Clear Sky Science · ru
Применение алгоритма временной сверточной сети, объединённого с модулем внимания по каналам, для UWB‑позицирования в помещениях
Почему найти человека в помещении так сложно
Смартфонам, роботам и автоматизированным погрузчикам важно точно знать своё положение даже там, где GPS‑спутники не достают — внутри зданий. Ультраширокополосная радиосвязь (UWB) стала одним из ведущих кандидатов для этой задачи: она способна измерять расстояния с точностью до сантиметров. Но в реальных, загруженных помещениях с множеством стен, стекла и движущихся людей радиосигналы часто отражаются, искривляются или временно блокируются, что вызывает резкие скачки в определении положения. В этой статье рассматривается новый метод на основе искусственного интеллекта, который делает UWB‑позицирование значительно точнее и стабильнее в таких сложных средах.
Радиоимпульсы в переполненной комнате
Системы UWB определяют местоположение метки, измеряя, сколько времени занимает прохождение очень коротких радиоимпульсов между меткой и несколькими стационарными базовыми станциями. В простых, открытых пространствах подход «время прихода» работает хорошо. Но в помещении сигналы часто идут по непрямым путям — отражаясь от дверей, окон и людей — прежде чем достичь приёмника. Такие линии видимости, нарушенные препятствиями (NLOS), заставляют метку казаться дальше, чем она есть на самом деле. Традиционные решения опираются на тщательно настроенные математические фильтры или инструменты машинного обучения, которые сначала пытаются пометить каждый сигнал как чистый или искажённый. Хотя это помогает, такие методы либо сильно зависят от экспертной настройки, либо всё ещё испытывают трудности, когда люди движутся непредсказуемо по помещению.
Дать данным рассказать историю во времени
Исследователи предлагают другую стратегию: вместо того чтобы рассматривать каждое измерение расстояния отдельно, они анализируют, как показания меняются во времени, и позволяют модели глубокого обучения выучить эти закономерности. Их основной инструмент — временная сверточная сеть (TCN), тип нейронной сети, предназначенный для работы с временными рядами. В отличие от рекуррентных сетей, которые обрабатывают моменты последовательно, TCN использует одномерные свёртки и может параллельно просматривать длинные участки истории. Такая архитектура избегает распространённых проблем обучения и позволяет модели замечать тонкие, долгосрочные тренды — например, как проходящий человек между меткой и базовой станцией временно увеличивает измеряемое расстояние, а затем оно восстанавливается.
Обучение сети тому, чему следует уделять внимание
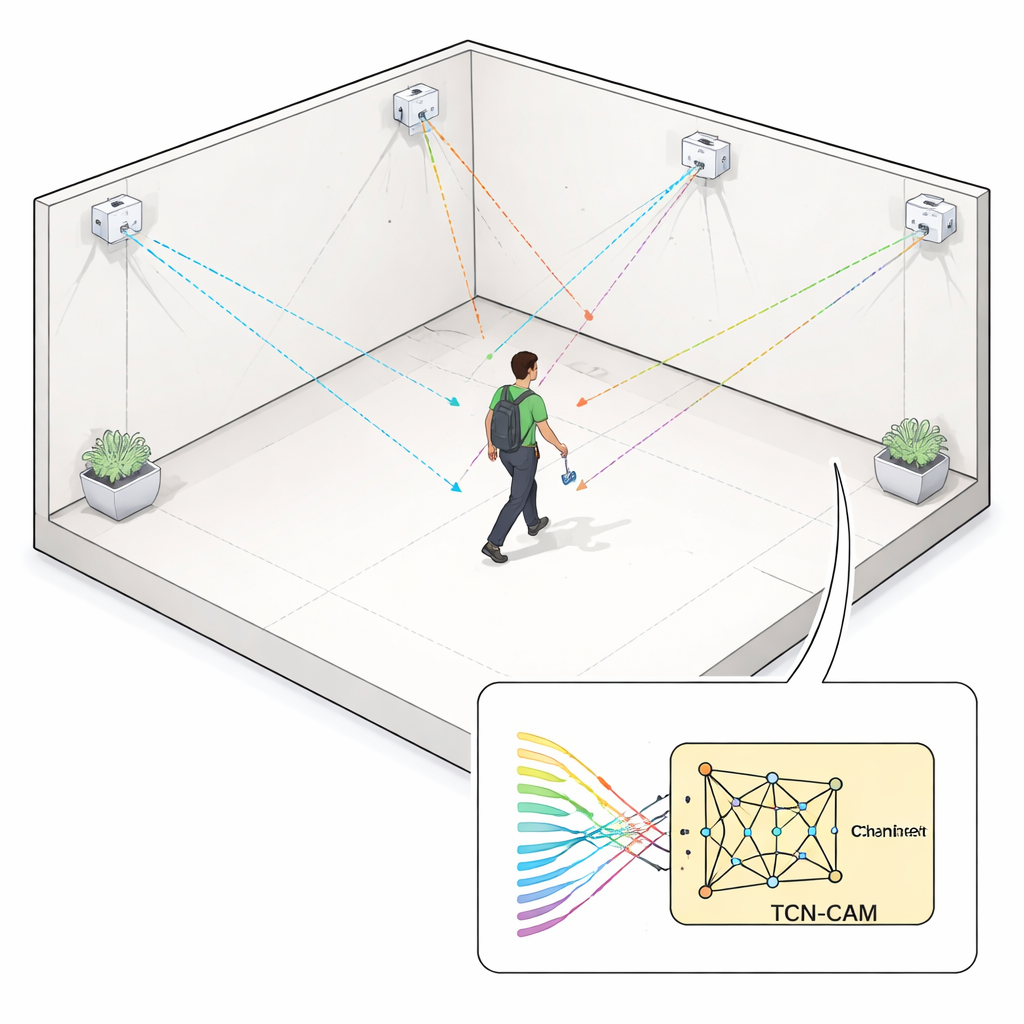
Поверх TCN команда добавляет модуль внимания по каналам (CAM). Каждая базовая станция формирует собственную последовательность измерений расстояния, и не все они одинаково надёжны в каждый момент времени. CAM учится присваивать этим потокам разные веса: усиливать те, что выглядят последовательными, и понижать значение тех, которые искажены отражениями или блокировками. В совокупности сеть TCN‑CAM принимает сырые, зашумлённые расстояния от шести базовых станций и выдаёт лучшую оценку трёхмерных координат метки в одном сквозном шаге, без отдельного этапа классификации сигналов.
Тестирование в имитированном шуме и в реальных коридорах
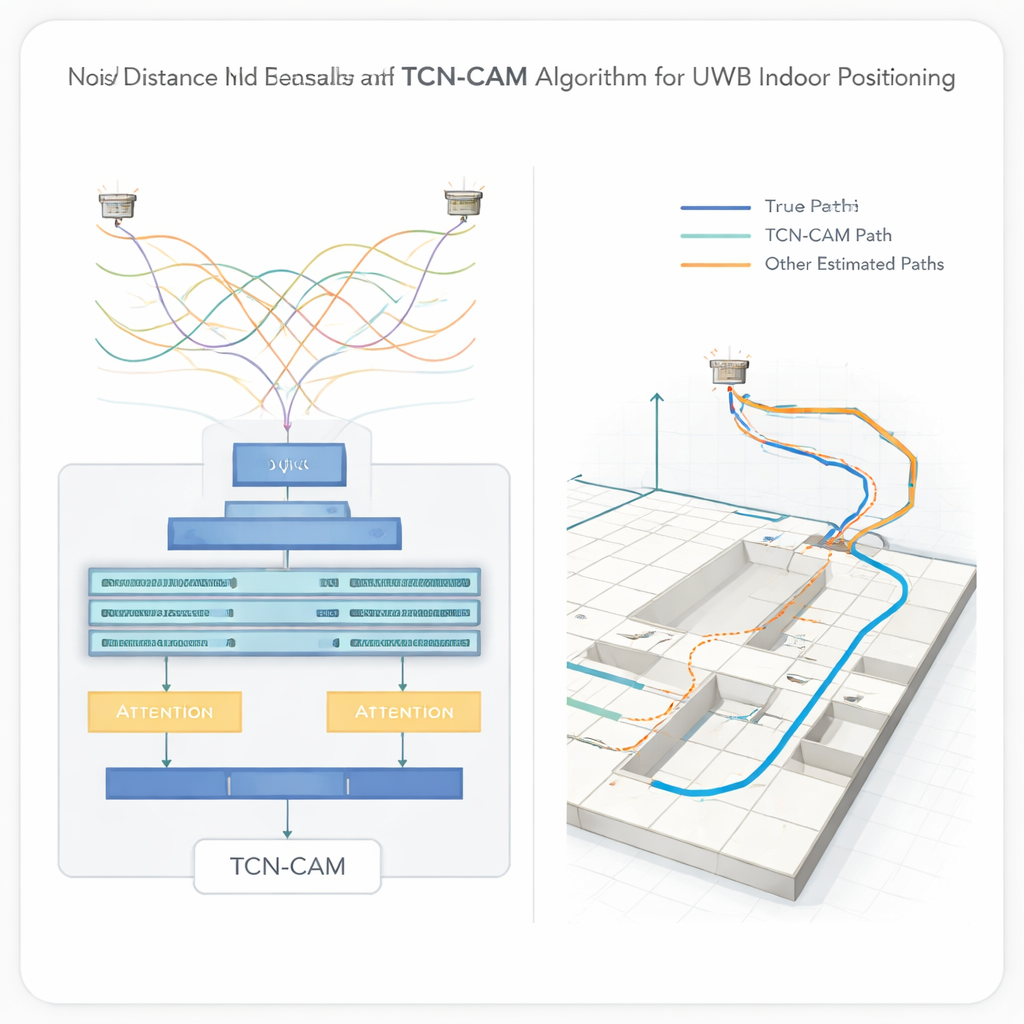
Чтобы проверить эффективность метода, авторы сначала сгенерировали тысячи виртуальных позиций внутри помещений и смоделировали UWB‑измерения с различными уровнями добавленного шума и NLOS‑ошибок. Они сравнили подход TCN‑CAM с тремя конкурентами: сетью LSTM с механизмом внимания, стандартной TCN и свёрточной сетью с вниманием по каналам. По мере усиления имитированных помех ошибки росли у всех методов, но TCN‑CAM постоянно показывала наименьшие ошибки и более компактное распределение результатов, что указывает как на большую точность, так и на более высокую надёжность. В самых жёстких условиях теста она сокращала средние ошибки позиционирования примерно на одну четверть до одной половины по сравнению с другими подходами.
От лаборатории к реальным перемещениям
Затем команда перешла к реальному тестовому участку в помещении, оснащённому шестью UWB‑базовыми станциями, высокоточным геодезическим прибором и людьми, которые специально ходили, вызывая блокировки сигналов. Новый алгоритм определял положение движущейся метки со средней ошибкой всего 3,32 сантиметра. Это было примерно на 19% лучше, чем простая TCN, на 25% лучше по сравнению со свёрточной сетью с вниманием и впечатляющие 76% лучше по сравнению с подходом на базе LSTM. Результаты TCN‑CAM не только плотнее сосредоточены вокруг истинного пути, но и точнее отслеживают фактическую трёхмерную траекторию метки по всем направлениям.
Что это значит для повседневных технологий
Для неподготовленного читателя вывод прост: предоставив умной модели наблюдать, как UWB‑показания расстояний меняются во времени, и научиться, каким сигналам доверять в каждый момент, можно сделать позиционирование в помещениях гораздо более точным и менее подверженным скачкам, даже когда люди движутся и блокируют радиоканал. Хотя метод требует дообучения при переносе базовых станций, он предлагает мощное и практичное решение для фабрик, больниц, складов и «умных» зданий с фиксированной инфраструктурой. По мере того как аналогичные методы глубокого обучения совершенствуются и начнут объединять UWB с другими датчиками, устройства в помещении вскоре смогут определять своё местоположение почти так же надёжно, как ваш телефон на улице.
Цитирование: He, L., Lian, Z., Núñez-Andrés, M.A. et al. Application of a temporal convolutional network algorithm fused with channel attention module for UWB indoor positioning. Sci Rep 16, 6305 (2026). https://doi.org/10.1038/s41598-026-35802-0
Ключевые слова: помещенческое позиционирование, ультраширокополосный (UWB), глубокое обучение, анализ временных рядов, отслеживание местоположения