Clear Sky Science · ru
Алгоритм совместной оценки дальности–угла–скорости для радара FDA-MIMO на основе обработки графовых сигналов
Более умный радар для переполненного, шумного мира
От беспилотных автомобилей до воздушного контроля — современное общество сильно зависит от радарных систем, которые быстро и надёжно обнаруживают и отслеживают объекты. По мере того как небо, дороги и радиочастотный спектр становятся всё более загруженными, радарам нужно выделять несколько движущихся целей на фоне сильных помех и шума. В этой статье предложен новый способ повысить разрешающую способность мощного класса радаров — так называемых FDA-MIMO-радаров — в трёх измерениях (дальность, направление и скорость), используя инструменты из развивающейся области, известной как обработка графовых сигналов.
Почему эта архитектура радара важна
Традиционные фазированные антенные решётки управляют диаграммой направленности в основном по углу, подобно тому как фонарь поворачивается влево и вправо. Радиолокационные системы с частотно-различающейся антенной решёткой (Frequency Diverse Array, FDA) работают иначе: каждый элемент антенны излучает на слегка отличающейся частоте. Эта небольшая деталь делает диаграмму направленности зависимой не только от угла, но и от расстояния и времени. В сочетании с приёмно-передающими MIMO-техниками FDA-MIMO-радары в принципе способны точно определять положение цели в трёх измерениях: насколько она удалена, под каким углом расположена и с какой скоростью движется. Задача состоит в том, чтобы быстро и точно извлечь всю эту информацию из сырых эхосигналов, особенно когда целей много, а сигналы скрыты в шуме.
Преобразование радарных эх в сетевую задачу
Авторы решают эту задачу, переосмысляя измерения радара как сигналы, расположенные на графе — сети узлов и связей. Каждый узел такого графа представляет собой конкретную пару передатчик–приёмник в FDA-MIMO-матрице, а связи отражают, как сигналы на соседних узлах связаны в пространстве. Тщательно задав эти соединения, они формируют «матрицу смежности», описывающую, как эхо должно распространяться по матрице при наличии цели на заданной дальности и угле. Когда предполагаемая пара дальность–угол совпадает с реальной целью, измеренная картина эха почти идеально совпадает с одной из естественных колебательных мод графа. На практике это означает, что после графовой версии преобразования Фурье энергия сжимается в очень острый пик на одном спектральном компоненте. Алгоритм ищет такие пики по сетке значений дальности и угла, чтобы определить местоположение целей. 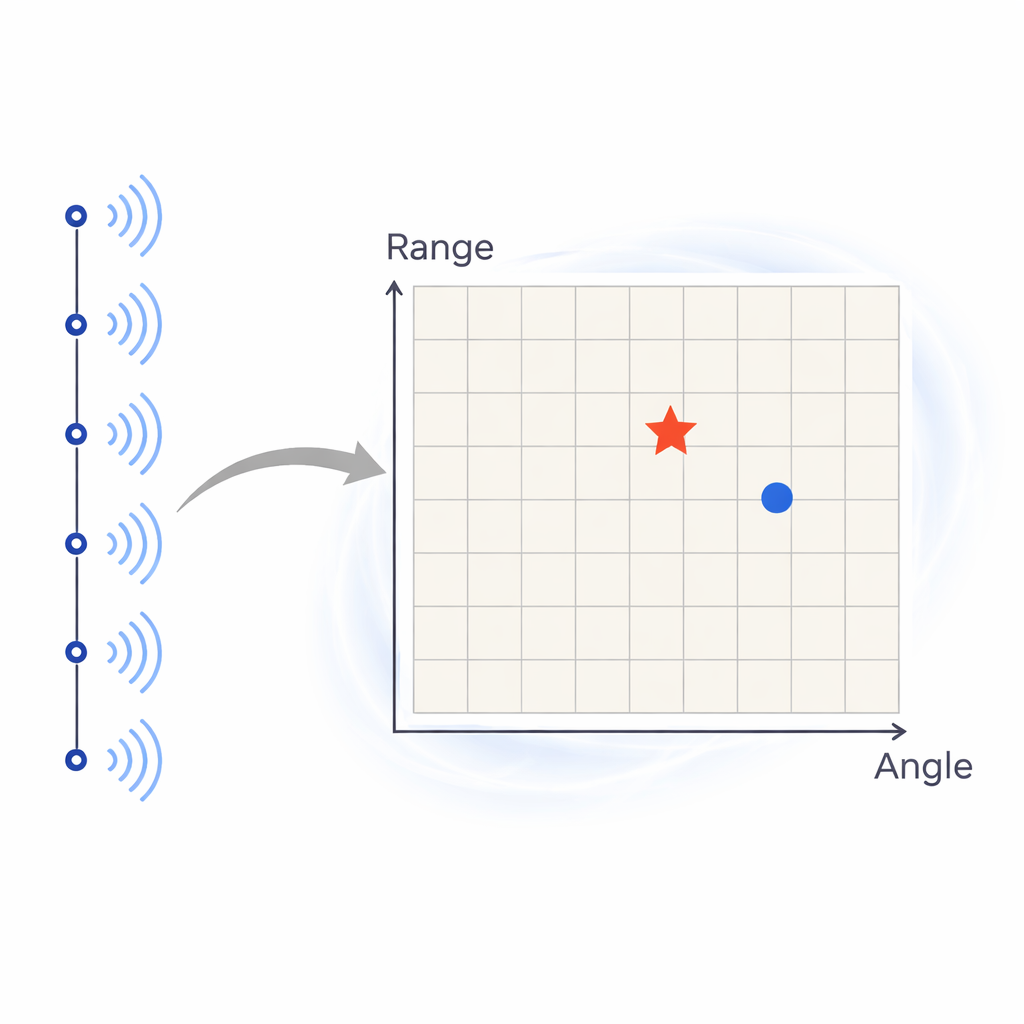
Добавляем движение: измерение скорости по тому же принципу
Чтобы оценить скорость движения цели, метод расширяет графовую концепцию во временное измерение, через несколько радарных импульсов. Теперь каждый узел представляет отдельный импульс во времени, а связи соединяют соседние импульсы в цикл, чтобы отразить, как сигнал должен эволюционировать при наличии определённой радиальной скорости цели. И вновь, когда предполагаемая скорость совпадает с истинной, преобразованный сигнал показывает сконцентрированный пик в спектральной области графа. Алгоритм перебирает кандидаты по скорости, ища, где этот пик наиболее выражен. Важно, что авторы спроектировали свою схему так, чтобы оценки дальности–угла из пространственного графа и оценки скорости из временного графа усиливали друг друга. Данные со всех антенн и всех импульсов объединяются, формируя многомерную структуру, которая повышает точность без избыточных вычислений. 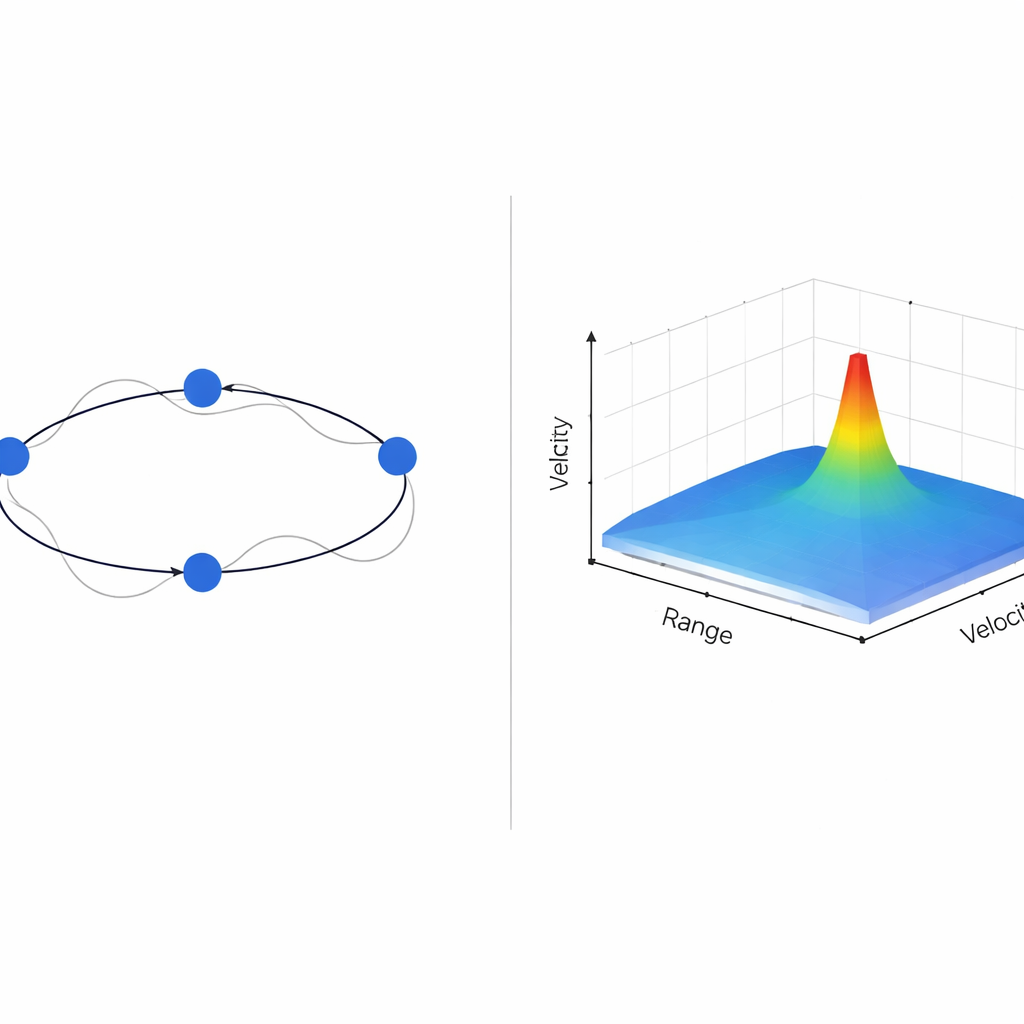
Проверка метода
С помощью серии моделирований исследователи сравнивают свой графовый подход с широко используемой высокоточной техникой, известной как MUSIC. Они проверяют сценарии с одной и несколькими целями, исследуют, насколько хорошо каждый метод разделяет близко расположенные объекты, и оценивают работу при очень слабых сигналах относительно шума. Графовый алгоритм демонстрирует сопоставимую вычислительную нагрузку с классическими методами, но обеспечивает более резкое разрешение по дальности, углу и скорости. Он особенно эффективен в подавлении ложных пиков, вызванных шумом, что ведёт к более чистым и надёжным картам целей. Даже при низком отношении сигнал/шум — условиях, в которых многие традиционные методы испытывают трудности — новый алгоритм сохраняет плотные границы ошибок по положению целей и их скоростям.
Что это значит для реального мира радаров
Проще говоря, работа показывает, что представление радарных данных как сигналов на сети позволяет проводить более умную обработку, которая чище отделяет реальные цели от помех. Для приложений — от обороны и управления воздушным движением до автомобильной безопасности и экологического мониторинга — предлагаемая техника обещает более точное отслеживание нескольких движущихся объектов в сложных условиях, без нереалистичных затрат вычислительных ресурсов. Объединив продвинутую антенную архитектуру с графовой математикой, авторы демонстрируют практический путь к радарам, которые видят дальше, резче и надёжнее в всё более сложной электромагнитной среде.
Цитирование: Li, Q., Meng, A., Liao, K. et al. A joint range–angle–velocity estimation algorithm for FDA-MIMO radar based on graph signal processing. Sci Rep 16, 6000 (2026). https://doi.org/10.1038/s41598-026-36124-x
Ключевые слова: радарное обнаружение, слежение за целями, обработка сигналов, обработка графовых сигналов, FDA-MIMO