Clear Sky Science · ru
Стратегия бесдатчикового управления положением на полной скорости для PMSM на основе улучшенного суперскручивающегося скользящего наблюдателя и оптимизации плавного перехода
Сохранение «умности» электродвигателей без дополнительного оборудования
От электромобилей до исполнительных механизмов в авиации — многие современные устройства используют особый тип электрического двигателя, называемый синхронным двигателем с постоянными магнитами (PMSM). Эти двигатели эффективны и мощны, но обычно требуют точных датчиков для отслеживания скорости вращения и положения ротора. Датчики повышают стоимость и могут выходить из строя в суровых условиях. В этом исследовании изучается, как обеспечить плавную и точную работу таких двигателей по всему диапазону скоростей без каких‑либо механических датчиков.
Почему отказ от датчиков так сложен
В типичном приводе PMSM небольшие датчики положения устанавливают на валу, чтобы сообщать системе управления точное положение ротора. Эта информация критична для подачи тока в обмотки в нужный момент — как точно рассчитанный толчок раскручивающейся карусели. Однако датчики могут быть хрупкими, громоздкими и дорогими. Инженеры давно пытаются заменить их бесдатчиковыми методами, которые выводят положение ротора по электрическим сигналам самого двигателя. Загвоздка в том, что ни один метод не работает хорошо на всех скоростях. На низкой скорости обычные электрические признаки слишком слабы, а на высокой скорости простые уловки становятся шумными и неточными. Преодолеть этот разрыв без толчков, вибраций или потери управления — постоянная задача.
Два умных способа «прислушаться» к мотору
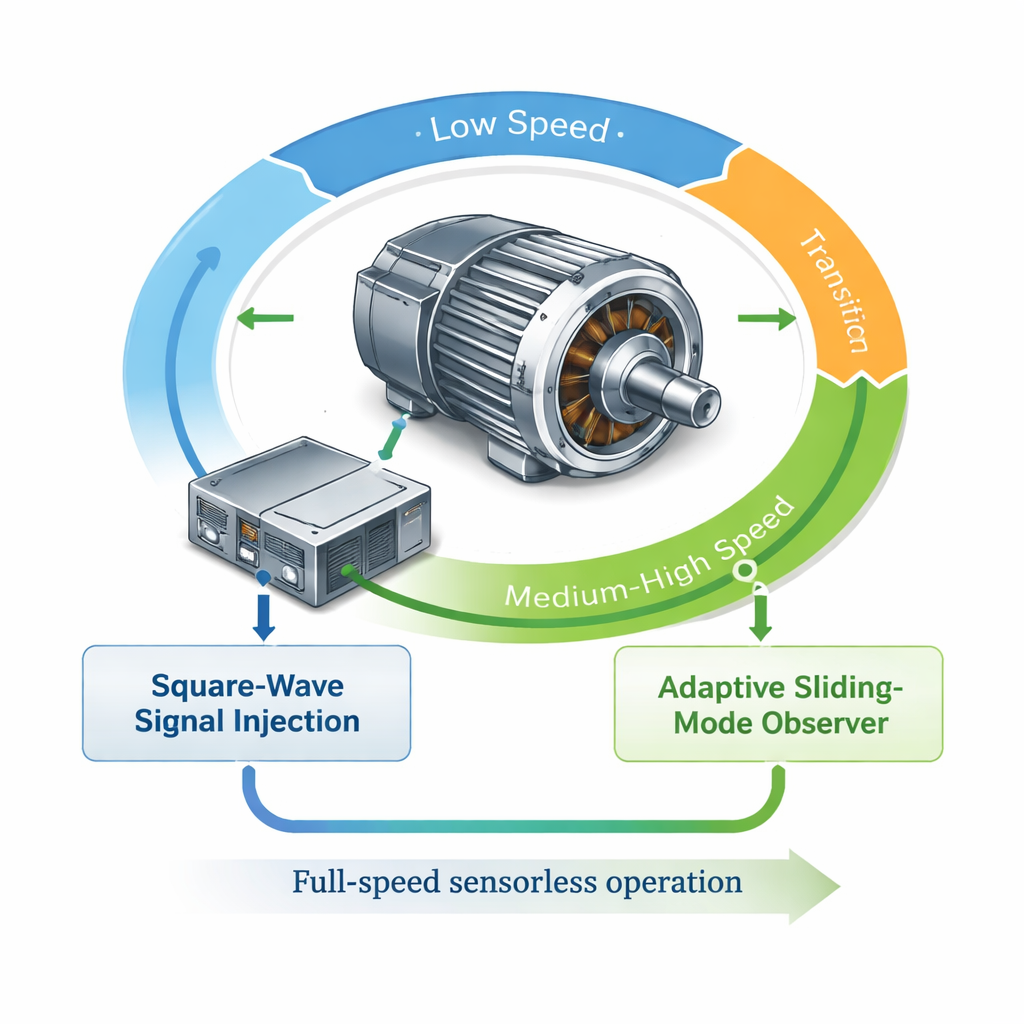
Чтобы покрыть весь диапазон скоростей, авторы комбинируют два взаимодополняющих бесдатчиковых метода. На низких скоростях, где естественная электрическая обратная связь двигателя слишком мала для надежного измерения, они целенаправленно вводят в обмотки быстрое квадратное напряжение. Ответ мотора зависит от угла ротора, поэтому, анализируя высокочастотный ток, контроллер может вывести положение ротора. Этот подход с вводом высокочастотного сигнала работает как отправка мягкого зондирующего импульса и чтение его «эхо». На средних и высоких скоростях мотор генерирует более сильную естественную обратную ЭДС. Здесь команда использует продвинутый математический наблюдатель, который отслеживает поведение мотора и оценивает положение и скорость ротора по измеренным напряжениям и токам.
Делая цифровой наблюдатель умнее и тише
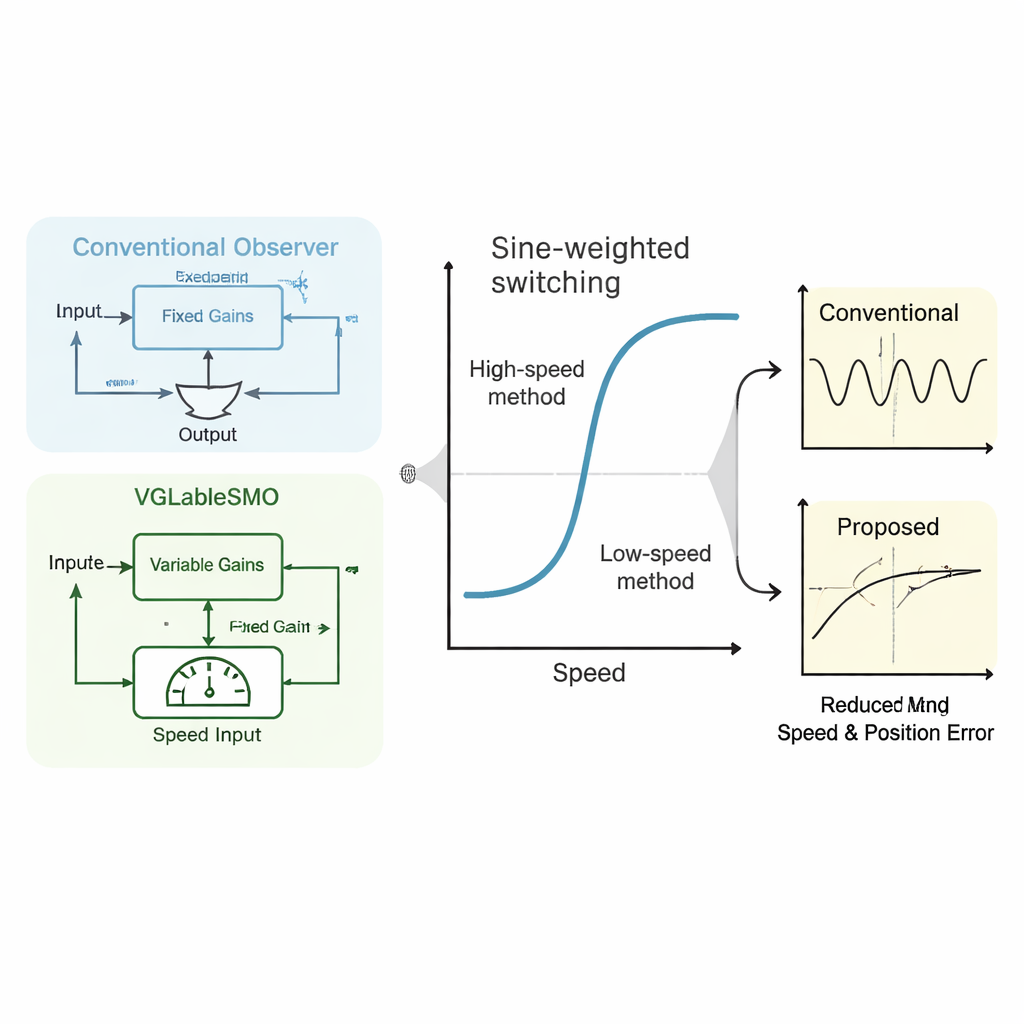
Ключевое нововведение в части для высоких скоростей — усовершенствованный наблюдатель, называемый линейным суперскручивающимся скользящим наблюдателем с переменным усилением (VGLSTSMO). Традиционные скользящие наблюдатели ценятся за устойчивость к шумам и возмущениям, но часто страдают от «дребезга» — быстрых мелких колебаний, которые могут перейти в момент и скорость. Они также опираются на фиксированные внутренние параметры, которые хорошо работают в одном режиме, но плохо — в другом. Предложенный наблюдатель автоматически подстраивает свои коэффициенты в зависимости от изменения скорости и добавляет корректирующий член, который мягко притягивает оценки к истинным значениям. Адаптивный механизм дополнительно уточняет оценку внутреннего напряжения мотора, повышая точность как скорости, так и положения. Моделирование на компьютере показывает, что этот более умный наблюдатель уменьшает погрешность угла на средне‑высоких скоростях примерно с 0,9 радиана до ~0,2 радиана и сокращает время установления после нагрузочных возмущений.
Сглаживание «рукопожатия» между низкими и высокими скоростями
Работа двух разных методов оценки поднимает ещё одну проблему: как плавно перейти между ними при ускорении мотора. Простейший подход — линейно ослаблять один метод и усиливать другой, но это всё ещё может вызывать скачки в моменте и скорости. Авторы предлагают более мягкую синусоидальную функцию взвешивания. В выбранной полосе перехода система управления постепенно переводит доверие от низкоскоростного метода к высокоскоростному наблюдателю по плавной волнообразной кривой вместо резкой линейки. Такое уточнённое смешивание заметно уменьшает скачки скорости и ошибки угла в процессе переключения, снижая переходную угловую ошибку и вдвое сокращая время установления ошибок.
Что это значит для реальных машин
В целом комбинированная стратегия — зондирование мотора на низких скоростях, использование адаптивного наблюдателя на более высоких скоростях и переключение между ними с помощью плавного синусного взвешивания — обеспечивает стабильное и точное управление по всему диапазону скоростей без механических датчиков. В моделях предложенный метод сохраняет малые значения превышения скорости и установившихся ошибок, одновременно избегая жёсткого дребезга, который может вызывать шум, износ и дискомфорт. Для практических применений это означает, что электромобили, промышленные приводы и силовые установки могут стать более надёжными, компактными и дешевыми в производстве, сохраняя точное управление движением без зависимости от хрупких датчиков, установленных на валу.
Цитирование: Zhang, X., Li, P., Wang, B. et al. Full-speed domain position sensorless control strategy for PMSM based on improved super-twisting sliding-mode observer and smooth transition optimization. Sci Rep 16, 5730 (2026). https://doi.org/10.1038/s41598-026-35994-5
Ключевые слова: бесдатчиковое управление мотором, синхронный мотор с постоянными магнитами, скользящий наблюдатель, ввод высокочастотного сигнала, системы электрического привода