Clear Sky Science · ru
Робастный адаптивный регулятор по эталонной модели для планарного манипулятора с 3 степенями свободы
Умнее роботизированные руки для более тяжёлой работы
Заводские роботизированные руки невероятно быстры и точны, но их работа ухудшается, когда реальный мир «ведёт себя плохо»: меняются нагрузки, детали ставят немного иначе или неожиданные силы толкают манипулятор. В этой статье рассматривается новый подход, который позволяет обеспечивать точность и устойчивость распространённого трёхсуставного робота даже при неточном моделировании и при сильных возмущениях, делая роботов более надёжными партнёрами на производстве.
Почему три сустава важны на практике
Исследование сосредоточено на планарном роботе с тремя звеньями: три жёстких сегмента, соединённых вращательными суставами и движущихся в плоскости. Несмотря на простоту, такая конфигурация лежит в основе многих промышленных задач по взятию и размещению деталей, линий упаковки и сборочных систем. Сложность в том, что движение одного сустава сильно влияет на остальные, а уравнения, описывающие движение манипулятора, являются сильно нелинейными и тесно связанными. Традиционные регуляторы хорошо работают, когда всё известно и предсказуемо, но испытывают трудности при изменении полезной нагрузки, при неточном учёте трения или массы либо при внешних возмущениях, сбивающих руку с курса.
Разбиение сложного движения на более простые части
Чтобы справиться с этой сложностью, авторы сначала выводят подробную математическую модель движения робота, включая влияние масс звеньев, углов суставов и гравитации. Затем вводится ключевое упрощение: стратегия «развязывания» (decoupling). Вместо рассмотрения робота как одного запутанного трёхсуставного целого, каждый сустав моделируется так, будто его ускорение в основном зависит от собственного крутящего момента двигателя и скорости. Остальные эффекты — взаимодействия между суставами, члены гравитации и другие трудно моделируемые влияния — собираются в одну группу и рассматриваются как неопределённости. Такое развязывание позволяет разбить задачу управления на три более мелких и управляемых подсистемы по одному на сустав, при этом признаётся, что реальная система остаётся сложной. 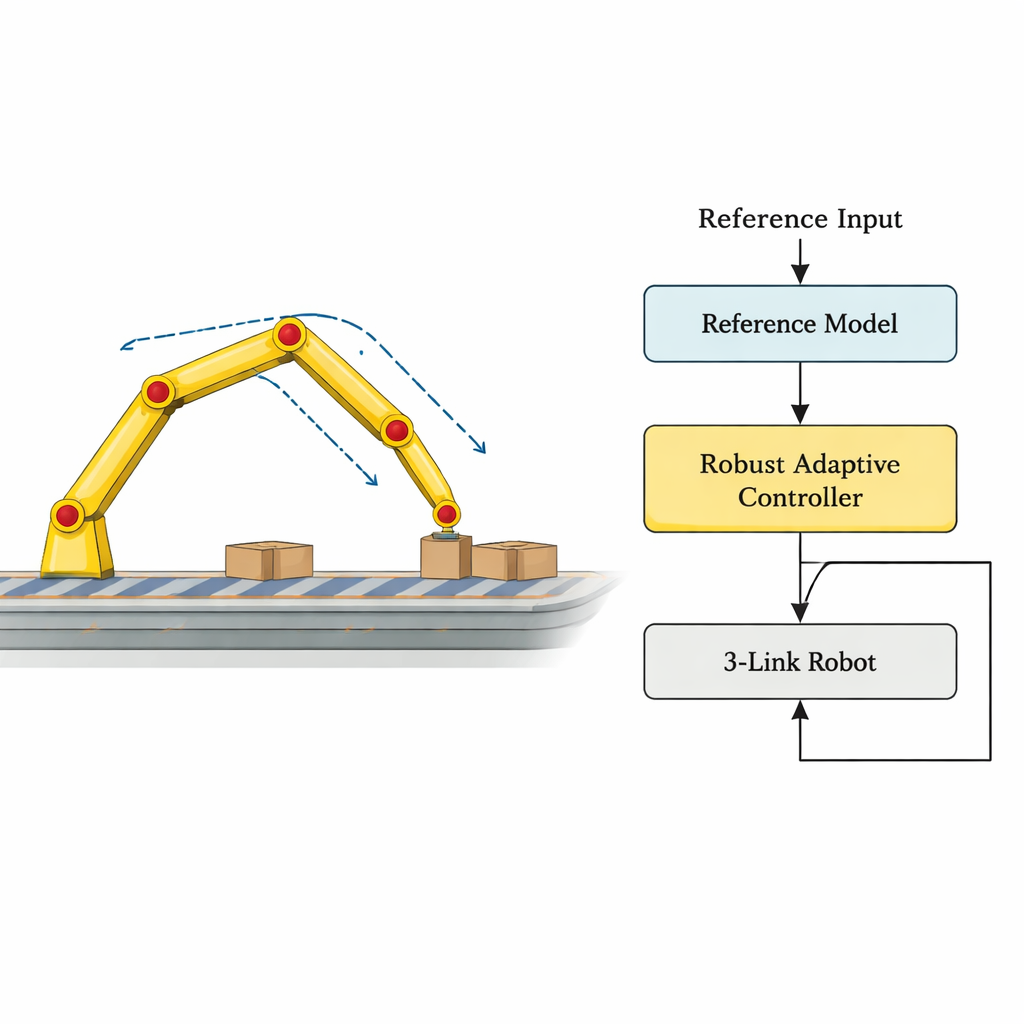
Обучение робота следовать за движущейся целью
На основе этого упрощённого описания авторы строят адаптивный регулятор по эталонной модели (MRAC). Проще говоря, сначала задаётся идеальная реакция — эталонная модель, описывающая, как каждый сустав должен двигаться с течением времени при данном команде. Контроллер постоянно сравнивает фактическое движение робота с этой моделью и в реальном времени корректирует коэффициенты адаптации, чтобы уменьшить расхождение. При идеальных условиях обычный MRAC может заставить робота близко следовать эталону, но у него есть существенный недостаток: при стойких возмущениях или ошибках моделирования адаптивные коэффициенты могут дрейфовать к крайним значениям, вызывая колебания, лишние траты энергии и даже потерю устойчивости. Это явление, называемое дрейфом параметров, делает простой MRAC рискованным для промышленного применения.
Делаем адаптацию робастной, а не беспорядочной
Чтобы избежать такого дрейфа, в статье разработаны несколько «робастных» вариантов MRAC, которые явно учитывают неизвестные воздействия. Авторы добавляют дополнительные члены в законы адаптации, которые аккуратно тянут коэффициенты контроллера обратно к безопасным границам или масштабируют усилия адаптации в зависимости от величины ошибки слежения. Среди протестированных стратегий — сигма-модификация, модификация по ошибке и модификация с учётом энергии/оптимальности — последнее решение выделяется. В обширных компьютерных симуляциях, включая быстрые осциллирующие траектории, движения захват‑перенос, изменения массы на 50 процентов, внезапное добавление полезной нагрузки и сильные высокочастотные возмущения, робастный MRAC поддерживает малую ошибку слежения и плавные управляющие сигналы. В сценариях, где у обычного MRAC внутренние коэффициенты растут бесконтрольно, робастные версии удерживают их в пределах и обеспечивают устойчивое движение руки. 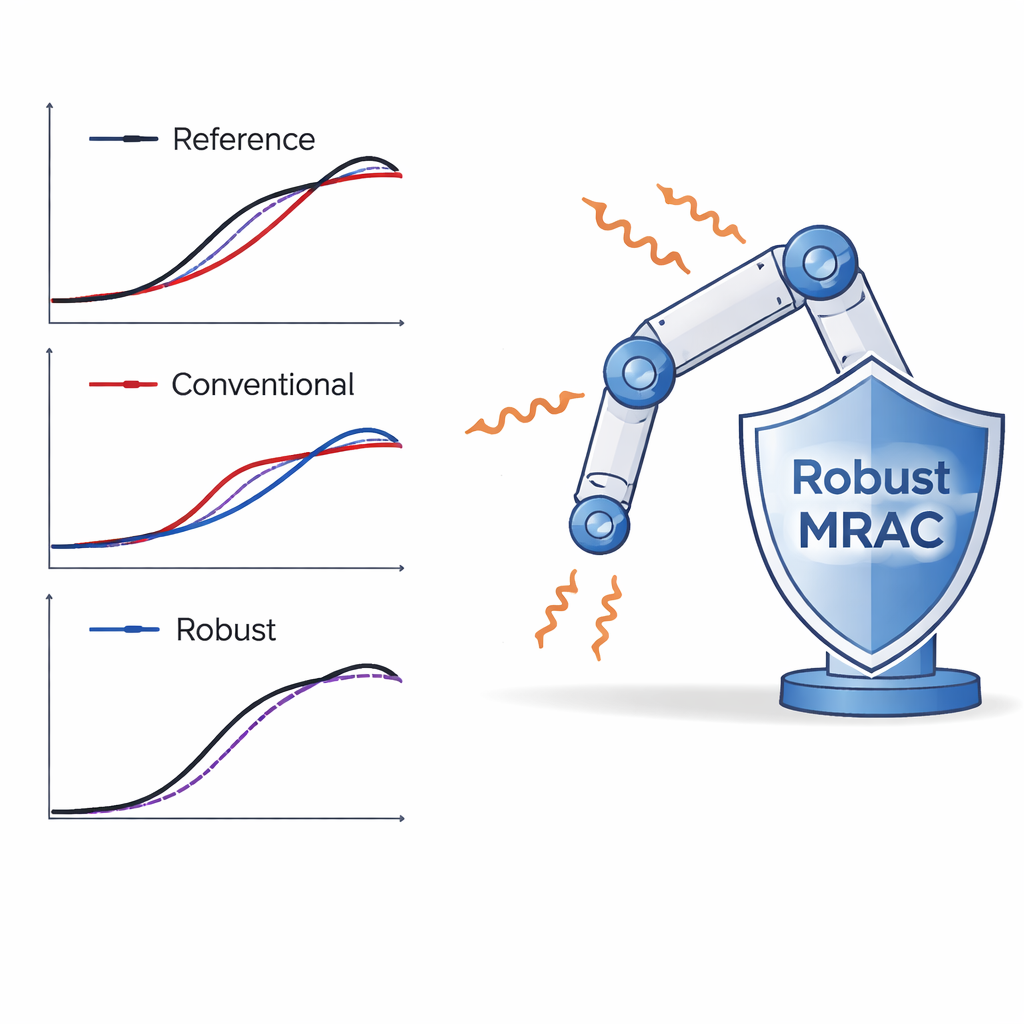
Что это значит для реальных роботов
Для непрофессионального читателя вывод простой: эта работа предлагает более умный «автопилот» для промышленных робот-манипуляторов — который продолжает учиться и адаптироваться, но не становится неустойчивым при изменениях среды или полезной нагрузки. Разбивая сложную трёхсуставную динамику на более простые части и добавляя защитные механизмы в процесс обучения, предложенный робастный адаптивный регулятор позволяет роботу точно следовать требуемым траекториям, при этом экономно используя усилия привода, даже в условиях возмущений и неопределённости. Это приближает практическую робототехнику к действительно «включи-и-работай» системам, которые можно быстро переназначать, которые справляются с неожиданными условиями и безопасно функционируют рядом с людьми без постоянного перенастроения экспертами.
Цитирование: Mohammed, T.K., Abdissa, C.M. Robust model reference adaptive controller for 3-DOF planar manipulator. Sci Rep 16, 4889 (2026). https://doi.org/10.1038/s41598-026-35309-8
Ключевые слова: управление робот-манипулятором, адаптивное управление, индустриальная робототехника, слежение траектории, робастное управление