Clear Sky Science · ru
Проектирование и реализация управления 6-DoF роботизированной рукой с обнаружением объектов на основе машинного обучения с использованием мини-микроконтроллера
Умнее роботизированные руки при меньших затратах
Представьте себе заводскую роботизированную руку, которая может заметить объект, решить, как его захватить, и плавно переместить его — и все это без громоздкого компьютера или подключения к облаку. В этой статье описана именно такая система: шестосуставная (6-DoF) роботизированная рука, которая «видит» и принимает решения с помощью крошечного и недорогого микроконтроллера. Для тех, кто интересуется тем, как искусственный интеллект выходит за пределы дата-центров и внедряется в повседневные устройства, эта работа демонстрирует, как продвинутое зрение и управление могут выполняться на железе не больше флешки.
Почему важно уменьшать «мозги» роботов
Традиционные промышленные роботы часто зависят от мощных внешних компьютеров для распознавания объектов и планирования движений. Это увеличивает затраты, количество проводки и техническую сложность, что может стать барьером для малого и среднего бизнеса. Авторы поставили задачу доказать, что один недорогой микроконтроллер может выполнять почти всё: видеть объекты, определять их положение в 3D, планировать движения руки и управлять моторами, выполняющими задачу. Сохраняя обработку на борту, система становится более портативной, энергоэффективной и проще в развертывании в тесных или меняющихся условиях — от небольших фабрик до учебных лабораторий.
Гибкая рука, которую можно изготовить самому
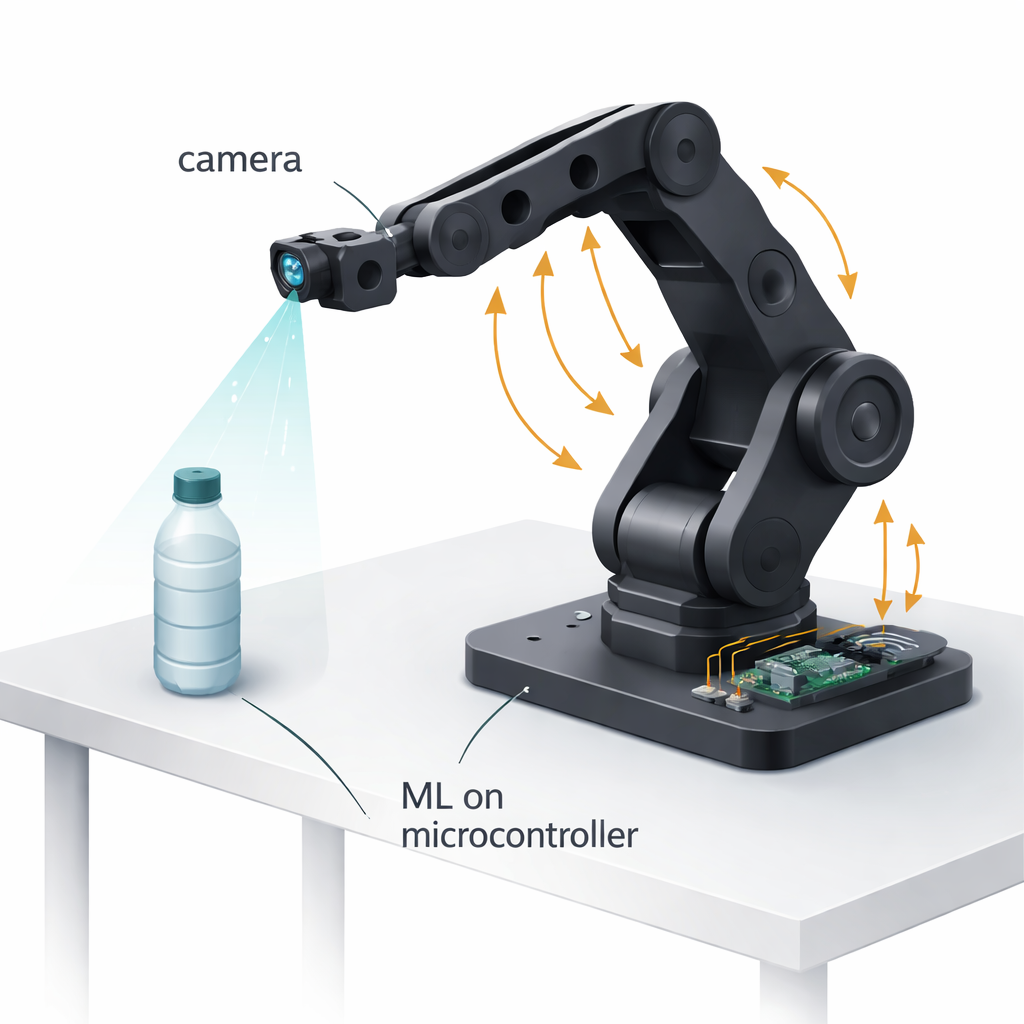
Команда разработала шестосуставную роботизированную руку с нуля, в основном из 3D-печатных пластиковых деталей, чтобы сохранить её легкой и доступной. Каждый сустав приводится в движение серво-моторами хоббийного типа с высоким моментом, которые модифицировали для обратного считывания точного угла в реальном времени, что позволило реализовать точное замкнутое управление. На кончике руки установлен самодельный двухпальцевый захват с простым датчиком тока: отслеживая потребляемый мотором захвата ток, система может оценить силу сжатия и автоматически отрегулировать захват, чтобы удерживать объекты плотно, но не раздавливая и не роняя их. На «запястье» руки закреплена небольшая камера Full HD, которая движется вместе с рукой и даёт системе вид от первого лица сцены перед захватом.
Обучение крошечного чипа видеть бутылки
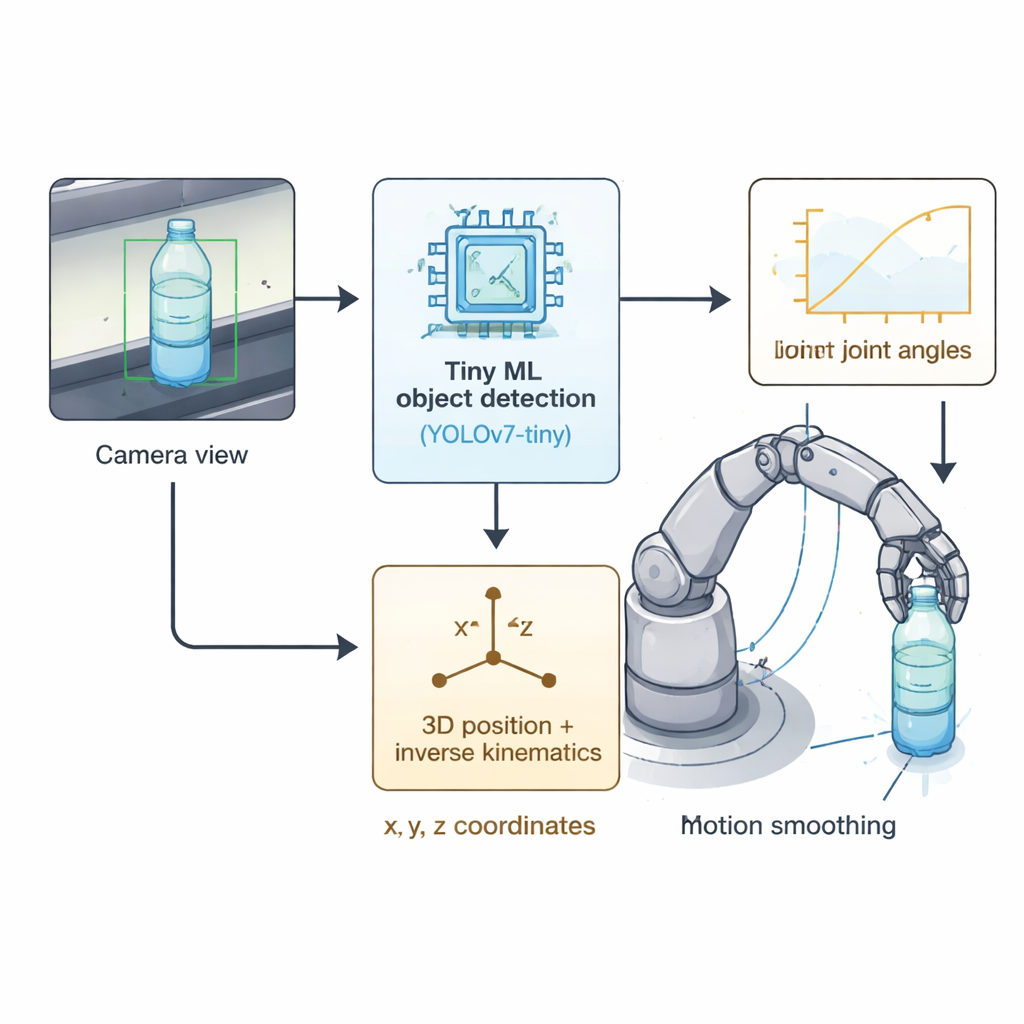
В основе визуальной подсистемы лежит компактная версия популярной сети обнаружения объектов YOLOv7-tiny. Исследователи натренировали эту модель на более чем 2 500 изображениях пластиковых бутылок воды, снятых при широком диапазоне углов освещения, расстояний и частичных закрытий. После обучения на мощной графической карте модель сжали до 8-битного формата «tiny ML», чтобы она поместилась в ограниченные память и вычислительные ресурсы микроконтроллера AMB82-Mini. Даже в таком урезанном виде модель достигла примерно 88% точности в обнаружении бутылок и работала достаточно быстро — около 7–8 кадров в секунду — для работы по принципу pick-and-place в реальном времени прямо на микроконтроллере, без помощи ПК или облака.
От пикселей к точным движениям
Как только камера обнаруживает бутылку, система вычисляет центр рамки обнаружения в изображении и оценивает расстояние до объекта по тому, насколько велик он выглядит в пикселях. Это даёт координаты x, y и z в пространстве. Затем пользовательский математический решатель переводит эти координаты в шесть углов суставов, которых должна достичь рука, используя стандартную геометрию роботов, но оптимизированную для быстрой работы на крошечном процессоре. Программное обеспечение управления, организованное как простой конечный автомат, циклически проходит стадии: обнаружение объекта, подвод к нему, закрытие захвата с использованием датчика тока в роли «чувствительного» датчика, а затем транспортировка объекта к фиксированной точке сброса. Чтобы движения были плавными и без дрожания, команда использовала аккуратно сформированные кривые «смягчения» движения и специальный метод модуляции напряжения, уменьшающий вибрацию моторов и перерегулирование.
Тесты в реальных условиях и их выводы
В повторяющихся экспериментах интегрированная система показала, что она может надёжно поднимать и размещать пластиковые бутылки массой до 300 граммов с 100% успешностью и при этом сохранять хорошую работу при нагрузках до 500 граммов. Моделирование и измерения показали, что погрешности позиционирования обычно около одного миллиметра — что достаточно для многих сортировочных и упаковочных задач. По сравнению с более простыми схемами управления, стратегия авторов по управлению моторами снизила вибрации, сократила время стабилизации руки и устранила рывки. Хотя тесты фокусировались на одном типе объекта и фиксированных расстояниях в контролируемых условиях помещения, они убедительно демонстрируют, что серьёзное восприятие и управление роботом можно уместить на одной очень скромной встроенной плате.
Что это значит для повседневной автоматизации
Для неспециалистов основной вывод таков: продвинутые способности «видеть» и «двигаться» больше не ограничены дорогими, мощными роботами. Сочетая крошечные модели машинного обучения, умную геометрию и тщательное моторное управление на недорогом микроконтроллере, эта работа показывает путь к компактным автономным рукам-манипуляторам, которые могли бы реально принять малые производители, школы и любители. По мере того как будущие версии расширятся на большее количество типов объектов и более разнообразные среды, похожие встроенные системы смогут незаметно автоматизировать бесчисленное количество простых задач pick-and-place, делая интеллектуальную робототехнику доступной для гораздо большего числа людей и мест.
Цитирование: Almaliki, H.H., Mazinan, A.H. & Modaresi, S.M. Design and implementation of a 6-DoF robot arm control with object detection based on machine learning using mini microcontroller. Sci Rep 16, 6842 (2026). https://doi.org/10.1038/s41598-026-35508-3
Ключевые слова: встроенная робототехника, tiny machine learning, управление роботизированной рукой, обнаружение объектов, промышленная автоматизация