Clear Sky Science · ru
Динамический глобальный трекер для онлайн-многокамерного многотранспортного отслеживания
Почему умные дорожные камеры важны
Каждый, кто застревал в пробке или переживал из‑за ДТП, ощущал ограничения современных транспортных систем. В крупных городах устанавливают сети камер вдоль шоссе и на перекрёстках для наблюдения за движением в реальном времени. Но заставить эти камеры работать координированно — плавно отслеживать один и тот же автомобиль от одной камеры к другой — оказывается довольно сложно. В этом исследовании предложен новый подход к отслеживанию автомобилей сразу в нескольких камерах, обещающий более быструю и надёжную систему мониторинга, которая может повысить безопасность дорог и оперативность управления трафиком.
Проблемы современных систем отслеживания
Традиционные системы обрабатывают каждую камеру почти как отдельный мир. Сначала в каждом видео обнаруживают транспортные средства, затем строят короткие траектории внутри поля зрения одной камеры. Лишь после записи продолжительных фрагментов пытаются «сшить» эти траектории между камерами, используя тяжёлые алгоритмы кластеризации и вручную заданные правила о планировке дорог и расположении камер. Такой офлайн‑подход медленен, требует много вычислительных ресурсов и плохо справляется при изменениях в сцене, перестановке камер или добавлении новых точек обзора. Также он испытывает трудности, когда камеры видят одно и то же транспортное средство под сильно разными масштабами и углами — один и тот же автомобиль может выглядеть как два совершенно разных объекта.
Новый подход: отслеживать всё в реальном времени
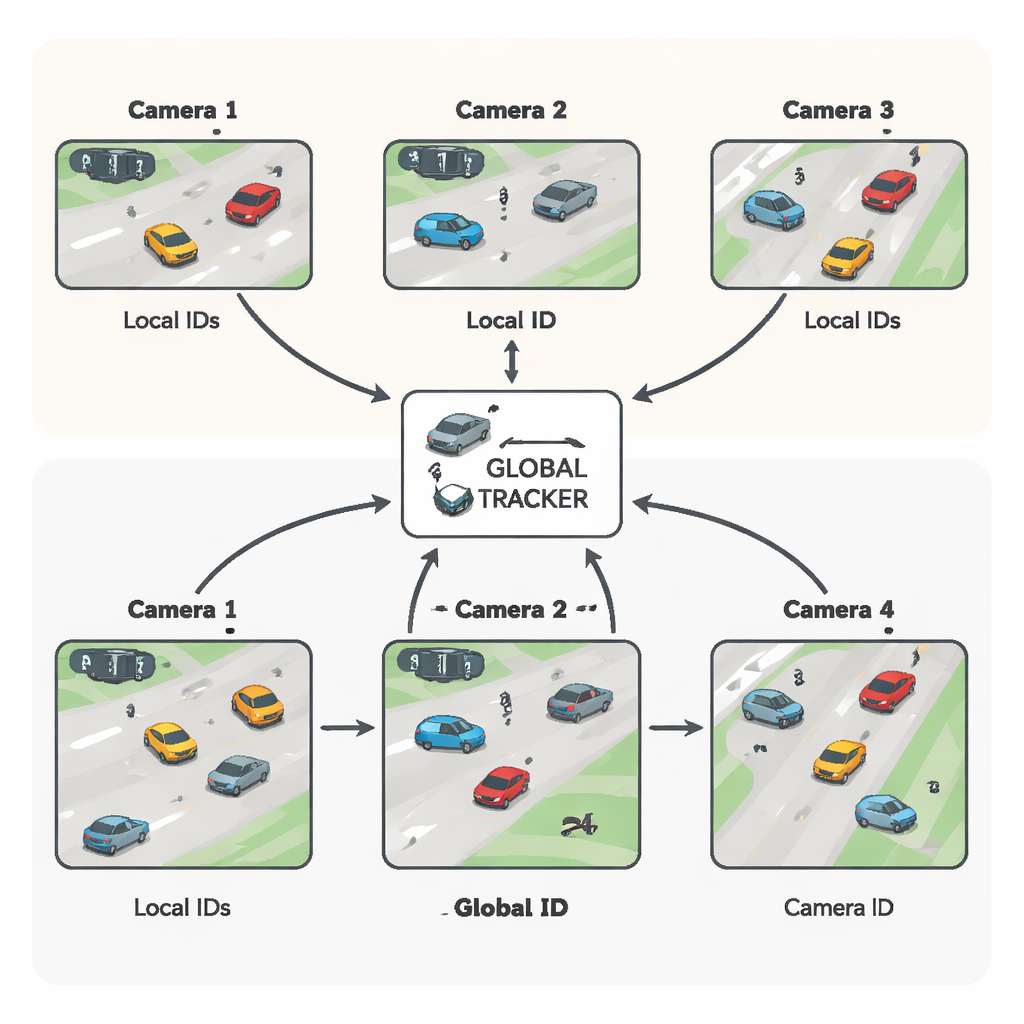
Исследователи предлагают новую архитектуру под названием Dynamic Global Tracking (DGT), разработанную с прицелом на работу в реальном времени. Вместо того чтобы ждать окончания записи и затем связывать траектории, DGT строит эти связи «на ходу». Каждая камера по‑прежнему детектирует машины и формирует короткие внутрикамерные треки, но как только эти треки обновляются, их немедленно сравнивают с треками из других камер. Классический алгоритм сопоставления решает, принадлежат ли два трека из разных видов одному и тому же автомобилю. Этот онлайн‑поэтапный процесс заменяет масштабную кластеризацию по всем прошлым данным, снижая вычислительную нагрузку и давая возможность идти в ногу с живым трафиком.
Распознавание одного и того же автомобиля с разных ракурсов
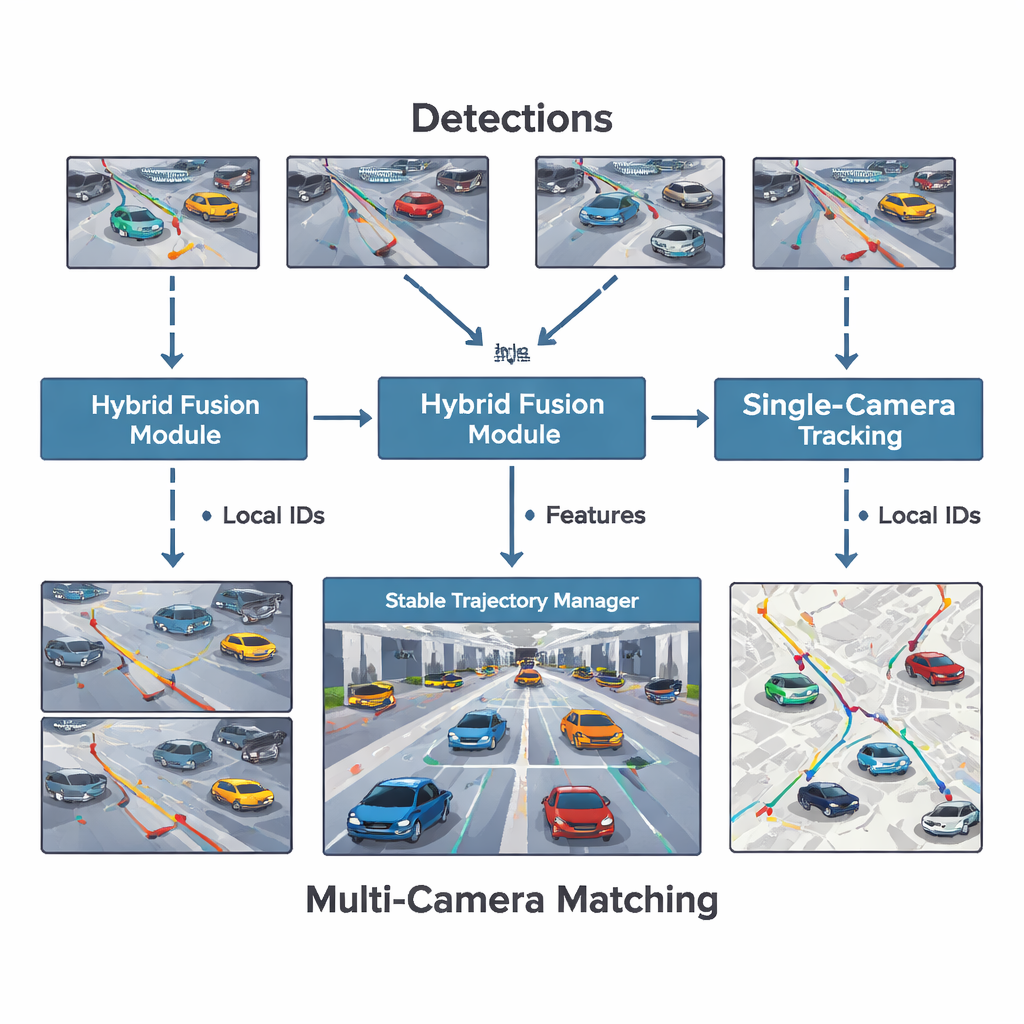
Ключевая сложность в том, что один и тот же автомобиль может быть крупно и детально виден в одной камере, а в другой — крошечным и размытым, либо освещён по‑разному в туннеле и на открытой дороге. Чтобы справиться с этим, DGT включает Гибридный Модуль Слияния (Hybrid Fusion Module), который сочетает мелкие детали и более широкий контекст каждого изображения. Кадры обрабатываются двумя путями одновременно: одна ветвь фокусируется на чётких мелкомасштабных признаках, таких как контуры и текстуры, в то время как другая выделяет более глобальные паттерны и контекст. Затем система объединяет оба представления в единое, стабильное описание внешнего вида транспортного средства. Тесты показывают, что такой подход поддерживает высокую уверенность системы даже при резких изменениях масштаба или чёткости автомобиля между камерами.
Поддержание стабильных и надёжных траекторий
DGT также вводит Менеджер Стабильных Траекторий, выполняющий роль центра контроля качества для решений об отслеживании. Он фильтрует неопределённые детекции, управляет тем, как долго автомобиль может скрываться за другим транспортом или препятствием, прежде чем считаться «ушедшим», и удаляет объекты, не меняющие положения со временем, такие как припаркованные машины или дорожные барьеры. Тщательно подобранные пороги по времени и движению позволяют системе отличать автомобиль, кратковременно скрывшийся в туннеле, от того, который действительно покинул сцену или перешёл в поле зрения другой камеры. В совокупности эти правила помогают поддерживать согласованные идентификаторы для каждого транспортного средства, сокращая резкие прыжки, потери или ошибочные слияния треков.
Что это даёт на обычных дорогах
В масштабных испытаниях как в китайском туннеле на шоссе, так и на оживлённом американском перекрёстке DGT показал высокую точность при скорости работы, достаточной для реального времени. В отличие от многих ранних систем, настроенных под один тип сцены, DGT справился как с перекрывающимися, так и с неперекрывающимися видами камер без необходимости детальной ручной информации о планировке дорог. Для водителей и жителей городов такая надёжная и гибкая система отслеживания означает, что центры управления движением смогут быстрее реагировать на аварии, заторы или аномальное поведение, имея более чёткое и непрерывное представление о перемещении транспортных средств по сети дорог и камер.
Цитирование: Chen, X., Chan, S., Bin, G. et al. Dynamic global tracker for online multi camera multi vehicle tracking. Sci Rep 16, 6101 (2026). https://doi.org/10.1038/s41598-026-35768-z
Ключевые слова: многокамерное отслеживание транспортных средств, интеллектуальные транспортные системы, мониторинг дорожного движения в реальном времени, компьютерное зрение, умные города