Clear Sky Science · ru
YOLO11-WLBS: эффективная модель для обнаружения дефектов дорожного покрытия
Почему важно улучшать проверки дорог
Каждая трещина и выбоина на дороге — это не только некрасиво: они сокращают срок службы покрытия, повреждают автомобили и способствуют авариям. Сегодня многие дороги по‑прежнему осматривают люди, медленно проезжая или проходя с планшетами и простыми камерами, что занимает много времени, дорого и легко приводит к ошибкам. В этом исследовании представлена YOLO11‑WLBS — более умная и лёгкая система компьютерного зрения, способная в реальном времени обнаруживать различные типы повреждений дорожного покрытия даже на смартфоне или дроне, что обещает более быстрый и безопасный ремонт дорожной сети.
От медленных патрулей к умным камерам
С ростом трафика и расширением дорожной сети дефекты — поперечные и продольные трещины, «аллигаторные» трещины, косые трещины, выбоины и ремонтные заплатки — встречаются всё чаще. Традиционные инспекции — обходы, проезды или простая обработка изображений — сильно зависят от человеческого суждения и слабо работают при плохом освещении или в загромождённой сцене. За последнее десятилетие глубокое обучение и, в частности, семейство сетей YOLO изменили анализ изображений, научившись выделять закономерности прямо из исходных снимков. Ранние системы на основе YOLO улучшали точность, но сталкивались с основной дилеммой: достаточно точные модели часто были слишком большими и медленными для работы в реальном времени на дронах, автомобилях или портативных устройствах.
Отлаженный двигатель на базе YOLO11
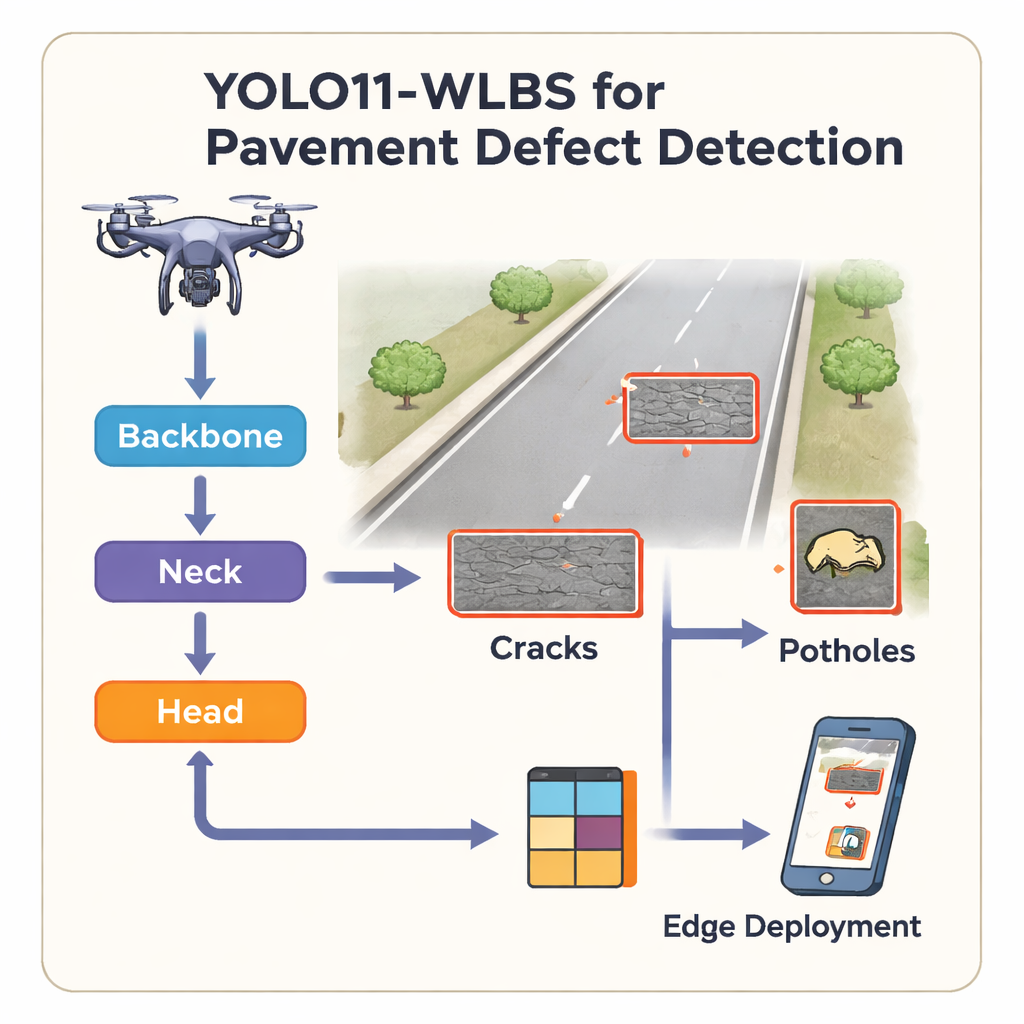
Авторы берут за основу YOLO11 — современную сеть для обнаружения объектов, уже сбалансировавшую скорость и точность, и адаптируют её к особенностям дорожных покрытий. Их улучшенная модель, названная YOLO11‑WLBS, сохраняет привычную трёхступенчатую архитектуру — «backbone» для извлечения признаков, «neck» для объединения информации на разных масштабах и «head» для построения рамок и меток вокруг дефектов — но добавляет четыре внимательно подобранных усовершенствования. В совокупности эти дополнения повышают чувствительность модели к тонким трещинам, улучшают работу с дефектами разных размеров и уменьшают лишние вычисления, чтобы модель эффективно работала на устройствах на периферии сети.
Четыре умных приёма для обнаружения трещин
Первое улучшение использует вейвлет‑основанную свёртку, чтобы подчеркнуть высокочастотные детали — резкие перепады яркости, очерчивающие трещины и мелкие отверстия — без раздувания модели. Это помогает системе замечать блеклые, тонкие или неправильной формы дефекты, которые стандартные фильтры могут пропустить. Затем шаг «лёгкого адаптивного извлечения» реорганизует карты признаков так, чтобы сеть сосредотачивала вычисления на наиболее информативных каналах, сокращая общее число параметров примерно на четверть. Двунаправленная пирамидальная структура признаков позволяет информации течь вверх и вниз между грубыми и тонкими масштабами, улучшая распознавание как крошечных трещин, так и более крупных связанных повреждений. Наконец, простой механизм внимания выделяет важнейшие области на каждой карте признаков, направляя детектор к реальным дефектам и отвлекая его от таких помех, как дорожная разметка, тени или пятна.
Доказательства эффективности в реальных условиях
Чтобы проверить YOLO11‑WLBS, команда обучила и оценивала модель на высокоразрешённых дроновских снимках реальных покрытий, покрыв более десяти тысяч размеченных дефектов в шести категориях. По сравнению с оригинальным YOLO11 новая модель повышает precision с 0.853 до 0.947 и recall с 0.698 до 0.895, то есть уменьшает число ложных тревог и реже пропускает дефекты. Общая метрика обнаружения (mAP@0.5) выросла на 12.2%, тогда как количество параметров сократилось примерно на 25.5%. Система остаётся точной при слабом и сильном освещении, а также при размытых или пониженных по разрешению изображениях, хорошо переносится на отдельный датасет с дронов с другими ракурсами и низким разрешением. Авторы даже внедрили полностью квантованную версию на Android‑смартфоне, добившись почти 30 кадров в секунду для живого видеопотока с обнаружением нескольких типов трещин.
Что это значит для водителей и городов
Проще говоря, YOLO11‑WLBS — это более быстрая и острая «пара глаз» для наших дорог. Сочетая улучшенное выделение краёв, более разумное использование ёмкости модели, мульти‑масштабное слияние признаков и лёгкое внимание, она находит больше дефектов, работая на скромном оборудовании, таком как дроны и телефоны. Это делает практичным частое сканирование длинных участков покрытия, раннее выявление проблем и планирование ремонтов более эффективно — без необходимости отправлять большие бригады в поток транспорта. Хотя модель по‑прежнему несколько затрудняется с редкими дефектами, такими как выбоины — в основном из‑за недостатка примеров в обучающем наборе — она даёт прочную основу для будущих систем, которые не только обнаруживают повреждения, но и оценивают их степень, помогая городам к более безопасному и экономичному обслуживанию дорог.
Цитирование: Lin, J., Wang, P., Ruan, Y. et al. YOLO11-WLBS: an efficient model for pavement defect detection. Sci Rep 16, 5284 (2026). https://doi.org/10.1038/s41598-026-35743-8
Ключевые слова: обнаружение дефектов дорожного покрытия, обнаружение трещин на дорогах, YOLO11-WLBS, инспекция с дрона, edge AI