Clear Sky Science · ru
Обнаружение состояния рабочей выработки в угольной шахте на основе YOLOv8-EST
Более умные глаза под землёй
Современные угольные шахты наполнены мощной техникой, работающей в тёмных, запылённых выработках, где видимость человека ограничена, а запасы безопасности малы. В этом исследовании представлена новая система искусственного интеллекта (ИИ) под названием YOLOv8-EST, которая помогает шахтам непрерывно «наблюдать» за рабочей выработкой — участком, где ведётся активная резка угля — и автоматически оценивать, работают ли ключевые машины нормально. Выполняя это быстро и точно на ограниченных вычислительных ресурсах на месте, система стремится повысить безопасность и эффективность без необходимости в зале с высокопроизводительными серверами.
Почему наблюдение за рабочей выработкой важно
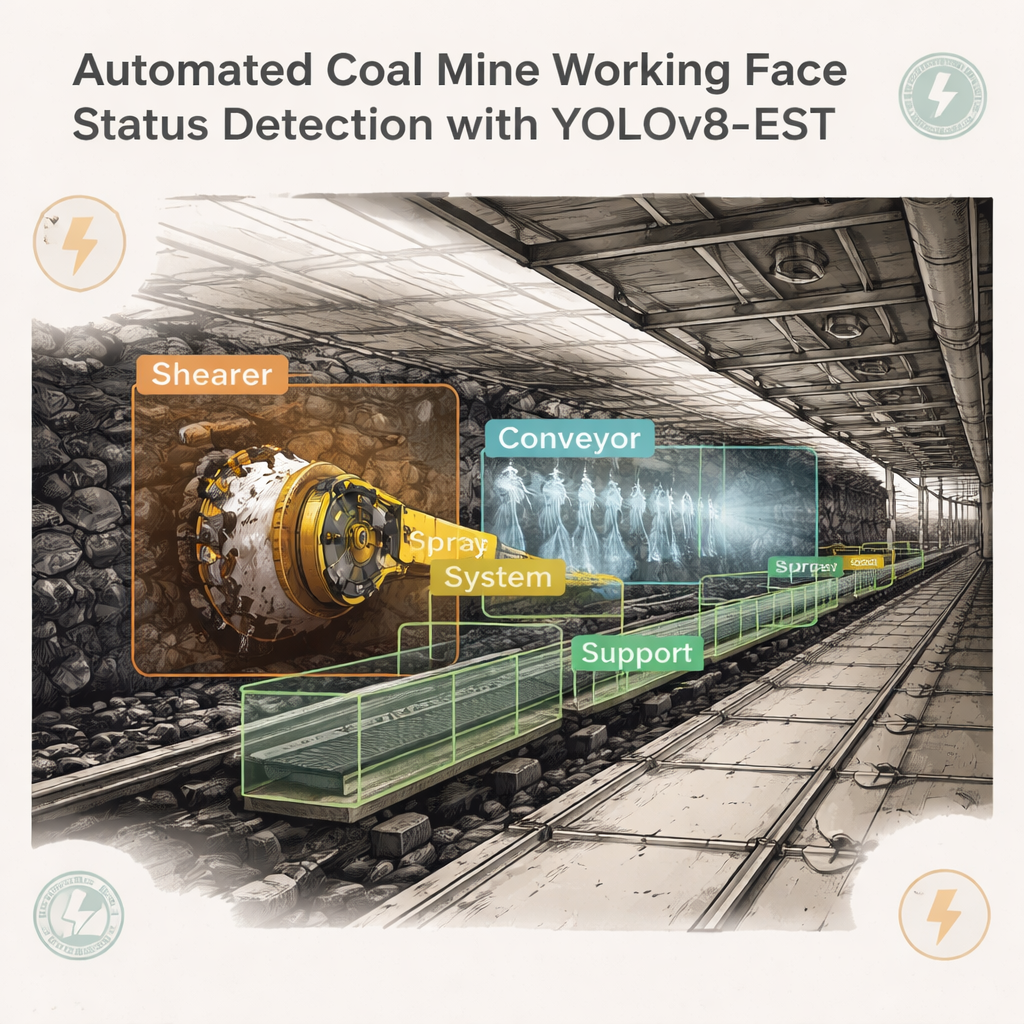
Китай — крупнейший в мире производитель угля, и его шахты испытывают давление в части повышения безопасности, чистоты и эффективности. На полностью механизированной выработке вращающийся режущий барабан срезает уголь из пласта, а скребковые и конвейерные ленты вывозят его, а системы орошения подавляют пыль. Если какой-либо из этих компонентов выходит из строя или ведёт себя аномально, производство может снижаться и возможны аварии. Традиционный мониторинг сильно зависит от опыта рабочих и простых датчиков, которые испытывают трудности в условиях низкой освещённости, летающей пыли, бликов и частых закрытий обзорности движущимся оборудованием. Авторы определяют «обнаружение состояния рабочей выработки» как идентификацию в реальном времени нормальных и аномальных состояний этих ключевых компонентов, используя только видеокадры — привлекательный путь к действительно интеллектуальным шахтам.
Ограничения существующего компьютерного зрения в шахтах
В последние годы наблюдается всплеск успехов в обнаружении объектов на базе ИИ, особенно в быстрых системах семейства YOLO (You Only Look Once). Эти модели способны за доли секунды обнаруживать и маркировать множество объектов на изображении. Однако большинство улучшений точности достигались за счёт увеличения глубины и размера сетей, что требует больше вычислительных ресурсов, чем обычно доступно на грани выработки. Альтернативные детекторы, такие как Faster R-CNN, RetinaNet, EfficientDet и системы на основе трансформеров, могут быть очень точными, но часто слишком медленны или требовательны к ресурсам для суровых и динамичных подземных условий. Кроме того, стандартные модели не адаптированы к специфическим визуальным проблемам шахт — экстремальному контрасту, закручивающейся пыли, частичным просмотрам машин и постоянно меняющимся фонам.
Лёгкий, но мощный движок обнаружения
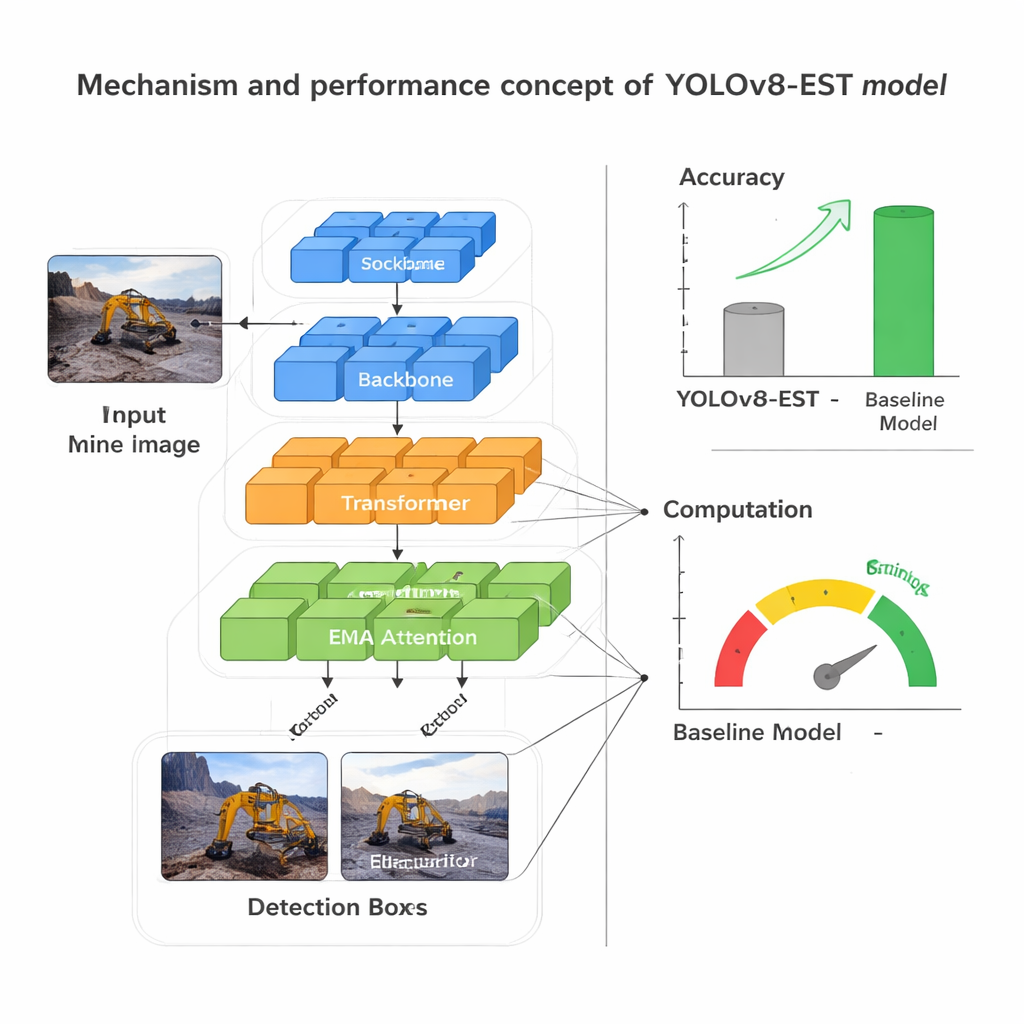
Чтобы справиться с этими ограничениями, исследователи взяли за основу YOLOv8 — современный детектор в реальном времени — и переработали его специально для угольной промышленности, создав YOLOv8-EST. Основная идея — добавить более интеллектуальные компоненты обработки признаков без разрастания модели. Во‑первых, они вставили блоки Swin Transformer — модули, использующие внимание внутри небольших окон изображения и в сдвинутых окнах — чтобы захватывать как локальные детали, так и более дальние закономерности, например форму линии конвейера или очертания корпуса комбайна. Во‑вторых, они улучшили понимание пространственных взаимосвязей, генерируя относительные позиционные кодировки с помощью небольшой глубокой сети вместо простых линейных формул, что помогает, например, понять, правильно ли выровнен поток орошения относительно режущего барабана. В‑третьих, они ввели модифицированную функцию активации GELUS, математически настроенную так, чтобы реагировать плавно, но эффективно на те виды шумных, низкоконтрастных сигналов, характерных для шахтных изображений, снижая вычисления и сохраняя стабильность обучения. Наконец, модуль внимания EMA использует стратегию экспоненциального скользящего среднего для смешивания текущей и прошлой информации о признаках, помогая сети фокусироваться на действительно важных областях и сглаживать шумные, мерцающие фоны.
Испытание системы
Команда собрала специализированный набор изображений с полностью механизированной выработки, названный набором CM, включающий 10 862 изображения. Эти сцены содержат корпус машины, режущий барабан, скребковый конвейер, ленточный конвейер и систему орошения в различных условиях освещённости и запылённости. Данные были разделены на обучающую, валидационную и тестовую подвыборки, а также сгруппированы по условиям: низкая освещённость/высокая запылённость, средние и нормальные условия для проверки устойчивости. С использованием стандартных метрик качества — precision (точность), recall (полнота) и средняя точность (mAP) — они сравнили YOLOv8-EST с лёгкими моделями вроде YOLOv3-tiny и SSD-Mobilenetv2, массовыми YOLOv5 и YOLOv8, более тяжёлыми двухэтапными детекторами, такими как Faster R-CNN и RetinaNet, и дизайнами на основе трансформеров, включая DETR и RT-DETR. Во всех тестах YOLOv8-EST показал лучшую сбалансированность: около 98% по точности и полноте и очень высокий mAP, при этом модель осталась достаточно компактной для работы в реальном времени на одной промышленной графической карте.
Что это значит для безопасности шахт
Для неспециалистов ключевой результат в том, что это исследование превращает сырое, мутное видео из-под земли в надёжные автоматические отчёты о состоянии критического горного оборудования. Вместо того чтобы просить рабочих наблюдать тусклые экраны, покрытые пылью и смазанными от движения изображениями, YOLOv8-EST может сигнализировать, когда конвейер остановился, барабан сместился не туда, где должен быть, или система орошения не работает, и делать это с почти человеческой точностью круглосуточно. Тщательно адаптируя современные методы ИИ для эффективной работы прямо на грани выработки — а не только в удалённых центрах обработки данных — система предлагает практичный путь к более безопасному, стабильному и интеллектуальному угледобывающему производству.
Цитирование: Wang, H., Wu, G., Yang, Q. et al. Working face status detection in coal mine based on YOLOv8-EST. Sci Rep 16, 7787 (2026). https://doi.org/10.1038/s41598-026-35452-2
Ключевые слова: безопасность угольной шахты, обнаружение объектов, компьютерное зрение, глубокое обучение, промышленная автоматизация