малые ошибки скорости, тока и усилия управления, агент постепенно корректирует выходы MPC, компенсируя погрешности модели, неравномерные нагрузки и внешние возмущения. На завершающем этапе пространство‑векторная широтно‑импульсная модуляция преобразует эти оптимизированные команды по напряжению в управляющие импульсы для инвертора, приводящего двигатель в действие.
Испытания «умного» двигателя
Чтобы оценить предложенный подход, исследователи построили подробную модель 120‑кВт встречно‑вращающейся системы в MATLAB/Simulink и протестировали её в трёх реалистичных сценариях работы. В первом режиме двигатель работал на постоянной скорости при меняющейся, но сбалансированной нагрузке на оба ротора; во втором скорость варьировали при постоянной нагрузке; в третьем, наиболее сложном случае, роторы испытывали разные нагрузки при фиксированной заданной скорости. Во всех сценариях RL‑MPC сравнивали напрямую с традиционным MPC при одинаковых горизонтах предсказания и управления. 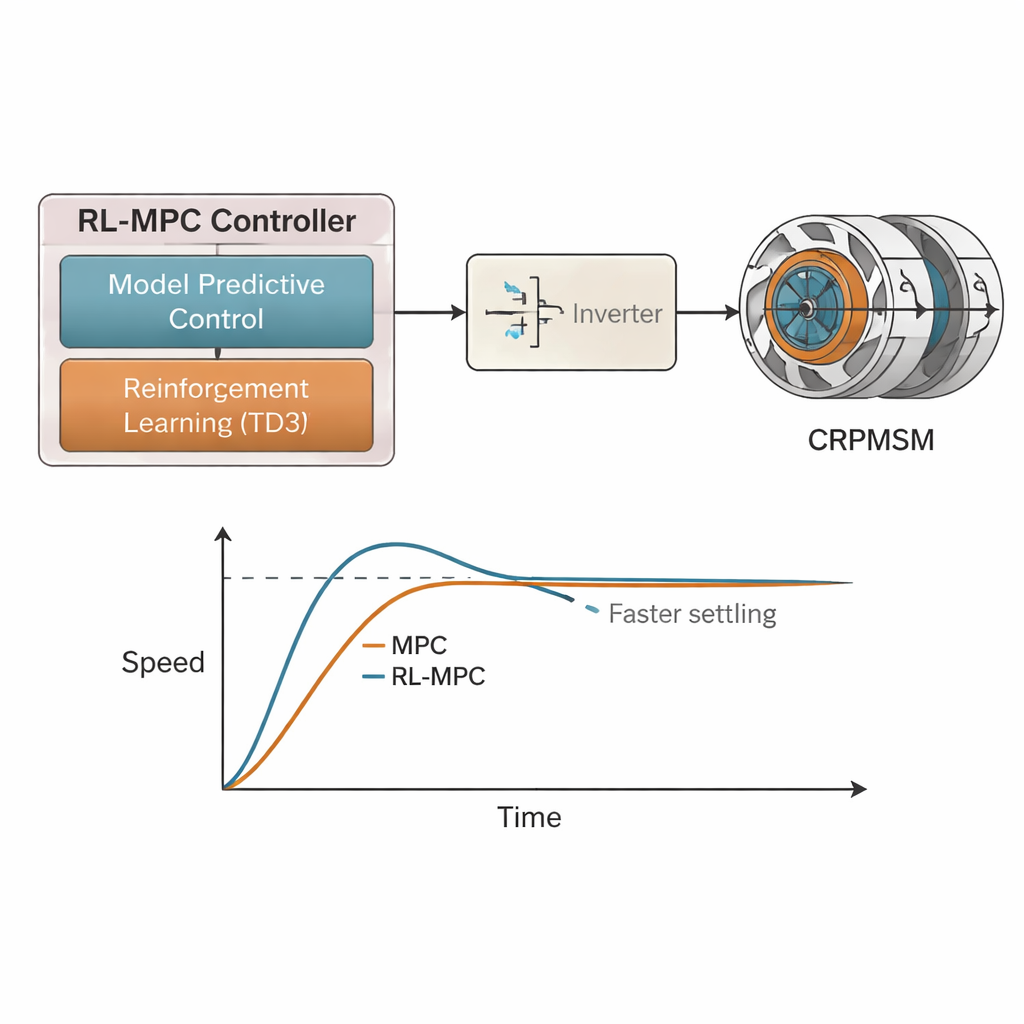
Быстрее реакция, чище токи, лучшая синхронизация
Гибридный контроллер RL‑MPC стабильно превзошёл стандартный MPC во всех тестах. При внезапных изменениях нагрузок или скорости RL‑MPC снизил превышение по скорости примерно с 30% до примерно 15–16,6% и вдвое сократил время переходного процесса — примерно с 1,4 с до 0,7 с. Пульсации момента стали меньше, и два встречно‑вращающихся ротора оставались тесно синхронизированными даже при значительно большей нагрузке на один из них. Важным также оказалось заметное улучшение качества тока статора: суммарные гармонические искажения упали более чем на 60% при жёстких переходных неравновесных нагрузках — с 9,3% для MPC до 3,4% для RL‑MPC, и до примерно 2–3% в установившемся режиме. Чище токи означают меньше нагрева, более тихую работу и более высокую общую эффективность.
Что это значит для будущих подводных аппаратов
Для неспециалиста основная мысль такова: добавление уровня обучения поверх предиктивного контроллера делает субмаринные двигатели и умнее, и устойчивее. Вместо того чтобы полагаться только на фиксированные уравнения, которые могут не сработать в жестком море или при резких манёврах, архитектура RL‑MPC способна адаптироваться на ходу, сохраняя синхронизацию, отзывчивость и эффективность двухроторного двигателя. Хотя полученные результаты пока основаны на моделировании и требуют проверки на реальном оборудовании и в реальных океанических условиях, эта работа указывает путь к будущим подводным аппаратам, которые пройдут дальше на том же запасе энергии, будут издавать меньше шума и останутся устойчивыми и управляемыми в сложных условиях.
Цитирование: Delelew, E.Y., Dulecha, K.A., Ararso, Z.T. et al. Reinforcement learning-driven model predictive control for optimizing counter-rotating permanent magnet synchronous motor in submarine propulsion system. Sci Rep 16, 5277 (2026). https://doi.org/10.1038/s41598-026-36126-9
Ключевые слова: подводная пропульсия, встречно-вращающийся двигатель, контроль с обучением с подкреплением, модельный предиктивный контроль, подводные аппараты