Clear Sky Science · ru
3D-реконструкция мелководных подводных структур с использованием прямой калибровки системы и выделения слабой лазерной линии
Выявление скрытых подводных миров
Многие из самых увлекательных следов нашего прошлого ныне лежат под водой — кораблекрушения, затопленные города и прибрежные руины. Чтобы исследовать и сохранять эти места в цифровом виде, учёным нужны точные 3D-карты того, что лежит на дне. Однако на мелководье яркое солнце, взвешенный песок и сама вода делают точные измерения удивительно трудными. В этой статье представлен новый способ сканирования и реконструкции детализированных 3D-моделей подводных структур с использованием малоэнергетического синего лазера, даже в освещённых солнцем и «шумных» условиях, где существующие методы в целом не справляются.
Почему сканирование мелководья так сложно
Создание цифровой 3D-модели сцены обычно означает сбор миллионов точек в пространстве — то, что учёные называют облаком точек. На суше лазеры и камеры справляются с этим надёжно. Под водой всё усложняется. Вода преломляет и рассеивает свет, заливая сцены синевато-зелёным туманом и размывая контуры. Солнечный свет, проходящий через волны, создаёт яркие движущиеся узоры — каустики, которые могут заглушать тонкую линию малоэнергетического лазера. Микроскопические частицы создают вуаль тумана и мерцающие отражения. В результате многие существующие подводные системы работают только ночью, при очень слабом освещении или в строго контролируемых условиях, а не в реальных морских условиях.
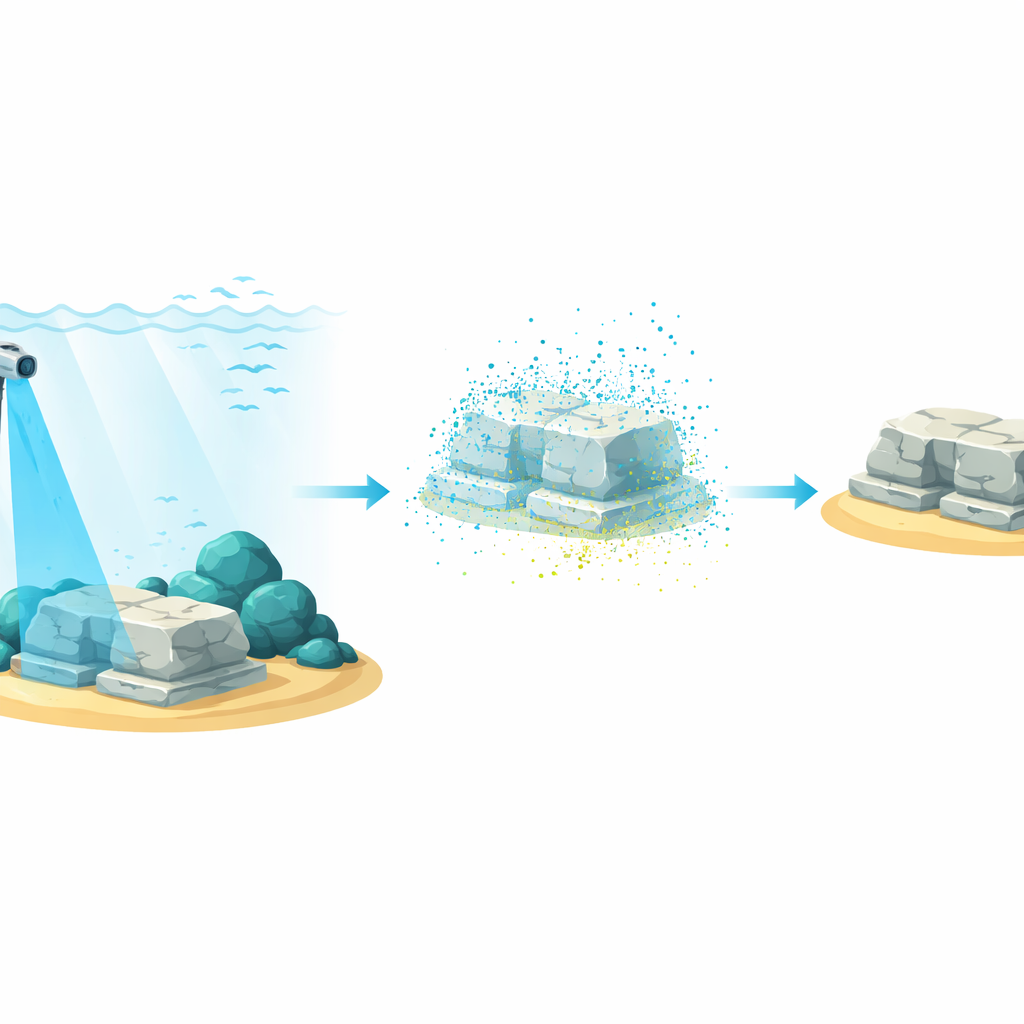
Вращающийся синий лазер как 3D-кисть
Авторы создали компактный водонепроницаемый сканер, действующий как 3D-кисть. Он проецирует тонкий вертикальный лист синего лазерного света, который вращается, когда рука устройства медленно поворачивается. Там, где этот лист касается камня, стены или артефакта, он оставляет светящуюся кривую. Камера, установленная рядом с лазером, делает снимки на каждом небольшом шаге поворота. Комбинируя все эти виды, система может реконструировать плотное 3D-облако точек окружающей среды, с приблизительной цветовой информацией, которое затем можно превратить в поверхностную сетку для визуализации или виртуальной реальности.
Обучение системы определять, где в пространстве находится каждый пиксель
Ключевая задача в таких системах — калибровка: выяснить, как каждый пиксель камеры соотносится с координатами в реальном мире. Традиционные подходы опираются на подробные математические модели камеры и воды с десятками параметров, которые нужно подгонять, что делает их хрупкими и склонными к ошибкам. Здесь исследователи идут по пути, ориентированному на данные. Они напрямую обучают отображение от пикселей изображения к 3D-позициям, сканируя стену, покрытую известной сеткой. Нужны всего лишь несколько сотен тщательно выбранных контрольных точек. Оказавшись в таблице поиска, эта карта позволяет сканеру преобразовывать любой обнаруженный лазерный пиксель в 3D-точку, без явного решения сложных уравнений камеры.
Выпрямление и усиление слабого синего следа
Поскольку калибровка проводится в воздухе, подводные кадры сначала нужно «выпрямить», чтобы отменить искажения, вызванные преломлением на границе вода-воздух. Команда измеряет эту деформацию с помощью изображений сетки, пересекающей границу воздуха и воды, а затем вычисляет, как каждый подводный пиксель сместился бы, если бы он наблюдался в воздухе. После этого, собственно, начинается основной трюк: обнаружение слабой, часто прерывистой синей линии в шумном изображении. Метод сначала вычисляет для каждого пикселя значение «синевы», настроенное так, чтобы свет, близкий по тону к лазерному синему, выделялся. Затем оценивается, насколько каждый пиксель синее по сравнению с соседями, и используется классификатор машинного обучения для формирования грубой чёрно-белой карты вероятных лазерных пикселей.
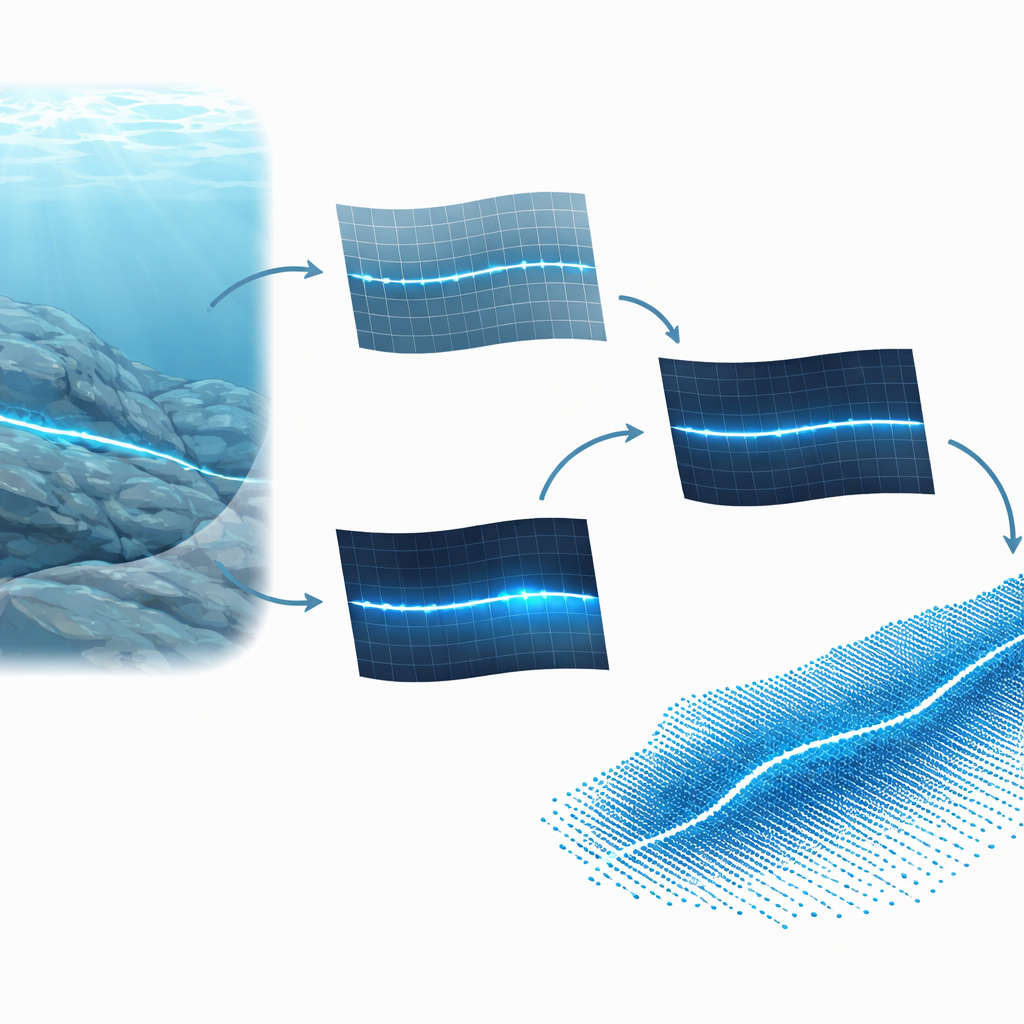
От шумных точек к чистым 3D-формам
Эта первая карта всё ещё содержит множество ложных срабатываний от песка, отражений и каустик. Чтобы очистить её, система ищет шаблоны прямых линий с помощью классической техники, которая голосует за возможные линии на основе положения пикселей. Оставляют только те линии, которые соответствуют ожидаемой ориентации лазера. Затем через оставшиеся точки аппроксимируют гладкую кривую, и «уверенность» каждого пикселя повышается, если он лежит близко к этой кривой и обладает высокой синевой. Для каждой строки изображения пиксель с наивысшей уверенностью выбирается как часть итогового следа лазера. Подавая эти очищенные следы шаг за шагом в таблицу калибровки, получают 3D-облако точек, раскрашенное по оригинальному изображению камеры.
Насколько это хорошо работает в реальной воде?
Авторы протестировали систему в баках и в мелководном море на глубине примерно пяти метров при освещении от тусклого уровня в помещении до яркого полуденного солнца с десятками тысяч люкс. Они сканировали объекты с точно известными размерами — шар и изготовленную из акрила форму — и сравнивали измеренные размеры с эталоном. На расстояниях до примерно полуметра типичная погрешность оставалась ниже долей миллиметра даже при ярком свете и сохранялась в пределах нескольких десятых миллиметра на больших расстояниях, пока линия лазера не становилась практически невидимой для глаза. Существующие методы, рассчитанные на тёмные условия, вовсе не могли реконструировать сцены при таких уровнях освещённости.
Что это значит для исследования подводных объектов
По сути, эта работа показывает, что для точного 3D-картирования мелководных подводных структур не требуются громоздкие мощные лазеры или идеально тёмная среда. Тщательно корректируя преломление света в воде, подчёркивая цвет лазера и используя прямую калибровку, связывающую пиксели с реальными координатами, система способна надёжно извлечь слабый синий след из шумных, освещённых солнцем сцен. Хотя работа теряет эффективность в чрезвычайно ярких условиях и при некоторых цветах объектов, подход открывает путь к более рутинному, недорогому сканированию рифов, стен портов и затонувших руин, помогая учёным и реставраторам создавать достоверные цифровые копии подводных миров.
Цитирование: Garai, A., Kumar, S. 3D reconstruction of shallow sea structures using direct system calibration and faint laser line extraction. Sci Rep 16, 9321 (2026). https://doi.org/10.1038/s41598-025-25736-4
Ключевые слова: подводное 3D-сканирование, реконструкция лазерной линии, картирование мелководья, изображение облака точек, подводная археология