Clear Sky Science · ru
Автономная навигация в неструктурированных наружных условиях с использованием обучения с подкреплением, направляемого семантической сегментацией
Роботы, учащиеся ходить по лесу
Представьте себе маленького робота, который может самостоятельно пройти лесную тропу, лавируя между деревьями и камнями без GPS и без человека с джойстиком. В этой статье описана система, которая обучает таких роботов «видеть» тропы в густом лесу и принимать решения в каждый момент времени о том, как безопасно двигаться вперёд. Эта работа важна для будущих роботов, которые могли бы помогать в мониторинге лесов, предотвращении лесных пожаров, поисково-спасательных операциях и даже доставке на открытом воздухе в местах, где спутниковый сигнал слабый или отсутствует.
Почему леса так сложны для роботов
Леса — одни из самых трудных мест для автономных машин. Тропы могут быть узкими и извилистыми, грунт неровный, ветви и кусты часто перекрывают обзор, а высокие деревья делают GPS-сигналы ненадёжными. Традиционные методы навигации зависят от точных карт, устойчивого GPS или дорогих лазерных сенсоров и часто предполагают чёткие, структурированные пространства, такие как городские улицы или заводские цеха. В лесу эти предположения рушатся: тени, смена сезонов и густая растительность сбивают с толку простые системы зрения, тогда как управляемые по правилам контроллеры испытывают трудности при столкновении со всеми непредсказуемыми, «грязными» ситуациями, которые возникают на реальной тропе.
Три «мозга», работающие вместе
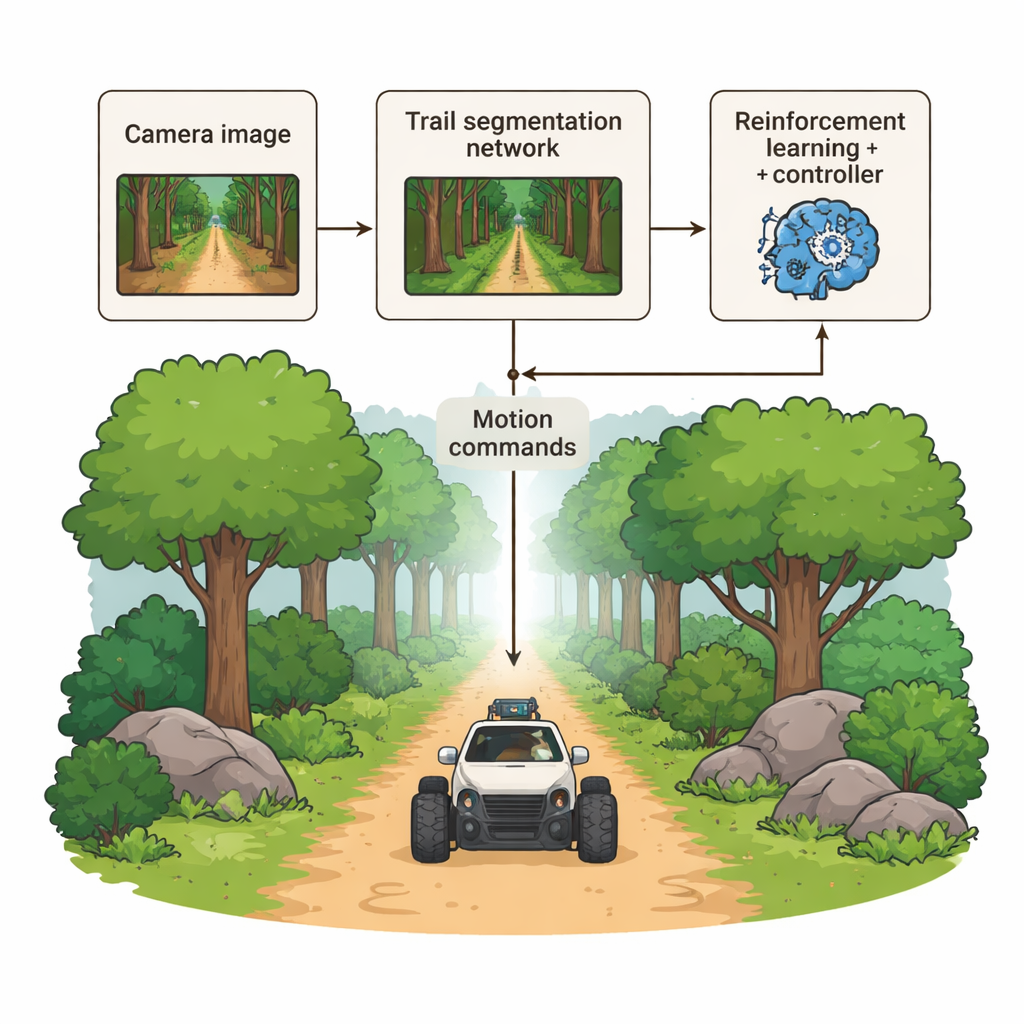
Авторы предлагают гибридную навигационную систему, в которой у робота три взаимодополняющих «мозга». Во-первых, глубокий модуль зрения анализирует каждое изображение с камеры и практически по пикселям отмечает, какие части соответствуют проходимой тропе. Во-вторых, модуль принятия решений на основе обучения использует методику обучения с подкреплением для выбора плавных команд рулевого управления и скорости, вознаграждая поведение, которое остаётся на тропе, избегает столкновений и эффективно достигает цели. В-третьих, классический контроллер преобразует предсказанную форму тропы в устойчивые движения колёс, сглаживая резкие манёвры и делая путь робота грациозным, а не рывковым. Вместо единой непрозрачной сети «от конца до конца» эти модули разделены, но тесно связаны, что позволяет инженерам понимать и отлаживать каждый этап.
Обучение зрения распознавать тропы
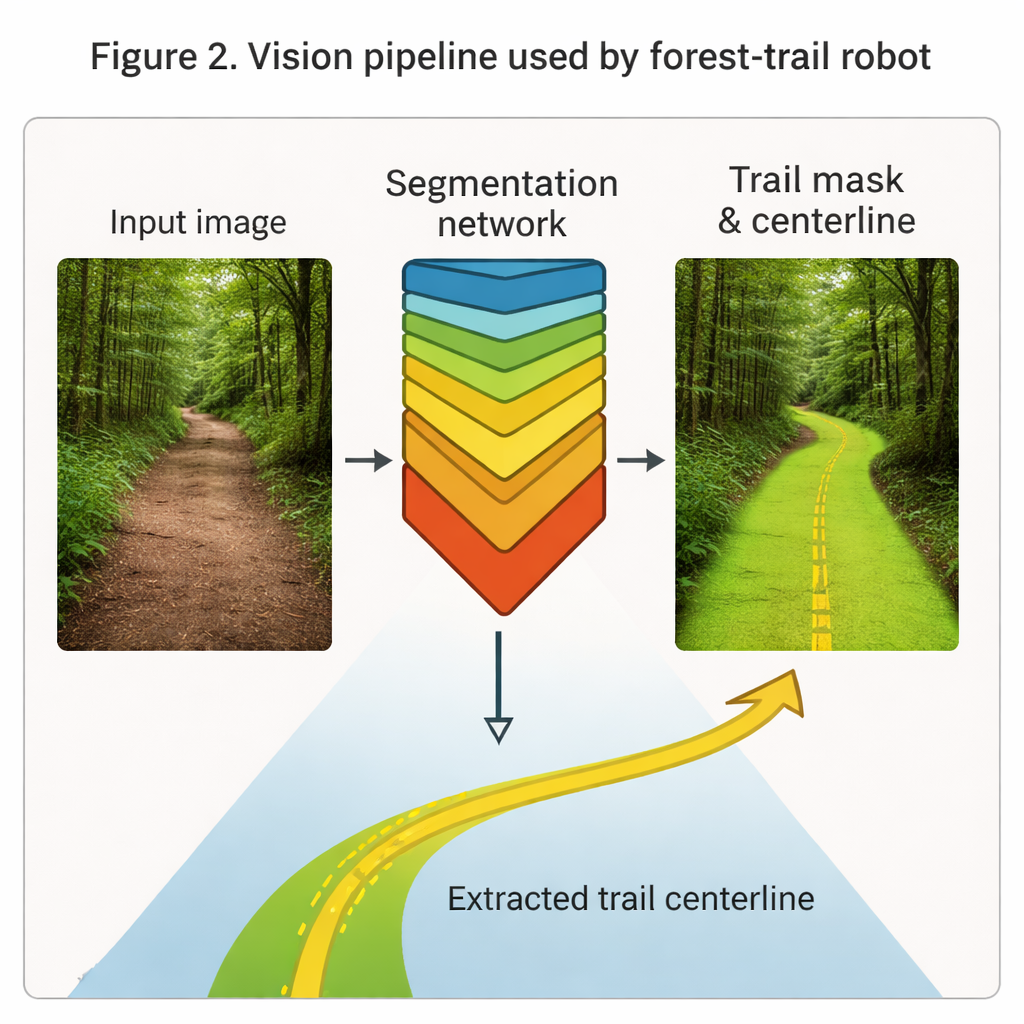
В основе «глаз» робота лежит глубокая сеть, известная как Mask R-CNN, здесь настроенная на выделение лесных троп на обычных цветных изображениях. Обученная на почти 24 000 размеченных кадров реальных походных съёмок, сделанных с человеческой высоты при разном освещении, погоде и типах троп, система научилась «закрашивать» область тропы на каждом кадре чистой маской. Из этой маски извлекается тонкая центральная линия, которая передаёт направление и кривизну пути впереди. В тестах модуль зрения показывает высокое совпадение с аннотациями человека и более 90% точности по пикселям, надёжно очерчивая тропы даже когда ветви или тени частично закрывают путь. Эти геометрические подсказки напрямую поступают как в модуль обучения, так и в контроллер в виде компактного описания «где находится тропа».
Обучение робота делать правильный выбор
Второй ключевой компонент — модуль принятия решений, который использует метод обучения с подкреплением. Вместо того чтобы прямо указывать, что делать, робот пробует действия в реалистичной симулированной лесной среде и получает вознаграждения за хорошие результаты и штрафы за плохие. Движение вперёд по тропе — хорошо; отклонение, столкновение с препятствиями или застревание — плохо. Примерно за 150 000 шагов обучения система постепенно обнаруживает стратегии, которые держат её в центре тропы, плавно проходят повороты и адекватно реагируют, когда на пути появляются ветки или камни. Чтобы движения были плавными и безопасными, обученные действия можно смешивать с командами классического контроллера, что особенно полезно на крутых поворотах или в шумных условиях.
Испытание системы
Чтобы оценить, насколько хорошо работает это сочетание, исследователи создали три детализированных виртуальных леса: один с узкими, захламлёнными тропами, другой со крутым, неровным рельефом и крупными препятствиями, и третий, заполненный развилками, тупиками и отвлекающими ложными тропами. В 90 испытаниях на этих картах робот достигал цели без столкновений примерно в 87% эпизодов, в среднем совершая только 0,2 столкновения за пробег и обычно оставаясь в пределах около 30 сантиметров от центра тропы. Он также проходил маршруты быстро и стабильно. Когда авторы поочерёдно убирали или упрощали модули, производительность резко падала — что показывает необходимость всех трёх компонентов. По сравнению с другими современными системами, включая те, которые используют лазерные сканеры, этот гибридный подход, основанный только на зрении, дал лучшее общее сочетание уровня успеха, точности и безопасности.
Что это значит для роботов в реальном мире
Для неспециалиста вывод таков: роботы становятся лучше в том, чтобы походить по тропам как осторожные, опытные туристы. Объединив сильное понимание визуального контекста («это тропа»), принятие решений на основе практики («эти манёвры раньше хорошо работали») и устойчивый механизм руления, предложенная система позволяет небольшому колёсному роботу ориентироваться в сложных лесах без карт и GPS. Хотя работа была проверена в симуляции и всё ещё сталкивается с проблемами, такими как экстремальное освещение и редкие типы троп, она предлагает практический план для будущих полевых роботов, которые смогут безопасно сосуществовать с людьми в дикой природе, помогая нам инспектировать леса, поддерживать спасательные команды и эффективнее управлять природными ресурсами.
Цитирование: Tibermacine, A., Tibermacine, I.E., Akrour, D. et al. Autonomous navigation in unstructured outdoor environments using semantic segmentation guided reinforcement learning. Sci Rep 16, 2633 (2026). https://doi.org/10.1038/s41598-026-36022-2
Ключевые слова: автономная навигация, лесная робототехника, компьютерное зрение, обучение с подкреплением, семантическая сегментация