Clear Sky Science · ru
Новая адаптивная нейро‑нечеткая и адаптивная пропорционально‑резонансная схема управления для приложений электромобилей на базе ПМСП
Тише и плавнее: электрические поездки
Электромобили уже чище бензиновых, но способы управления их двигателями всё ещё оставляют пространство для улучшений. Резкие подергивания при нажатии педали, тихий гул от мотора и потери энергии — всё это связано с тем, насколько быстро и плавно двигатель может реагировать на меняющиеся дорожные и транспортные условия. В этой статье рассматривается новый внутренний способ «управления» двигателем — сочетание искусственного интеллекта и специальной обработки сигнала — чтобы электромобили ускорялись более плавно, тратили меньше энергии и лучше справлялись с реальными возмущениями.
Почему управление двигателем важно на реальной дороге
Современные электромобили часто используют двигатели с постоянными магнитами, потому что они компактны, эффективны и обеспечивают сильное тяговое усилие с места. Но городской цикл вождения сложен: водители останавливаются и трогаются на светофорах, маневрируют в пробках, встречают подъёмы и меняющиеся нагрузки. В таких условиях скорость двигателя может превысить требуемую или запаздывать, а крутящий момент может пульсировать. Эти пульсации проявляются в виде вибрации, шума и повышенной нагрузки на шестерни и подшипники. Традиционные устройства управления с фиксированной настройкой хороши лишь в узком диапазоне условий и испытывают трудности при изменении дороги, температуры или нагрузки на автомобиль.
Сочетание обучения и правил для лучшего управления скоростью
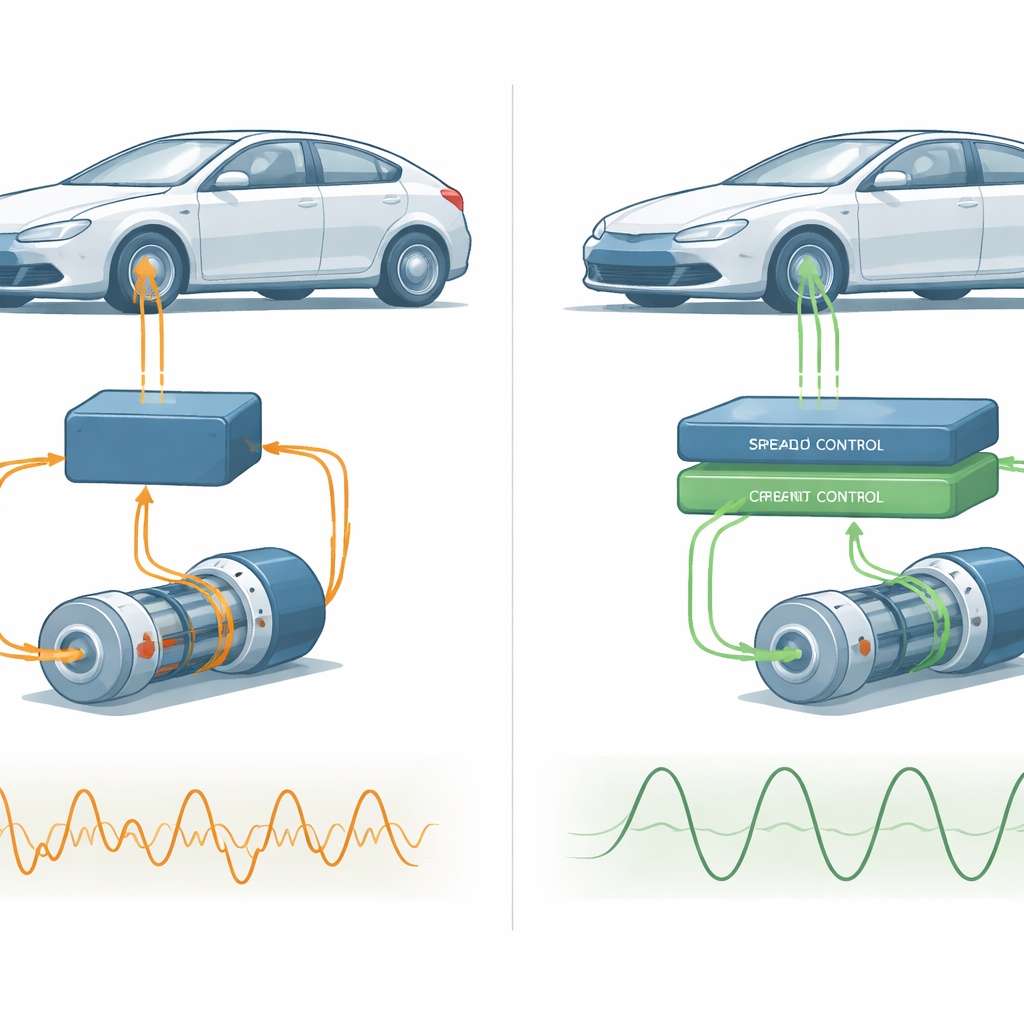
Авторы заменяют привычный внешний блок управления скоростью адаптивной нейро‑нечеткой системой — контроллером, который сочетает правила типа «если—то» нечеткой логики с обучаемостью нейронных сетей. Вместо ручной заводской настройки этот контроллер учится по примеру на том, как скорость двигателя реагирует на команды и возмущения. Он преобразует сырую ошибку скорости (насколько фактическая скорость отличается от желаемой) и скорость изменения этой ошибки в набор перекрывающихся «мнений», а затем объединяет их в точную коррекцию. Результаты обучения и тестирования показывают, что такой обученный контроллер быстро находит настройки, снижающие перерегулирование и недорегулирование, сокращающие время достижения целевой скорости и сохраняющие устойчивость поведения даже при наличии нелинейностей и изменений в системе.
Формирование тока для плавной и тихой работы
В то время как внешний контур определяет, насколько быстро должен вращаться двигатель, внутренний контур решает, какой ток в каждый момент подаётся на обмотки. Здесь авторы вводят адаптивный пропорционально‑резонансный контроллер. Вместо того чтобы реагировать только на величину ошибки, этот контроллер настроен уделять особое внимание токам на основной переменной частоте двигателя, где нежелательные пульсации наиболее вредны. Тщательно подобрав несколько ключевых настроечных значений, он обеспечивает очень мощную коррекцию на этой фундаментальной частоте, избегая при этом неустойчивости в других диапазонах. В результате токи почти повторяют идеальную синусоиду, с гораздо меньшим числом резких искажений, которые иначе проявлялись бы как пульсации момента и слышимый шум.
Испытание новой стратегии
Команда оценивает свою двухступенчатую конструкцию — нейро‑нечеткое управление скоростью во внешнем контуре и резонансное управление током во внутреннем — посредством детальных компьютерных моделирований и экспериментов с аппаратным в‑петле моделированием, имитирующим реальный силовой тракт электромобиля. Они сравнивают её с тремя устоявшимися методами: обычным пропорционально‑интегральным контроллером, схемой, сочетающей этот контроллер с резонансным внутренним контуром, и модельно‑предиктивным подходом. В различных сценариях — старт с места, равномерная работа под нагрузкой, быстрое изменение скорости при постоянной нагрузке и внезапные изменения нагрузки при постоянной скорости — новая схема последовательно достигает целевой скорости быстрее, с меньшими пиками и провалами. Она также обеспечивает более плавный крутящий момент и чище формы тока, даже когда сопротивление и индуктивность двигателя искусственно изменяют для имитации нагрева или суровых условий.
Что это означает для будущих электромобилей
Проще говоря, эта гибридная стратегия управления позволяет электрическому двигателю «думать» и адаптироваться, а не беспрекословно следовать фиксированному рецепту. Обучаясь отвергать возмущения на уровне скорости и формируя волновые формы тока внутри двигателя, подход снижает вибрацию, шум и потери энергии. Для водителей это означает более плавное ускорение, более стабильный круиз и трансмиссии, которые лучше переносят износ компонентов и изменение погодных условий. Хотя метод в некоторых частях всё ещё предполагает фиксированную рабочую частоту, результаты указывают на то, что добавление интеллекта и управления с учётом частотности в приводах двигателей может стать важным шагом к более изящным, долговечным и энергоэффективным электромобилям.
Цитирование: Sangeetha, E., Ramachandran, V.P. A novel adaptive neuro-fuzzy and adaptive proportional resonant control scheme for PMSM based electric vehicle applications. Sci Rep 16, 8023 (2026). https://doi.org/10.1038/s41598-026-35363-2
Ключевые слова: двигатели электромобилей, нейро‑нечеткое управление, синхронный двигатель с постоянными магнитами, снижение пульсаций момента, современные приводы двигателей