Clear Sky Science · ru
Разработка и оценка системы позиционирования пациентов по поверхности для бора-нейтронной захватной терапии
Более точная прицельная установка для нейтронной борьбы с раком
Бора-нейтронная захватная терапия (BNCT) — перспективный метод лечения рака, который может избирательно повреждать опухолевые клетки, сохраняя при этом большую часть окружающей здоровой ткани. Чтобы эта точность принесла пользу, врачам нужно разместить пациента точно в нужной точке перед фиксированным нейтронным пучком — часто с погрешностью в пределах миллиметра. В статье описана новая система позиционирования, управляемая камерами и роботом, которая призвана сделать эту тонкую настройку быстрее, точнее и менее зависимой от навыков и суждений техника.
Почему позиционирование так важно
В отличие от многих современных лучевых установок, которые могут вращаться вокруг пациента и изменять форму своих рентгеновских пучков, BNCT опирается на массивный фиксированный источник нейтронов с ограниченными возможностями управления пучком. Двигаться должен пациент, а не пучок. Традиционно персонал пользуется лазерами, метками на коже и ручными перемещениями кушетки. Этот процесс медленный, сильно зависит от мастерства оператора и может приводить к небольшим ошибкам положения, которые изменяют дозу, получаемую опухолью и близлежащими органами. По мере открытия центров BNCT для лечения сложных опухолей головы, шеи и других труднодоступных зон эти ограничения становятся серьезным препятствием.
Высокотехнологичный помощник: камеры, ПО и робот
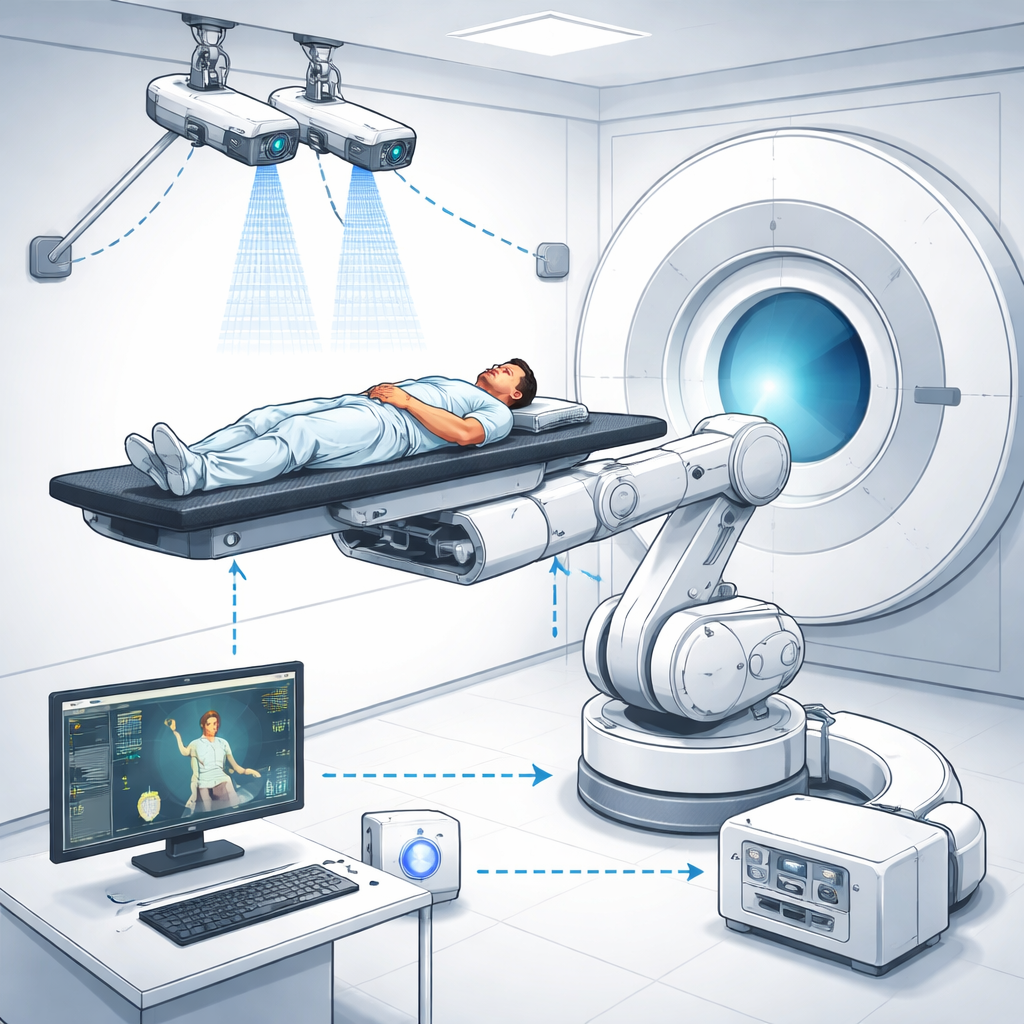
Для решения этой задачи исследовательская группа создала интегрированную систему Surface-Guided BNCT (SG-BNCT), которая объединяет три основных компонента: специализированную программу планирования лечения NeuMANTA, пару бинокулярных стереокамер и шестиосяной промышленный робот, несущий лечебную кушетку. В NeuMANTA врачи планируют BNCT на КТ-изображениях, указывая точку прохождения нейтронного пучка и три небольшие опорные точки (фидуциальные маркеры) на коже пациента. Эти маркеры задают положение пациента на плановых снимках и связывают план с координатами реальной процедурной комнаты через математические матрицы преобразования.
Как 3D-камеры видят и корректируют установку
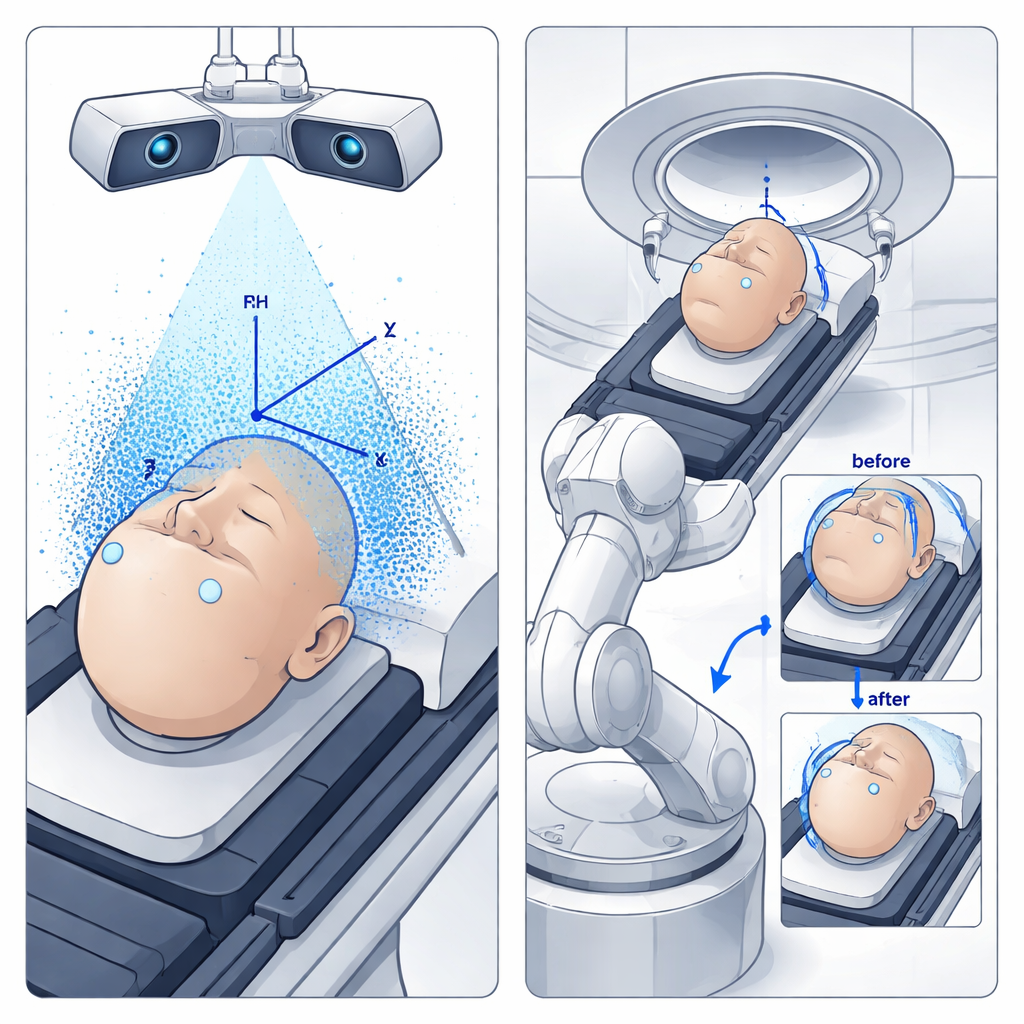
В процедурной комнате две камеры высокого разрешения наблюдают за пациентом под разными углами, подобно человеческим глазам. Система быстро находит те же фидуциальные маркеры на поверхности пациента, используя современный алгоритм обнаружения объектов (YOLO), обученный более чем на тысяче изображений. Сравнивая, как каждый маркер выглядит в левом и правом изображениях, компьютер воссоздает их 3D-позиции и строит детальное облако точек поверхности. По трём неколлинеарным маркерам восстанавливается система координат пациента и сравнивается с координатной системой, определённой в плане лечения. Любое несоответствие между плановым и фактическим положением преобразуется в команды по трансляции и вращению — всего шесть степеней свободы — для промышленного робота, который поддерживает кушетку.
Тестирование с имитатором пациента
Перед использованием на реальных пациентах систему проверяли на антропоморфном фантоме — модели формы человека с внутренними и поверхностными маркерами, видимыми как на КТ, так и камерами. В NeuMANTA создали несколько установок лечения с разными направлениями пучка, а затем попросили SG-BNCT воспроизвести эти планы, автоматически перемещая фантом в требуемое положение. Лазер, установленный в центре окна выхода нейтронного пучка, использовали как заменитель фактического пучка, чтобы напрямую измерять отклонение итоговой точки на фантоме от целевой, как вдоль направления пучка (расстояние источник-коже), так и в стороне в плоскости, перпендикулярной пучку.
Насколько близко система подошла?
В 24 экспериментальных установках ошибки позиционирования обычно были ниже 1 миллиметра в обоих направлениях, при этом худшие одноразовые погрешности достигали примерно 2–3 миллиметров вдоль оси пучка. Авторы связали эти остаточные расхождения с тремя основными факторами: толщиной слоёв КТ-сканирования, небольшими погрешностями калибровки стереокамер и незначительными погрешностями на уровне пикселя при детекции маркеров программным обеспечением. Важно, что система разработана для замкнутого цикла работы: она многократно перемеряет положения маркеров, обновляет 3D-выравнивание и командует дополнительными тонкими движениями робота до тех пор, пока оставшаяся ошибка не упадёт ниже заранее заданного порога. В этих итеративных тестах финальные отклонения стабильно уменьшались до значительно менее 1 миллиметра, достигая субмиллиметрового выравнивания как в глубину, так и в боковом направлении.
Что это значит для пациентов
Для пациентов, которые могут получить пользу от BNCT — особенно при опухолях в сложных или чувствительных областях — эта система позиционирования по поверхности с роботической поддержкой обещает более надёжные и эффективные процедуры. Связывая программное обеспечение планирования напрямую с камерами, видящими реального пациента, и с роботом, способным выполнять точные перемещения, метод снижает зависимость от ручной лазерной наводки и человеческих догадок. Хотя нынешняя версия слишком медленна для полноценного отслеживания движений в реальном времени и пока проведены только статические испытания, результаты показывают, что технология позволяет регулярно позиционировать пациента с субмиллиметровой точностью. При дальнейшем увеличении скорости и повышении радиационной стойкости оборудования этот подход может стать практической основой для более безопасных и стабильных BNCT-процедур в клинике.
Цитирование: Chen, J., Xie, QL., Ping, JJ. et al. Development and evaluation of surface-guided patient position system for boron neutron capture therapy. Sci Rep 16, 5818 (2026). https://doi.org/10.1038/s41598-026-35834-6
Ключевые слова: бора-нейтронная захватная терапия, позиционирование пациента, стереозрение, медицинская робототехника, навигация по поверхности