Clear Sky Science · ru
Разработка методики генерации цифровой модели местности речного русла с использованием SfM на БПЛА и облака точек LiDAR
Почему важно картировать дно рек
Реки делают гораздо больше, чем просто переносят воду. Их русла, песчаные отмели и берега контролируют наводнения, создают местообитания для дикой природы и определяют, как загрязнения перемещаются вниз по течению. Тем не менее точное картирование речного дна и прилегающей территории оказывается удивительно сложной задачей, особенно в мелких заросших потоках, куда сложно добраться лодкам, сонорам и людям с нивелирными шестами. В этом исследовании показано, как низколетящие беспилотники, лазерные сканеры и интеллектуальные компьютерные фильтры могут работать вместе, чтобы создать подробные «обнажённые» карты рельефа корейского ручья, предлагая более безопасный, быстрый и полный взгляд на скрытую форму рек.
Новые глаза в небе над запутанным руслом
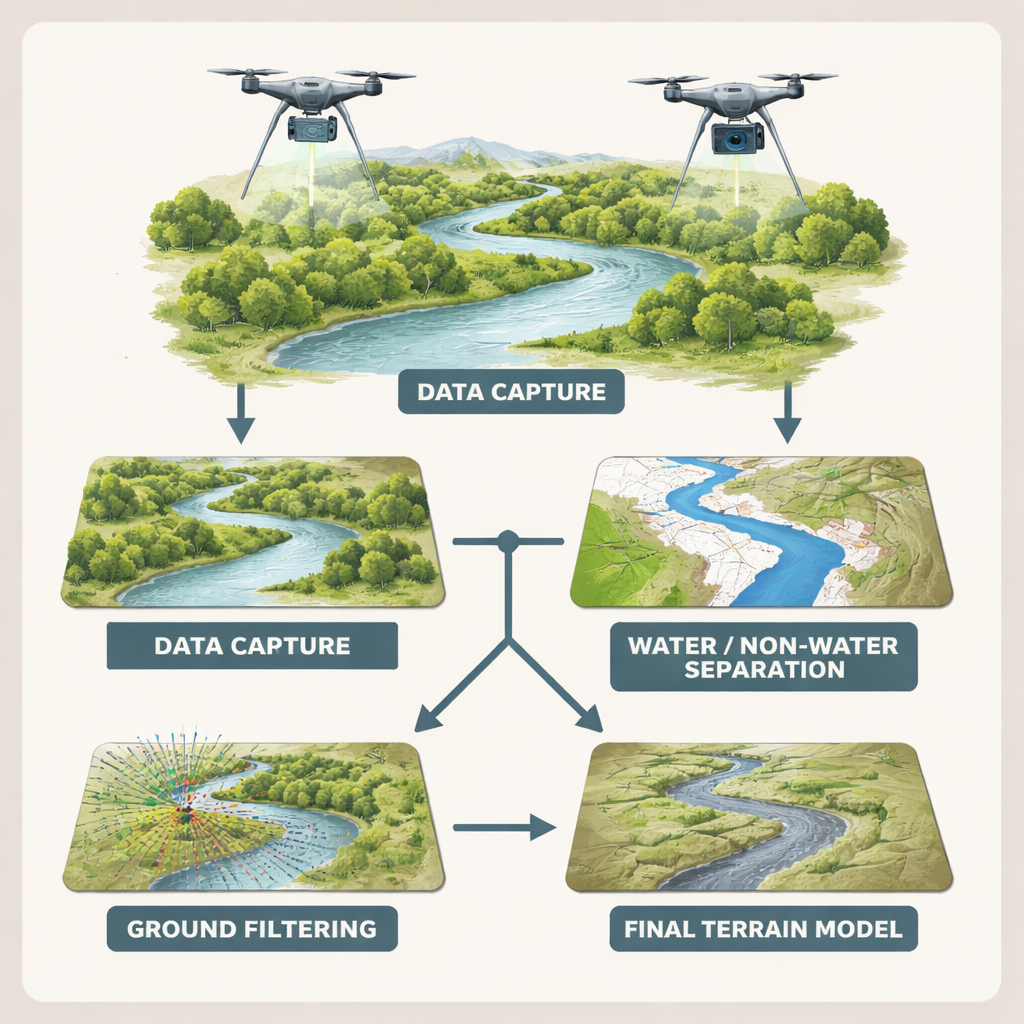
Исследователи сосредоточились на участке длиной 2,8 км ручья Бокха в Ичхоне, Южная Корея — ландшафте с извилистыми протоками, песчаными отмелями, поймами и высокими прибрежными деревьями. Традиционные съёмки там были бы медленными, опасными и неохватывающими все изгибы и впадины. Вместо этого команда использовала два типа беспилотников. Один нес лазерный сканер (LiDAR), отправляющий импульсы света и измеряющий время их обратного срабатывания, что даёт плотное облако 3D-точек, способное проникать сквозь листву до поверхности почвы. Другой выполнял съёмку мультиспектральной камерой и использовал методику structure from motion (SfM), сшивая множество перекрывающихся фотографий в другое облако 3D-точек. В совокупности эти дополняющие друг друга данные обеспечили плотное покрытие как заросших берегов, так и мелкого, в основном прозрачного русла.
Отделение воды от суши и почвы от мусора
Исходные 3D-облака точек фиксируют всё: листья, ветви, строения, шум в воздухе и отражения на рябящей воде. Чтобы смоделировать только истинный рельеф, эти лишние точки необходимо удалить. Команда сначала различала воду и сушу с помощью простого цветового индикатора — Нормализованного разностного водного индекса (NDWI), который сравнивает яркость каждого пикселя в зелёной и ближней инфракрасной частях спектра. Пикселям со значениями выше выбранного порога присваивался статус воды. В областях суши отдавали предпочтение точкам LiDAR, потому что лазерные импульсы могут просачиваться между листьями до почвы. В водных зонах, где LiDAR в основном отражается от поверхности и не «видит» глубину, исследователи опирались на данные SfM, которые иногда способны зафиксировать особенности на дне через мелкую относительно прозрачную воду.
Испытание трёх цифровых «веников»
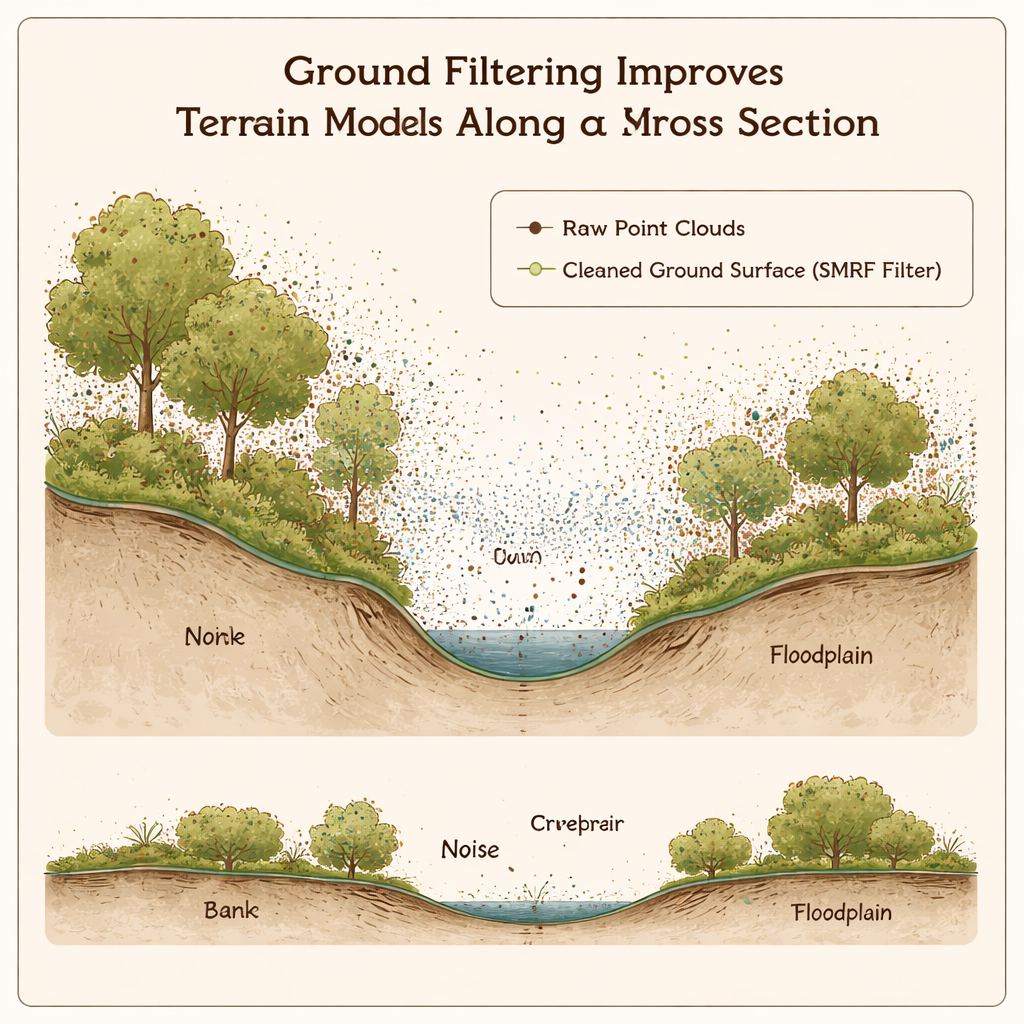
Далее последовал более сложный этап: удаление растительности и других негрунтовых объектов при сохранении реальной формы берегов и дна. Команда сравнила три широко используемых «цифровых веника», или фильтра грунта. Фильтр симуляции ткани представляет собой воображаемый гибкий лист, натянутый над инвертированным облаком точек, рассматривающий этот лист как поверхность земли. Прогрессивный TIN-фильтр постепенно строит сеточную поверхность из низких точек, добавляя новые, если они соответствуют правилам по высоте и уклону. Простой морфологический фильтр (SMRF) многократно эродирует и расширяет поверхность, срезая высокие объекты вроде кустарников и деревьев. Для каждого метода исследователи тестировали множество настроек параметров, оптимизируя для LiDAR на суше и SfM в воде, а затем сверяли полученные модели рельефа с 11 тщательно измеренными поперечными профилями, снятыми традиционными нивелирными инструментами.
Поиск наилучшего совпадения с реальной рекой
Точность оценивалась по средним и среднеквадратичным разностям между моделированными и замеренными высотами. Когда LiDAR и SfM использовались по отдельности, фотометрический метод в целом показал лучшие результаты, потому что он мог частично захватывать затопленное дно, которое LiDAR пропускал. Но наиболее ясная картина возникала при объединении двух наборов данных: LiDAR для суши и SfM для воды, оба очищенные оптимизированными фильтрами. Среди трёх алгоритмов SMRF продемонстрировал наилучшую общую производительность, с ошибками порядка всего 16–21 сантиметра по всей зоне. Он превосходно удалял плотные кустарники и высокие деревья, сохраняя при этом резкие элементы вроде небольших террас и крутых берегов, что важно для реалистичных моделей наводнений и местообитаний, хотя иногда слегка занижал высоты в водных зонах.
Что это означает для рек и их соседей
Практически, исследование предоставляет апробированный рецепт превращения «грязных» данных дронов в точные обнажённые карты рельефа малых мелководных ручьёв. Автоматически разделяя воду и сушу и умело сочетая лазерные и фотоданные, метод преодолевает многие «слепые» зоны старых съемок с лодки или с земли. Авторы называют SMRF наиболее надёжным универсальным фильтром для такого смешанного коридора реки, отмечая при этом, что фильтр симуляции ткани особенно стабилен в сложных водных участках с ошибочными точками. В совокупности эти выводы могут помочь инженерам и экологам строить лучшие модели наводнений, планировать проекты восстановления и отслеживать изменения рек во времени — при меньших рисках и затратах на полевые работы. По мере распространения более экологичных лазерных систем и усовершенствованных методов обработки, этот подход может сделать детализированное картирование речного дна стандартным инструментом управления водными ресурсами.
Цитирование: Gou, J., Lee, H., Park, J. et al. Development of a stream DTM generation methodology using UAV-based SfM and LiDAR point cloud. Sci Rep 16, 5178 (2026). https://doi.org/10.1038/s41598-026-35473-x
Ключевые слова: картирование рек, съёмка дроном, LiDAR, цифровая модель рельефа, экология ручьёв