Clear Sky Science · ru
Фаззовый скользящий режим на основе алгоритма супер‑скручивания для дескрипторных T‑S нечетких систем
Принуждение сложных систем к желаемому поведению
От управления популяциями рыб до поддержания устойчивости энергосетей и электронных схем — многие реальные системы ведут себя сложно и нелинейно. Инженеры применяют продвинутые алгоритмы управления, чтобы сохранять такие системы безопасными и эффективными, даже при возмущениях и неопределенностях. В этой статье предлагается новая стратегия управления, которая более плавно укрощает эти непокорные системы, избегая резких переключений, способных повредить оборудование и ухудшить характеристики.
Почему некоторые системы сложно контролировать
Многие практические системы описываются не только уравнениями, определяющими изменение величин во времени, но и алгебраическими ограничениями, которые должны выполняться в каждый момент. Такие дескрипторные системы встречаются в экономике, энергосетях, механических кинематических цепях и биологических моделях. Для учёта их нелинейного поведения исследователи часто используют нечеткие модели Такеги–Суно (T‑S), которые представляют сложную систему как смесь более простых линейных режимов, действительных в разных областях работы. Хотя этот подход мощный, он давно сталкивается с одной технической проблемой: большинство методов управления предполагали заранее известные пределы изменения нечетких «функций принадлежности», хотя эти изменения зависят от неизвестного будущего поведения системы и её регулятора.
Более плавный вид робастного управления
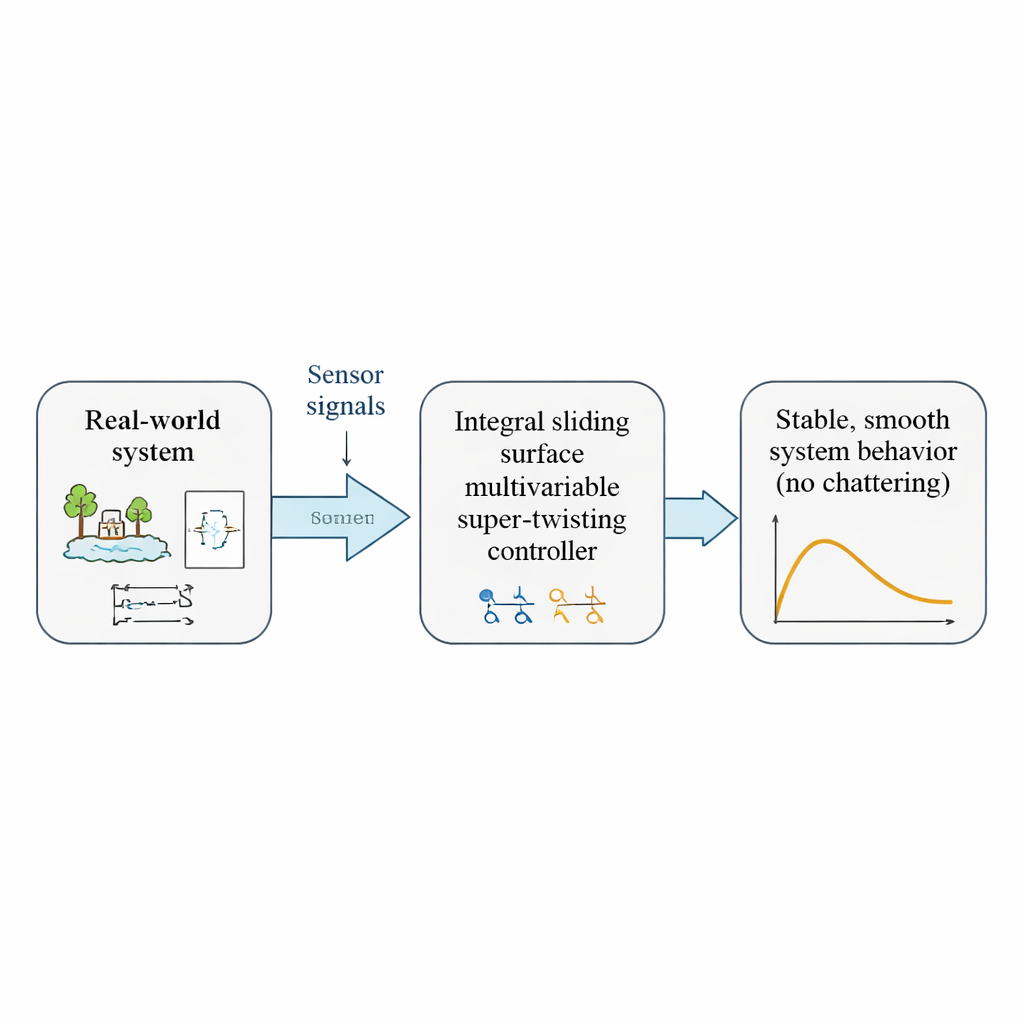
Скользящее управление — популярный метод робастного управления, известный способностью быстро принудить систему к заданной траектории и удерживать её там несмотря на возмущения. Оно достигается за счёт переключения управляющего сигнала таким образом, чтобы противодействовать неопределённостям. Однако быстрое переключение может вызывать «дрожание» (chattering) — высокочастотные колебания, нежелательные или даже вредные для механических и электрических систем. Алгоритм супер‑скручивания, более продвинутая форма скользящего режима, скрывает переключение внутри внутреннего процесса, формируя непрерывный управляющий сигнал, который сохраняет робастность и одновременно снижает дрожание. До сих пор эта техника в основном применялась к системам с одним входом или требовала разложения систем с несколькими входами на множество отдельных регуляторов, что обременительно с вычислительной точки зрения.
Новая скользящая поверхность без скрытых допущений
Первый ключевой вклад авторов — новая «интегральная» скользящая поверхность, разработанная специально для дескрипторных T‑S нечетких систем. Проще говоря, эта поверхность — математическое условие, включающее как текущее, так и накопленное прошлое поведение системы. Благодаря умному построению авторы показывают, что можно гарантировать требуемое поведение, как только система окажется на этой поверхности, без необходимости заранее задавать границы изменения функций принадлежности. Это устраняет ограничивающее допущение, сдерживавшее предыдущие методы. В анализе используются тщательно подобранные энергетоподобные функции для доказательства устойчивости поведения системы на скользящей поверхности с течением времени.
Многопеременный контроллер супер‑скручивания
Опираясь на эту скользящую поверхность, статья развивает многопеременную версию алгоритма супер‑скручивания. Вместо разработки отдельного регулятора для каждого входа или каждой скользящей переменной, метод рассматривает их совместно в матричной форме. Это делает его более пригодным для систем с сильносвязанными состояниями, таких как взаимодействующие виды в экосистеме или токи и напряжения в цепи. Авторы выводят условия выбора коэффициентов регулятора так, чтобы состояния системы немедленно достигали скользящей поверхности, а затем сходились за конечное время. Поскольку управляющий сигнал является непрерывным, а не резким переключением, дрожание подавлено по конструктивным причинам, при этом сохраняется робастность к возмущениям.
Подтверждение идеи в биологии и электронике
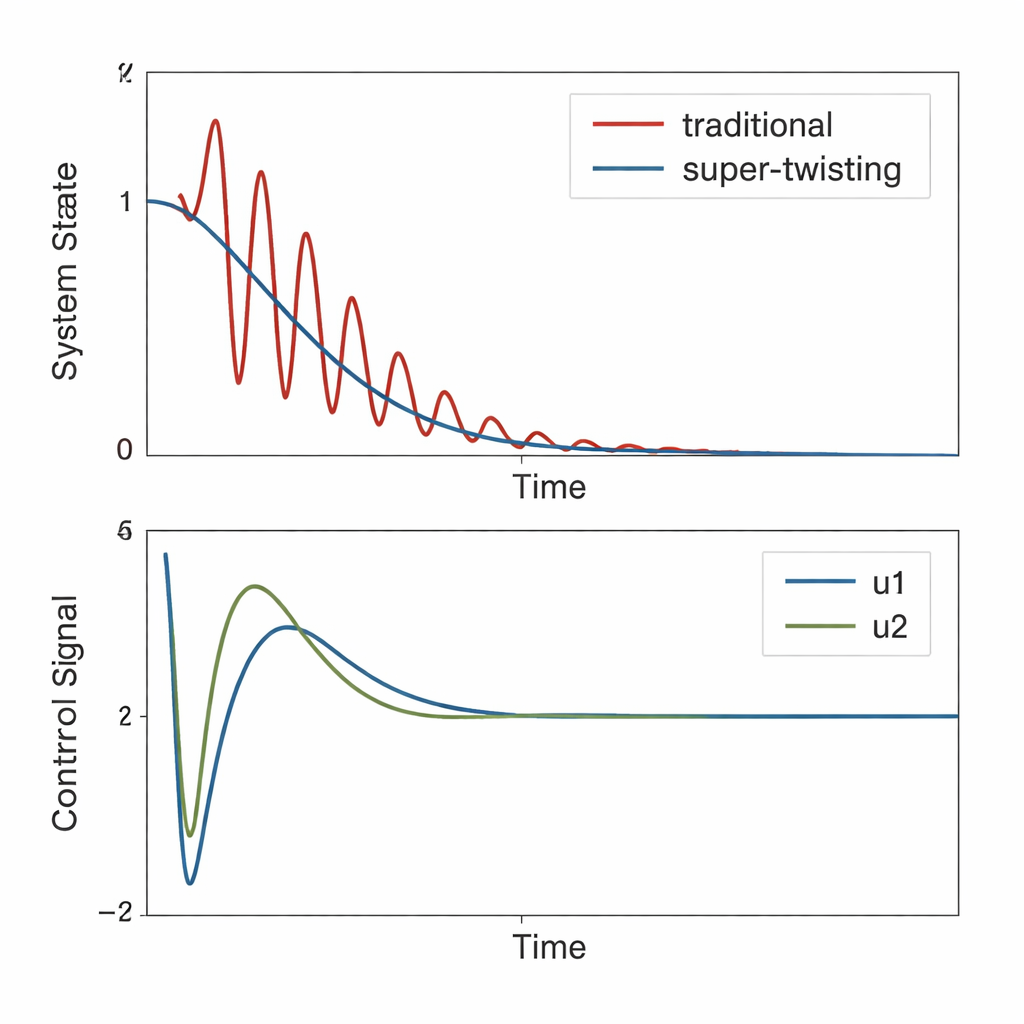
Чтобы продемонстрировать практичность метода, авторы применяют его к двум различным нелинейным дескрипторным системам. Первая модель описывает био‑экономический сценарий с незрелыми и зрелыми популяциями вида, а также переменной, отражающей репродуктивную способность и управленческие действия вроде вылова и регулирования. Второй пример — нелинейная схема с туннельным диодом, классический стенд для тестирования в электронике. В обоих случаях моделирование показывает, что предлагаемый регулятор быстро стабилизирует состояния системы и удерживает скользящие переменные около нуля, что указывает на точное слежение за требуемым поведением. По сравнению с традиционными контроллерами скользящего режима новый подход заметно снижает колебания как в ответе системы, так и в управляющих сигналах.
Что это значит на практике
Для неспециалистов главный вывод таков: эта работа предлагает способ держать сложные, ограниченные и неопределённые системы под управлением без тех резких переключений, которые доставляли проблемы в некоторых робастных методах. Объединив нечеткое моделирование, интегральную скользящую поверхность и многопеременный алгоритм супер‑скручивания, авторы проектируют регуляторы, которые как математически гарантируют устойчивость, так и практично работают более плавно. Это может быть полезно в приложениях от управления экологическими ресурсами до продвинутой силовой электроники и сетевых систем управления, особенно по мере того как дальнейшие исследования расширят эти идеи на кибер‑безопасные сценарии, где связь может быть нарушена атаками.
Цитирование: Li, X., Zhang, W. & Yuan, C. Super-twisting algorithm-based fuzzy sliding mode control for descriptor T-S fuzzy systems. Sci Rep 16, 6981 (2026). https://doi.org/10.1038/s41598-026-35344-5
Ключевые слова: скользящее управление, нечеткие системы, робастное управление, нелинейная динамика, алгоритм супер‑скручивания