Clear Sky Science · ru
Влияние структурных параметров на рабочую область параллельных роботов Delta и оптимизация траекторий для сортировки свежих чайных листьев
Роботы приходят на чайную фабрику
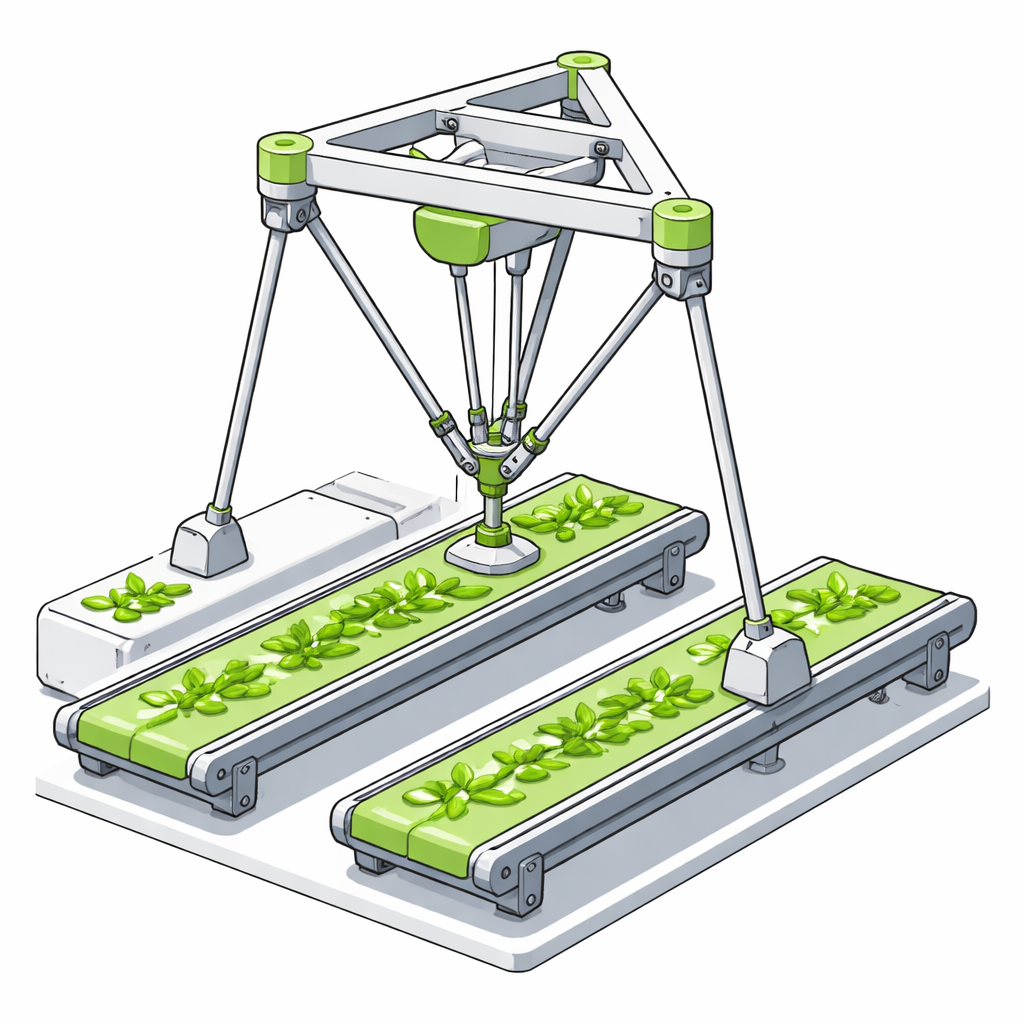
Свежие чайные листья хрупки: раздавить почку или помять лист — и вкус готового напитка ухудшится. Тем не менее ручная сортировка утомительна и медленна. В этой статье исследуется, как быстрый и лёгкий промышленный робот — так называемый дельта-робот — может быть настроен так, чтобы быстро и точно перемещаться над транспортными лентами с листьями, одновременно аккуратно и надёжно обращаясь с продукцией.
Почему чайные листья требуют особого обращения
В современном чайном производстве сортировка свежих листьев критична для качества и цены. Людям трудно поддерживать темп и стабильность, особенно в длительные смены. Дельта-роботы, широко применяемые для высокоскоростной упаковки, кажутся естественным выбором: они жёсткие, точные и способны мгновенно перемещаться на впечатляющих скоростях. Однако большинство прежних конструкций ориентировались на универсальные объекты — коробки или детали — а не на хрупкие чайные почки, заключённые в узкой зоне между двумя лентами. «Рабочая область» робота — трёхмерный объём, до которого он может дотянуться — должна соответствовать этой узкой зоне и обеспечивать специфическое воротоподобное движение: захват, подъём, перемещение и размещение, всё это без столкновений с собственными частями и без промахов по целям.
Как форма робота определяет зоны досягаемости
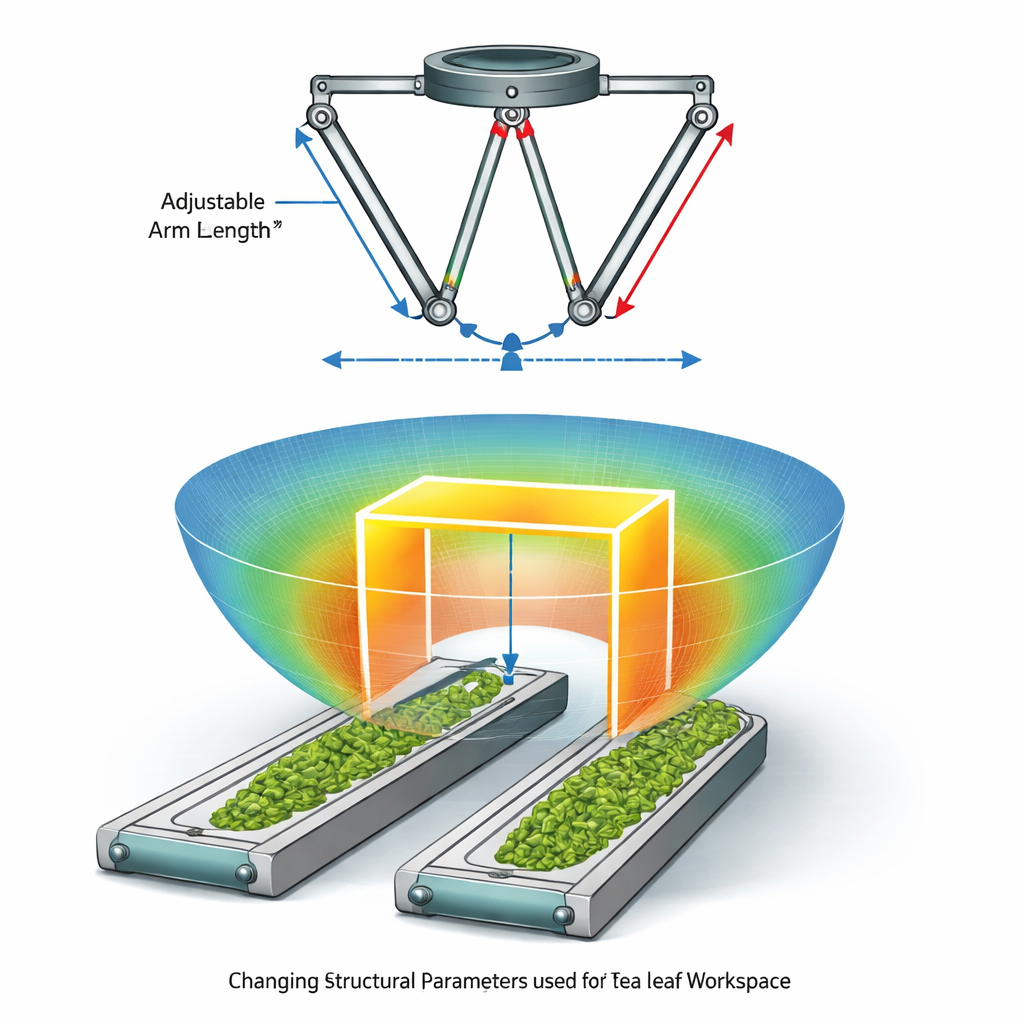
Авторы начинают с построения детальной математической модели движения дельта-робота. Они связывают углы трёх приводных сочленений с точным положением небольшой подвижной платформы, несущей присоску. С помощью прямих (углы → положение) и обратных (положение → углы) расчётов они определяют каждую точку, до которой исполнительный элемент может физически добраться при ограничении углов сочленений безопасным диапазоном. Записанные в MATLAB уравнения позволяют смоделировать полный объём достижимости и отобразить его с разных ракурсов в виде цветного, чашеобразного облака точек. Эта рабочая область затем служит основой для оценки, подходит ли та или иная механическая конфигурация для заданной траектории сортировки.
Тестирование многих вариантов с помощью виртуальных экспериментов
Вместо создания множества физических прототипов команда рассматривает четыре ключевых геометрических параметра как «ручки» дизайна: длину верхних рычагов (L), длину нижних рычагов (l), радиус фиксированного основания треугольника (R) и радиус подвижного треугольника (r). Они используют ортогональную планировку эксперимента, которая эффективно перебирает комбинации этих четырёх параметров по трём уровням каждая, в результате чего получают девять виртуальных роботов. Для каждого модель вычисляет общий объём рабочей области и показывает, как он пересекается со стандартизированным воротоподобным объёмом пути размером 200 мм в высоту, 400 мм в ширину и 200 мм в глубину. Это позволяет исследователям увидеть не только насколько велик каждый объём, но и покрывает ли он регион, по которому движутся чайные листья на лентах.
Какие размеры оказывают наибольшее влияние
Сравнивая девять смоделированных вариантов, исследование ранжирует степень влияния каждого структурного параметра на пригодную область досягаемости. Очевидным лидером является длина нижних (пассивных) рычагов: более длинные нижние рычаги значительно увеличивают рабочую область. Далее по значимости идёт длина верхних (активных) рычагов, которая тоже расширяет зону движения, но при чрезмерной длине может вызвать вибрации. Радиус основания оказывает умеренное влияние; при слишком широком основании подвижные рычаги чаще сталкиваются с рамой, что уменьшает реально используемый объём. Радиус подвижной платформы имеет наименее значительный эффект, но меньшая платформа всё же немного помогает, освобождая пространство для движения рычагов. Анализ размаха и дисперсии показывает, что хотя некоторые наборы параметров дают максимальный общий объём, они не обязательно покрывают узкую воротоподобную область, важную для сортировки чая.
Конфигурация, подходящая для чайной линии
Практически наиболее пригодной оказывается не та конфигурация, которая имеет наибольший общий объём, а та, рабочая область которой аккуратно охватывает воротоподобную траекторию. Одна конкретная комбинация — верхние рычаги 250 мм, нижние рычаги 400 мм, радиус основания 90 мм и радиус подвижной платформы 50 мм — полностью покрывает требуемую траекторию между двумя конвейерами, при этом робот остаётся компактным и стабильным. При высоте работы около 325 мм над опорной плоскостью робот достигает наибольшего практического размаха, чего более чем достаточно, чтобы охватить обе ленты и выполнить цикл захват–подъём–перемещение–размещение, не выходя за пределы безопасной зоны.
Что это означает для будущих чайных фабрик
Для неспециалистов ключевое послание таково: небольшие изменения в длинах звеньев робота и размерах платформы могут определить, станет ли машина просто эффектно двигаться в свободном пространстве или же будет надёжно работать на реальной производственной линии. Квантифицируя, как каждый структурный параметр формирует объём достижимости и его перекрытие с реалистичной воротоподобной траекторией, это исследование предлагает рецепт проектирования дельта-роботов, которые сортируют чайные листья быстро, точно и с минимальным повреждением. Тот же подход может быть использован при создании специализированных роботов для других продуктов питания или хрупких изделий, где одновременно требуются скорость, точность и бережное обращение.
Цитирование: Ren, C., Zheng, W. & Wang, R. Influence of structural parameters on the workspace of delta parallel robots and path adaptability optimization for tea fresh leaf sorting applications. Sci Rep 16, 6651 (2026). https://doi.org/10.1038/s41598-026-35969-6
Ключевые слова: дельта-робот, сортировка чайных листьев, рабочая область робота, пик-энд-плейс, промышленная автоматизация