Clear Sky Science · ru
Метод дальнодействующей внешней калибровки LiDAR — камера для железнодорожного транспорта
Обеспечение безопасности поездов на дальнем расстоянии
Современные беспилотные поезда полагаются на электронные «глаза», которые отслеживают рельсы на наличие препятствий задолго до того, как их заметил бы человек. Двумя из важнейших таких «глаз» являются камеры и лазерные сканеры — LiDAR — которые воспринимают мир по‑разному. Чтобы работать вместе, они должны быть выровнены с высокой точностью — задача, которая становится особенно сложной, когда контроль ведется на сотни метров. В этом исследовании предложен новый способ выравнивания этих датчиков, позволяющий надежно защищать железнодорожную инфраструктуру на больших расстояниях.
Почему важно выравнивание датчиков
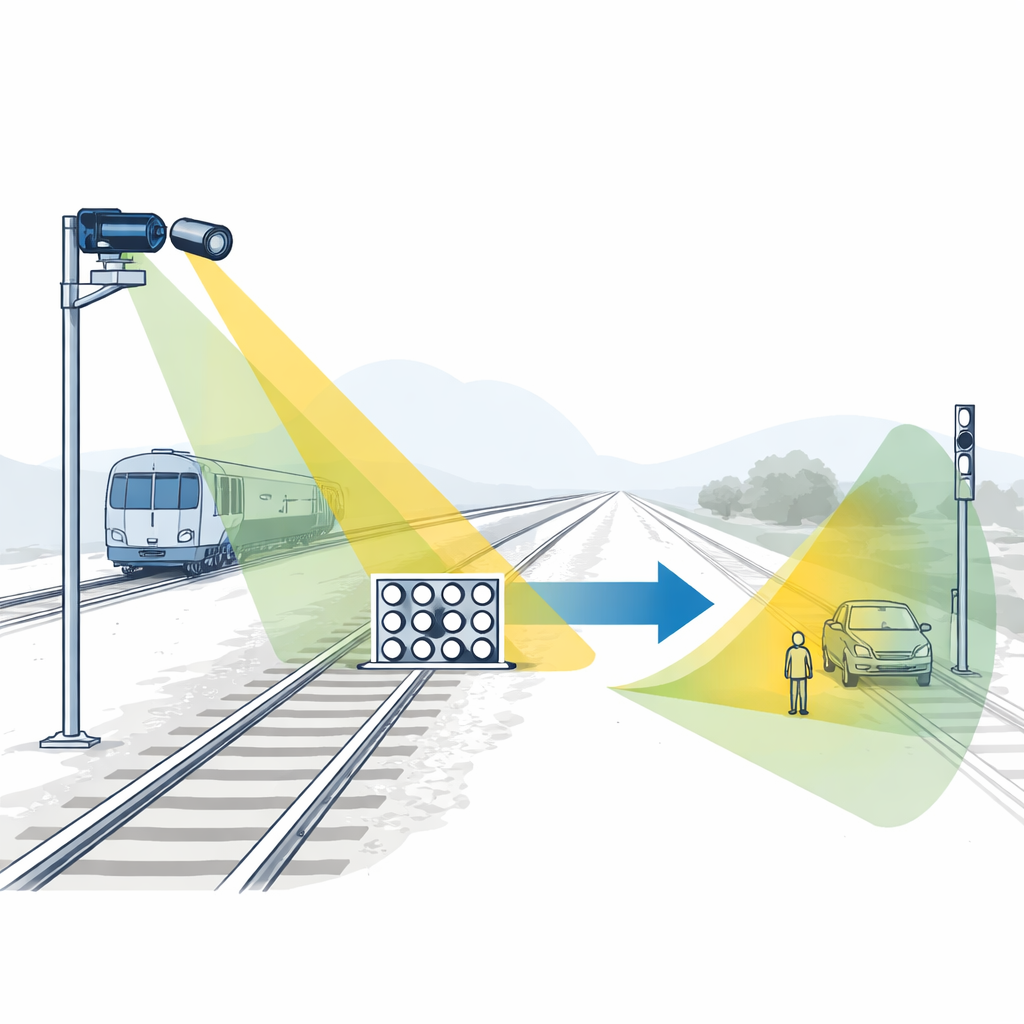
В автономном поезде камеры запечатлевают подробные цветные изображения, тогда как LiDAR измеряет расстояние, посылая световые импульсы и фиксируя время их возврата. Слияние этих двух представлений позволяет системе обнаруживать и отслеживать объекты, которые могут вторгнуться в зону путей — от заглохшего автомобиля на переезде до обломков на рельсах. Но слияние работает только в том случае, если система точно знает взаимное расположение камеры и LiDAR. Небольшое смещение может сдвинуть обнаруженное препятствие на десятки сантиметров или даже метров на большом расстоянии, что сделает автоматические системы защиты медленнее или менее надежными.
Проблема видимости на дальних участках пути
Для железнодорожных приложений инженеры часто используют телеобъективы, чтобы камера могла четко видеть объекты на сотни метров. На таких дистанциях, однако, отражения LiDAR от любой калибровочной мишени становятся очень разреженными: на щит, используемый для выравнивания датчиков, попадает лишь несколько лазерных точек. Большинство существующих методов калибровки предполагают плотное облако точек LiDAR или наличие насыщенных границ в сцене — условия, которые на дальнем расстоянии просто не выполняются. В результате становится трудно с нужной точностью сопоставить признаки между 2D‑изображением и 3D‑облаком точек, чтобы обеспечить безопасное управление поездом.
Умная калибровочная панель
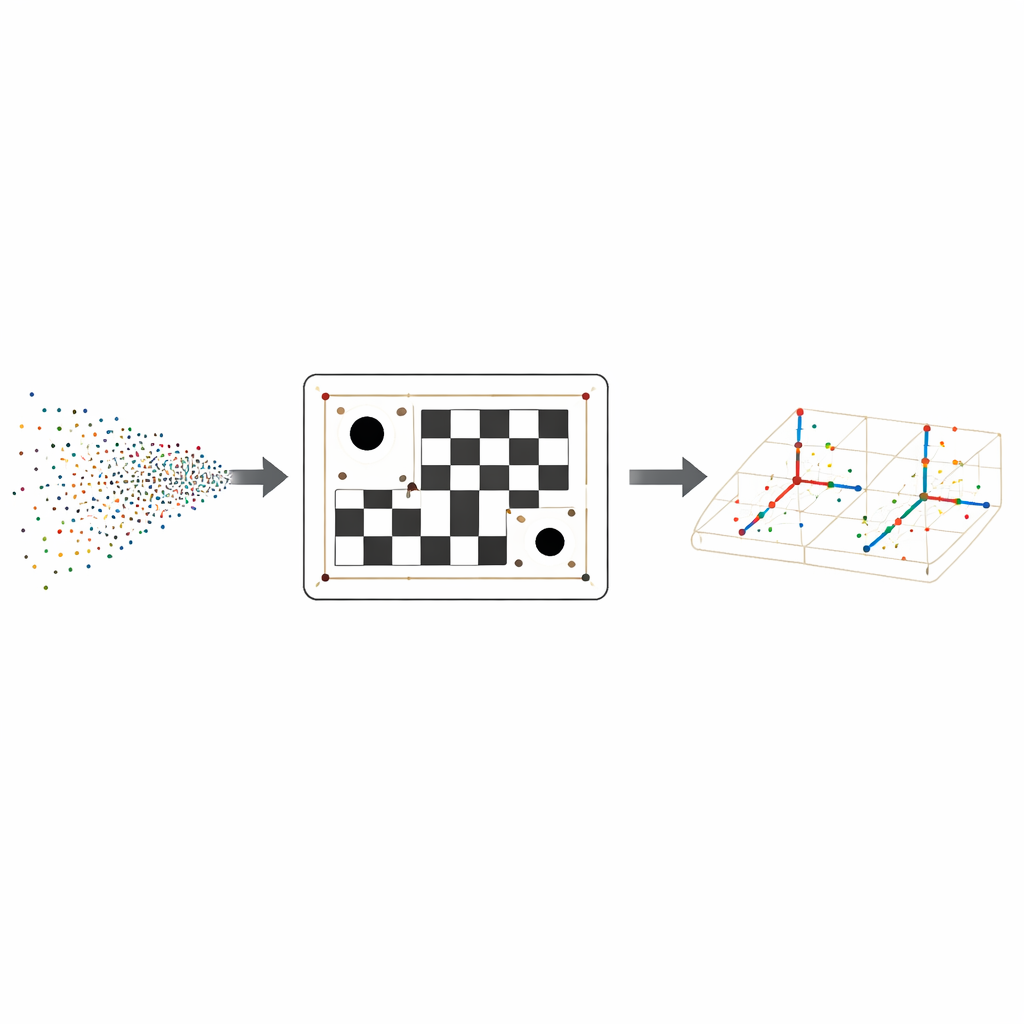
Чтобы преодолеть эти трудности, авторы разработали специальную калибровочную панель, сочетающую привычную черно‑белую шахматную разметку и три круглых отверстия, центры которых образуют несимметричный треугольник. Шахматная разметка дает множество точных углов в изображении камеры, тогда как отверстия создают сильные геометрические признаки для LiDAR — его легко обнаруживать по круговым краям даже с большого расстояния. Поскольку три отверстия расположены в асимметричном треугольнике, ориентация панели в пространстве определяется однозначно, что исключает путаницу из‑за зеркальных или повернутых видов.
Преобразование разреженных точек в надежные соответствия
Со стороны LiDAR метод сначала очищает облако точек и аппроксимирует плоскость, соответствующую панели. Затем точки проецируются на эту плоскость, и применяется устойчивая процедура подгонки круга для нахождения центра каждого отверстия с последующей уточняющей корректировкой, учитывающей известные физические расстояния между отверстиями. После установления треугольника центров отверстий алгоритм строит локальную координатную сетку по панели, предсказывает, где в 3D должны располагаться все углы шахматной разметки, и проверяет вблизи лежащие точки LiDAR на предмет соответствующих значений яркости, то есть отражательной способности. Это сочетание геометрии и отражательной способности превращает несколько рассеянных возвратов в надежный набор 3D‑координат углов, соответствующих 2D‑углам на изображении камеры.
Точная настройка взаимного расположения датчиков
Когда одни и те же физические углы идентифицированы и в изображении камеры, и в облаке LiDAR, авторы определяют точные угловые и трансляционные параметры, связывающие оба датчика. Они применяют итеративную оптимизацию, которая многократно настраивает это преобразование, чтобы уменьшить расхождение между местами, куда LiDAR проецирует точки на изображение, и реальным положением углов, видимых камерой. Испытания на реальной железнодорожной платформе с использованием объективов разной фокусной длины — от умеренных до сильных телеобъективов — показывают, что новый метод стабильно удерживает ошибку проекции примерно на уровне одного пикселя или меньше и превосходит несколько известных альтернатив, особенно на наибольших фокусных расстояниях, где данных особенно мало.
Что это значит для безопасности железных дорог
Проще говоря, исследование предлагает более надежный способ сообщить камере и LiDAR в автономном поезде: «вы находитесь здесь и смотрите именно в этом направлении». Переработав калибровочную панель и добавив «умную» обработку разреженных данных LiDAR, метод сохраняет высокую точность даже при наблюдении сцен на сотни метров. Эта более тесная калибровка позволяет объединенной системе точнее размещать препятствия в 3D‑пространстве, укрепляя технологическую базу для более безопасного железнодорожного транспорта и более доверительного многодатчикового восприятия в реальных условиях.
Цитирование: Liu, X., Wang, H., Ruan, S. et al. A long-range LiDAR–camera extrinsic calibration method for rail transit. Sci Rep 16, 8018 (2026). https://doi.org/10.1038/s41598-025-34547-6
Ключевые слова: безопасность железнодорожного транспорта, слияние LiDAR и камеры, калибровка датчиков, автономные поезда, дальнее обнаружение