Clear Sky Science · ru
Интеллектуальный био-вдохновленный многоцелевой и масштабируемый алгоритм кластеризации с поддержкой БПЛА в летающих ad hoc сетях
Более умные рои дронов в небе
Представьте флоты дронов, работающих сообща при поиске выживших после землетрясения, мониторинге лесных пожаров или наблюдении за посевами. Для эффективной работы сотни летающих роботов должны быстро обмениваться данными, не расходуя при этом батареи. В этой статье рассматривается, как организовать такие «рои дронов», чтобы они оставались на связи, быстро реагировали и дольше находились в воздухе, заимствуя идеи у неожиданного источника — охотничьего поведения секретаревой птицы.
Почему летающие сети сложно укротить
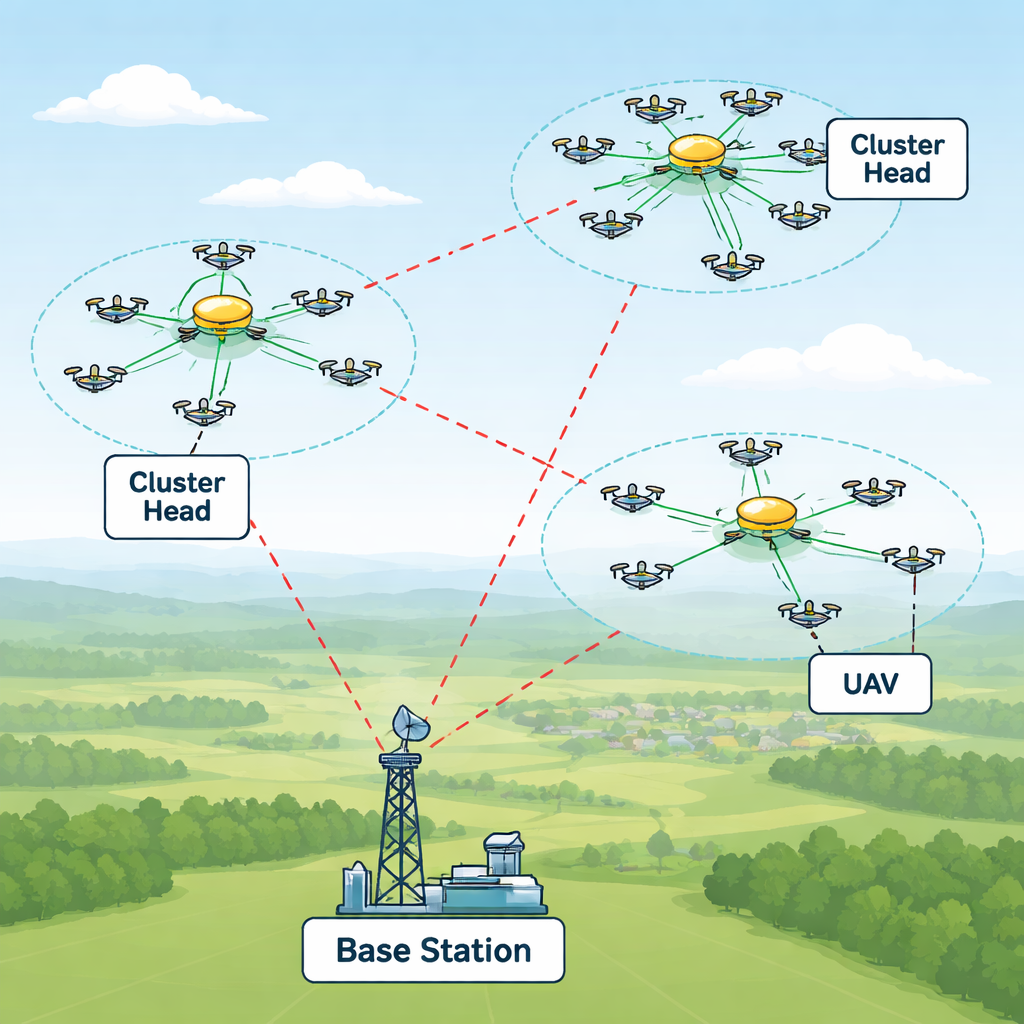
Современные дроны могут формировать то, что инженеры называют летающими ad hoc сетями, или FANET — беспроводные сети, существующие только в небе. В отличие от наземных сетей, эти дроны двигаются в трех измерениях, быстро меняют направление и зависят от ограниченного заряда батареи. Если бы каждый дрон пытался связываться напрямую со всеми остальными, сигналы сталкивались бы, задержки росли, а батареи быстро разряжались. Популярное решение — формирование кластеров: небольших групп дронов с «головой кластера», которая координирует локальные сообщения и связывается с другими головами. Но выбор того, какие дроны должны стать лидерами, и момент перераспределения ролей по мере движения роя — постоянно меняющаяся задача.
Заимствование приемов у хищной птицы
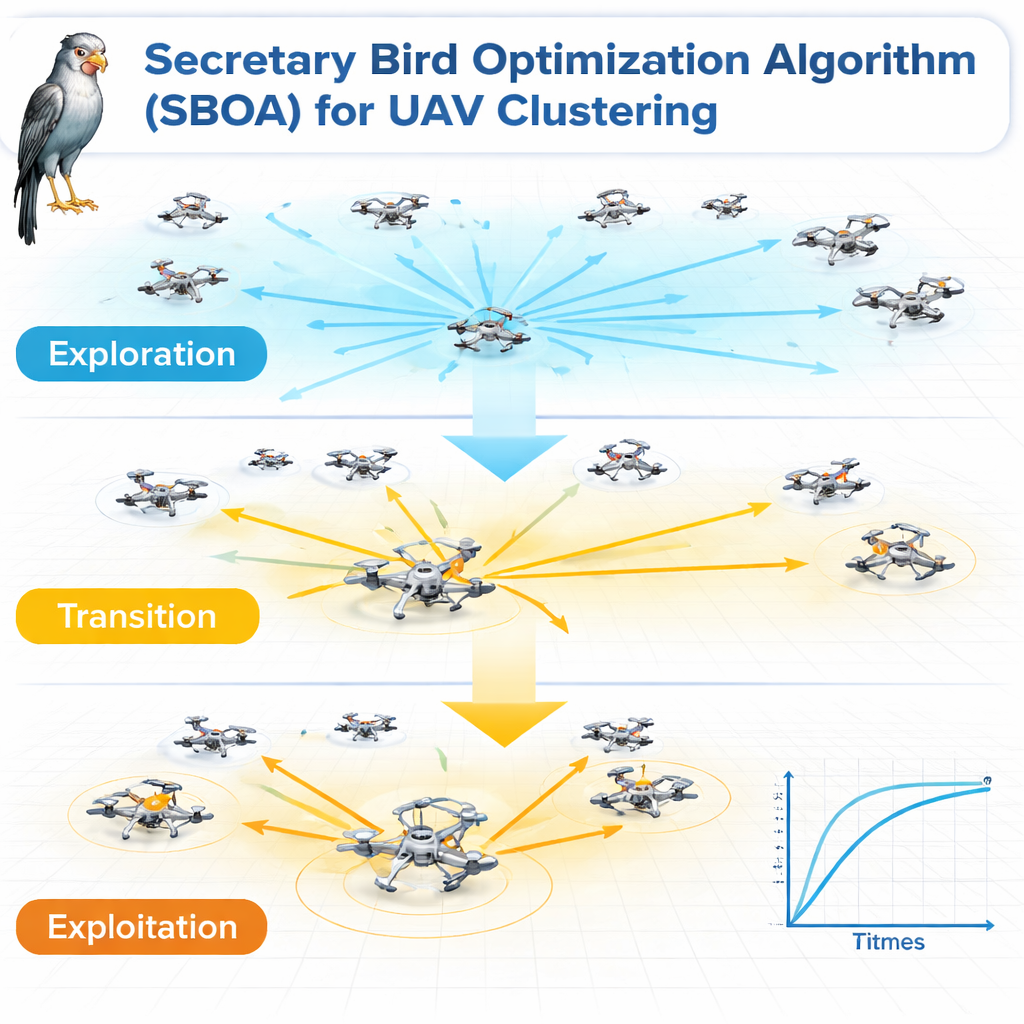
Авторы обращаются к био-вдохновленной идее, называемой Алгоритмом оптимизации секретаревой птицы (Secretary Bird Optimization Algorithm, SBOA). Секретаревые птицы известны тем, что обшаривают большие территории, а затем сходят на жертву и наносят точные удары лапами. SBOA копирует этот шаблон в программной форме. Он начинает с изучения многих возможных вариантов назначения голов кластеров по всему рою дронов, затем постепенно фокусируется на наиболее перспективных решениях. На каждом этапе алгоритм задает три вопроса: находятся ли дроны внутри каждого кластера достаточно близко друг к другу? Осталось ли у выбранных лидеров достаточно заряда? И равномерно ли распределена нагрузка, чтобы один лидер не был перегружен, пока другие простаивают? Рассматривая задачу как многоцелевую, алгоритм одновременно балансирует расстояние, энергию и справедливость.
Тестирование роев дронов в виртуальных мирах
Чтобы проверить, помогает ли эта птицеобразная стратегия, команда создала детализированные компьютерные симуляции. Они запускали от 30 до 160 дронов в трехмерные виртуальные пространства разного размера — от одного квадратного километра до большого бокса 15×15 км — и давали им летать по простому моделям движения. Радиус связи варьировался от 100 до 900 метров. В каждом сценарии SBOA соревновался с тремя современными альтернативами, также вдохновленными природой: Fire Hawk Optimization (FHOA), Portia Spider Optimization (PSOA) и многоцелевым методом, основанным на оплодотворении сперматозоидом (MOSFP). Исследователи отслеживали, сколько образовалось кластеров, как быстро возникала устойчивая структура, насколько равномерно распределялись лидерские обязанности и какую «пригодность» (fitness) давали решения, объединяя расстояние, расход энергии и баланс в единый показатель.
Что показали симуляции
Во всех почти всех тестах SBOA оказался впереди. Он регулярно обеспечивал до 15% лучшую пригодность по сравнению с конкурентами, примерно на 10% более эффективную кластеризацию и примерно на 40% лучшее распределение нагрузки среди лидеров. В экспериментах по времени подход секретаревой птицы достигал устойчивой структуры кластеров за меньшее число кадров симуляции, особенно по мере увеличения числа дронов. Даже в разреженных, больших 3D-пространствах, где дроны находятся далеко друг от друга, SBOA сохранял более 85% от наилучшей достижимой пригодности, что указывает на его способность адаптироваться как к плотным роевым формированиям, так и к расредоточенным. Визуальные инструменты — такие как поверхностные графики, карты t-SNE и виолончельные диаграммы — подтвердили, что SBOA формирует более плотные, более отчётливые кластеры с меньшим разбросом нагрузки между лидерами по сравнению с другими методами.
От симуляции к реальным миссиям
Авторы делают вывод, что стратегия, вдохновлённая поведением секретаревой птицы, представляет собой сильный рецепт управления роем дронов: она удерживает дроны в эффективных группах, справедливо распределяет работу между лидерами и плавно реагирует на изменение условий. Для непрофессионального читателя это означает, что будущие флоты спасательных, сельскохозяйственных или наблюдательных дронов смогут дольше оставаться на связи, тратить меньше батареи и работать надёжнее, просто лучше саморганизуясь. Авторы отмечают, что реальные факторы — такие как порывы ветра, ошибки GPS и радиопомехи — всё ещё требуют испытаний, и предлагают далее добавить предсказание движения на основе обучения и более умную маршрутизацию. Но как шаг к надежным воздушным сетям SBOA показывает, что наблюдение за тем, как природа охотится на саванне, может помочь сделать наших роботизированных помощников гораздо эффективнее в небе.
Цитирование: Aslam, Z., Rahman, T., Husnain, G. et al. An intelligent bio-inspired multi-objective and scalable UAV-assisted clustering algorithm in flying ad hoc networks. Sci Rep 16, 4870 (2026). https://doi.org/10.1038/s41598-026-35196-z
Ключевые слова: рой дронов, беспроводная связь, био-вдохновленные алгоритмы, энергосберегающие сети, летающие ad hoc сети