Clear Sky Science · ru
Исследование океанских глубин: раскрытие скрытых сокровищ с помощью Интернета вещей и ансамблево-гибридной глубокой модели обучения
Почему исследование морского дна становится высокотехнологичным
Глубокий океан и грунт под ним скрывают кабели, трубопроводы, древние руины и хрупкие экосистемы. Но мутная вода, вихревые наносы и слабые сигналы делают удивительно трудным выяснение того, что находится в глубине. В этой статье описан новый подход к объединению множества типов датчиков с искусственным интеллектом, благодаря которому подводные роботы и системы мониторинга могут обнаруживать важные объекты точнее, быстрее и с меньшим энергопотреблением. Эта работа может помочь защитить морскую жизнь, обезопасить инфраструктуру и открыть новые рубежи исследований.
Много датчиков — единая картина глубины
Современное оборудование для подводного обнаружения обычно опирается на одно «чувство»: звуковой импульс сонарa, видеокамеру или один тип грунтового датчика. Каждый из них хорошо работает в идеальных условиях, но дает сбои, когда вода помутнела, свет исчез или появился шум. Исследователи, напротив, представляют океан как пространство, наблюдаемое Интернетом вещей: небольшими сетевыми устройствами, которые слушают, смотрят и «ощупывают» по-разному. Их система объединяет данные с камер, радиолокаторов для проникновения в грунт, сейсмических датчиков вибрации, термопротоколов и электромагнитных детекторов в единый поток для анализа. Сливая эти представления, система способна распознать объект даже тогда, когда один из датчиков запутался в иле, пузырях или отражениях. 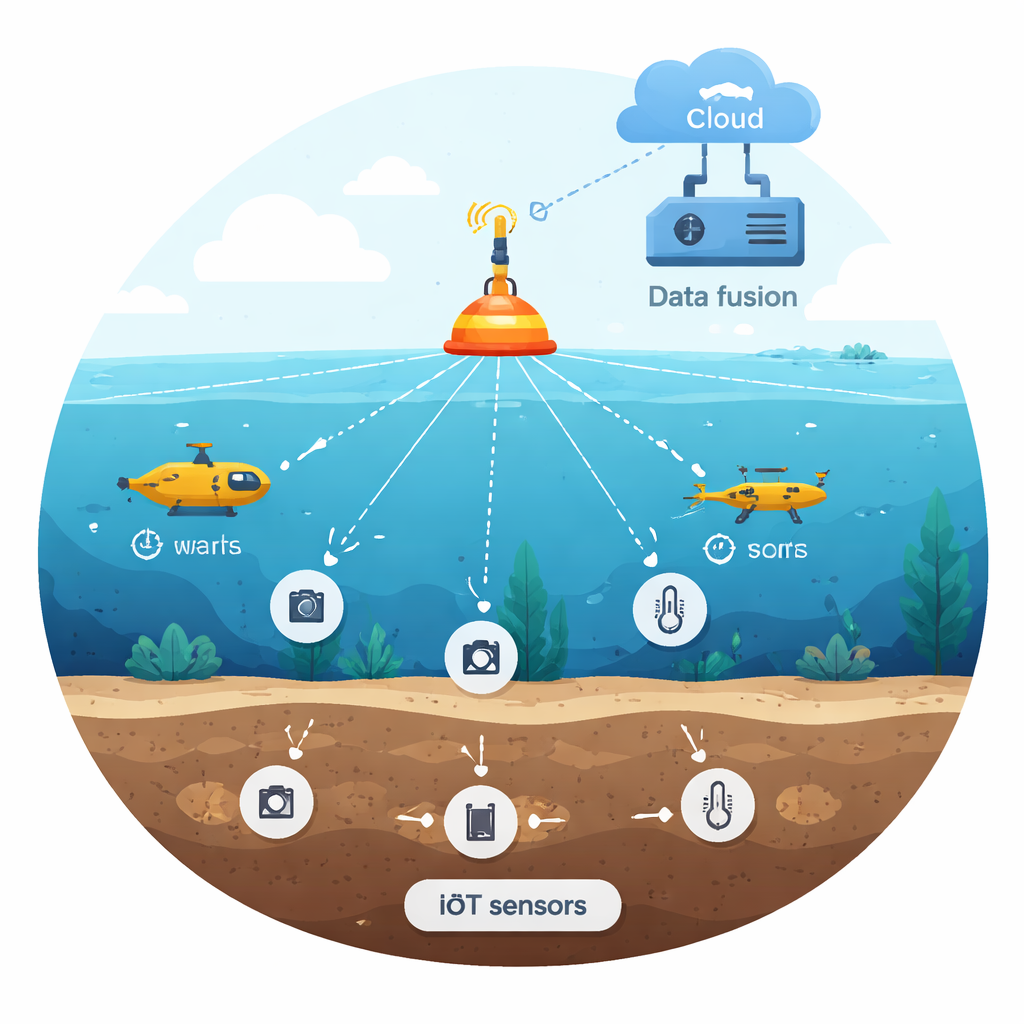
Очистка шумных сигналов до их поступления в «мозг»
Сырые данные, собранные под водой, далеки от идеала. Они усеяны случайными всплесками, пропусками и странными показаниями от перемещающихся потоков, животных и электронных помех. Прежде чем любой умный алгоритм примет решение, авторы прогоняют эти данные через аккуратную линию очистки. Они используют медианные фильтры, чтобы сгладить резкий шум без размытия реальных признаков, статистические проверки для обнаружения и удаления выбросов, а также синхронизацию, чтобы показания разных устройств совпадали по времени. Они также масштабируют значения, чтобы сильный датчик не заглушал более слабые, преобразуют одномерные радиолокационные следы в изображения и применяют современные методы сокращения размерности, чтобы свести сотни измерений к меньшему, более информативному набору. Все это сделано для того, чтобы обучающая система видела четкую картину вместо хаотичного размыва.
Гибридный двигатель обучения, который видит закономерности и принимает решения
В основе подхода лежит то, что авторы называют ансамблево-глубокой гибридной моделью обучения (Ensembled Deep Hybrid Learning, EDHL). Она состоит из двух основных частей, играющих дополнительные роли. Во-первых, глубокая нейронная сеть в стиле Inception выступает «глазами», сканируя изображения датчиков одновременно на нескольких масштабах, чтобы уловить как мелкие детали, например кабель, так и более крупные формы, например выступы скал. Из этого она формирует богатые числовые описания каждой сцены. Во-вторых, классификатор на основе градиентного бустинга играет роль «комитета решений». Он строит множество небольших решающих деревьев, которые поочередно исправляют ошибки друг друга, постепенно приближаясь к правильному ответу о том, какой объект присутствует. Шаг отбора признаков выбирает только наиболее информативные сигналы, что сокращает использование памяти и ускоряет финальную систему без потери существенной информации. 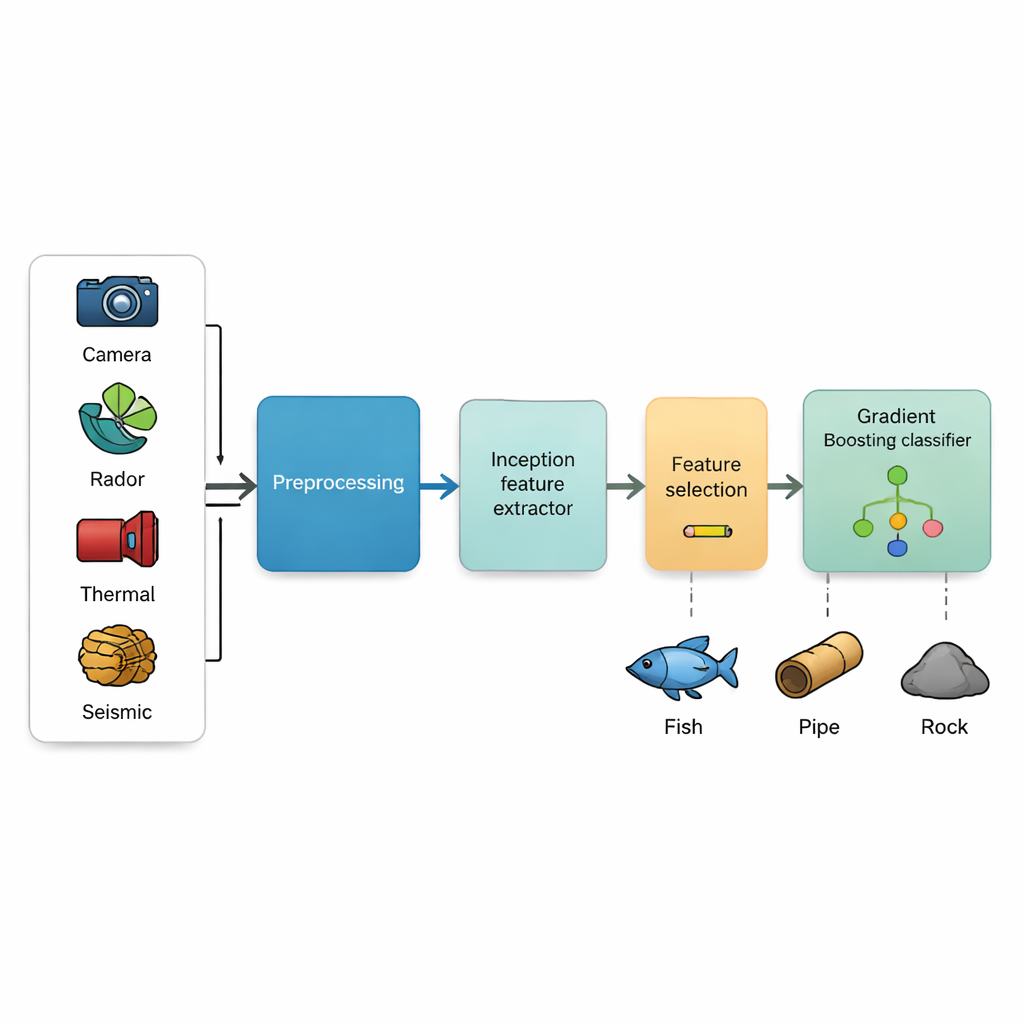
Проверка системы на практике
Чтобы понять, работает ли их конструкция на практике, команда обучала и оценивала её на большой публичной коллекции подводных изображений, включающей рыбы, кораллы, губки, морскую траву, раковины, ракообразных и другие сцены морского дна. Они сравнили множество вариантов очистки данных и отбора признаков и сопоставили свою модель с хорошо известными системами глубокого обучения, такими как классические сверточные сети, ResNet, DenseNet, EfficientNet, капсульные сети и даже модели на базе трансформеров. Конфигурация EDHL, особенно в сочетании с тщательным удалением шума и отбором признаков на основе корреляций, достигла точности выше 98% с гораздо меньшим числом ложных срабатываний и пропущенных объектов по сравнению с конкурентами. Важно, что она сохранила эту высокую производительность при работе на скромном оборудовании, сопоставимом с тем, что можно использовать на краевых устройствах, а не только на мощных серверных системах.
Что это значит для будущих океанских исследований
Для неспециалистов основной вывод таков: авторы создали более умную систему «чувствовать‑и‑думать» для подводного мира. Объединив разнообразные датчики Интернета вещей с гибридным обучающим движком, они показывают, что можно очень надежно обнаруживать и классифицировать объекты морского дна без громоздких компьютеров и идеальных условий видимости. В будущем такого рода технологии смогут помочь паркам подводных роботов картировать океанское дно, мониторить хрупкие среды обитания, отслеживать загрязнения и инспектировать зарытую инфраструктуру с меньшим числом ошибок и меньшим энергопотреблением. Это превращает хаотичную, враждебную среду глубин в место, где цифровые «чувства» наконец видят достаточно ясно, чтобы раскрыть её скрытые сокровища.
Цитирование: Tada, S., Jeevanantham, V. Exploring oceanic depths: unveiling hidden treasures with IoT and ensembled deep hybrid learning model. Sci Rep 16, 5333 (2026). https://doi.org/10.1038/s41598-026-35634-y
Ключевые слова: обнаружение объектов под водой, датчики Интернета вещей, глубокое обучение, морские исследования, мультимодальное сенсирование