Clear Sky Science · ru
Метаррамка обучения для генерации и восстановления индивидуальных циклов шага при малом объёме данных
Почему то, как мы ходим, важно
Каждый наш шаг раскрывает больше, чем может показаться. Манера ходьбы — походка — может выдавать личность, состояние здоровья, настроение и даже уровень усталости. Однако захват этих тонких паттернов обычно требует больших объёмов данных и долгих лабораторных сессий. В этой статье представлена MetaGait — новый метод на базе ИИ, который умеет усваивать уникальный стиль ходьбы человека всего по нескольким примерам, что делает персонализированный анализ движения и помощь более практичными в клиниках, робототехнике и виртуальной реальности.
От средней походки к индивидуальным шагам
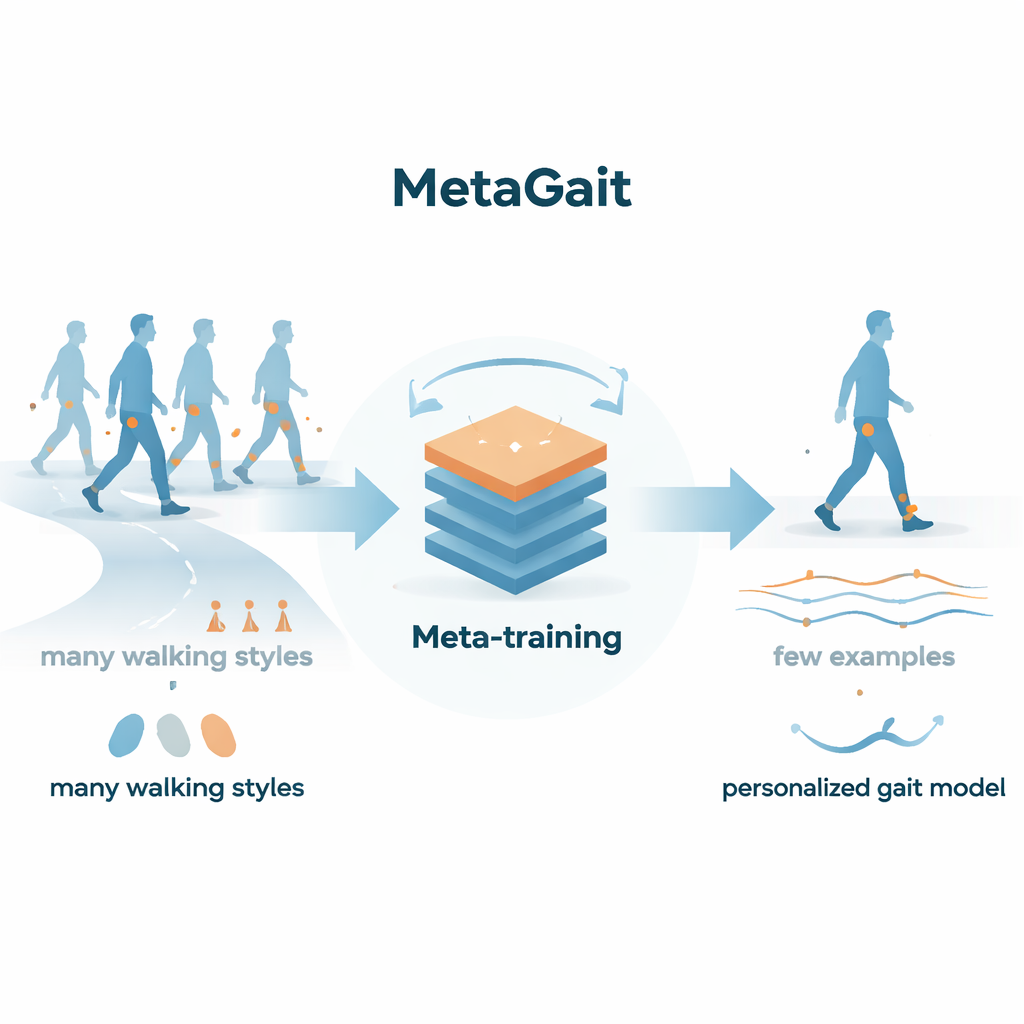
Традиционные вычислительные модели ходьбы хорошо изучают «средний» способ передвижения людей, но с трудом справляются с индивидуальными особенностями, делающими каждого из нас уникальным. Ранние системы обычно требовали больших наборов данных от каждого человека, чтобы подстроиться под его стиль, что было дорого и отнимало много времени. MetaGait решает эту задачу, рассматривая персонализацию как саму проблему обучения: вместо того чтобы только изучать, как люди ходят, система учится быстро осваивать походку нового человека, используя очень мало записанных шагов.
Учиться учиться на множестве испытуемых
Для этого исследователи применяют стратегию, называемую метаобучением — «обучение учиться». Они используют Human Gait Database, в которой собраны тысячи циклов ходьбы, снятых малыми датчиками движения, прикреплёнными к ногам более чем 200 человек, ходивших в разных условиях. MetaGait многократно тренируется на мини-задачах типа «адаптироваться к субъекту A» или «восстановить походку субъекта B из зашумлённых данных». Для каждой мини-задачи система получает крошечный набор поддержки — несколько записанных циклов походки — чтобы подстроить внутренние параметры, а затем тестируется на новых циклах того же человека. За многие такие задачи MetaGait находит внутреннюю отправную точку, которую можно быстро настроить под нового индивида всего за один-пять примеров.
Интеллектуальный движок для временных последовательностей движения
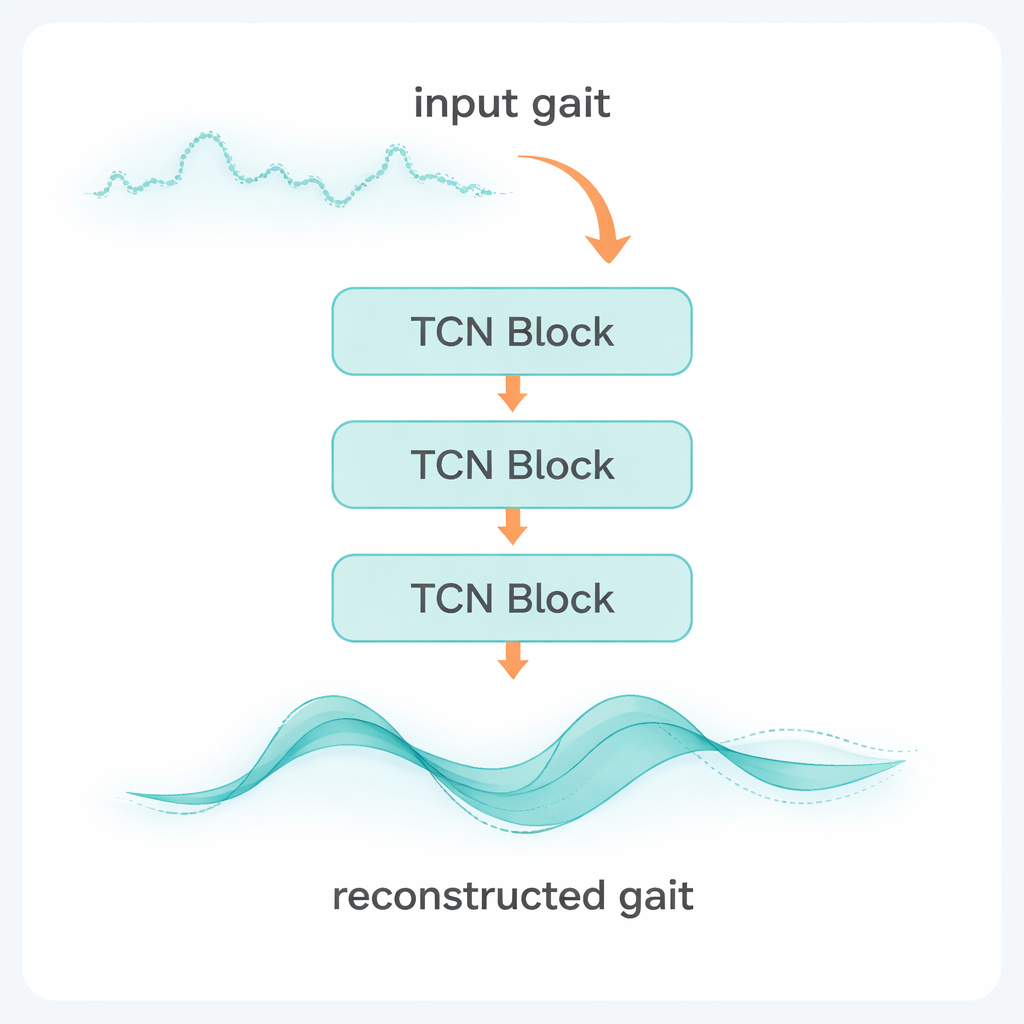
В основе MetaGait лежит временная сверточная сеть — тип нейронной сети, спроектированный для работы с последовательностями, разворачивающимися во времени. Сеть обрабатывает показания датчиков — такие как ускорения и вращения с устройств, закреплённых на голени — на протяжении 100 временных отсчётов для каждого шага. В одном режиме она используется для генерации: имея несколько чистых примеров от человека, сеть создаёт новый реалистичный цикл походки в его стиле. В другом режиме — для восстановления: имея частично искажённый или зашумлённый сигнал походки и несколько чистых примеров, она восстанавливает полный чистый цикл. Во время мета-тренировки параметры сети корректируются во вложенных циклах так, чтобы небольшого числа шагов донастройки на новых данных было достаточно для специализации на новом субъекте.
Тестирование системы на ограниченных данных
Команда проверяет MetaGait в строгих сценариях «few-shot», когда модель видит лишь один или пять циклов походки нового человека, прежде чем её попросят сгенерировать или восстановить дополнительные. Их сравнивают с двумя распространёнными базовыми подходами: обучением модели с нуля только на этих нескольких примерах и предварительной тренировкой общей модели на большом наборе данных с последующей донастройкой. По стандартным метрикам точности для последовательностей движения MetaGait стабильно генерирует более точные и естественно выглядящие шаблоны походки, чем оба базовых варианта, как для генерации, так и для восстановления. Она не только лучше заполняет пропуски и устраняет шум, но делает это, сохраняя индивидуальный стиль.
Что это может значить в повседневной жизни
Для неспециалистов главный вывод таков: MetaGait показывает, что можно создавать персонализированные модели ходьбы, имея очень мало данных от каждого человека. Это может ускорить подгонку роботических экзоскелетов или протезов, помочь клиницистам оценивать проблемы с походкой без долгих тестовых сессий и позволить виртуальным персонажам двигаться как их реальные пользователи после короткой калибровки. Хотя в будущем нужно повысить эффективность обучения и протестировать метод в полевых условиях, исследование демонстрирует перспективный путь к быстрому, точному и сильно персонализированному анализу нашей походки.
Цитирование: Yadav, R.K., Nandi, A., Sharma, D.A.K. et al. A meta learning framework for few shot personalized gait cycle generation and reconstruction. Sci Rep 16, 5506 (2026). https://doi.org/10.1038/s41598-026-35121-4
Ключевые слова: анализ походки, персонализированное движение, метаобучение, ношемые датчики, движение человека