Clear Sky Science · ru
Открытый эталонный набор данных для машинного обучения и интеллектуальной оптимизации траектории в самолетах- БПЛА с неподвижным крылом
Почему важны более разумные полёты дронов
От обследований сельхозугодий до поисково-спасательных операций — беспилотники с неподвижным крылом всё чаще выполняют важную работу в небе над нами. Повышение надёжности этих летательных аппаратов и снижение их зависимости от пилота могут обеспечить более безопасные доставки, более точный экологический мониторинг и более устойчивые операции в чрезвычайных ситуациях или зонах конфликта. Однако прогресс всё чаще сдерживается не нехваткой идей, а отсутствием реальных полётных данных. В этой статье представлен новый открытый набор данных сотен автономных полётов, созданный так, чтобы инженеры и студенты по всему миру могли разрабатывать и тестировать более умные алгоритмы управления полётом на единой, богатой общей базе.
Летающая лаборатория для реальных миссий
Авторы собрали свой набор данных на надёжном моторно-планёровом самолёте Volantex Ranger 2400. С размахом крыла два с половиной метра, эффективной формой крыла и просторной фюзеляжем этот аппарат может нести современную электронику и при этом оставаться в воздухе длительное время в стабильных режимах. Его приводит заднемоторная электрическая установка и специализированный литий‑ионный аккумуляторный блок, настроенный скорее на выносливость, чем на кратковременные всплески мощности. Команда выполняла полёты в полностью автономном режиме по заранее подготовленным маршрутам, охватывающим ключевые фазы полёта: взлёт, прямолинейное крейсерское движение, крутые развороты, динамические манёвры и автоматические посадки. Эта контролируемая, но реалистичная конфигурация превращает Ranger в летающую лабораторию, которая моделирует поведение небольших оперативных беспилотников, используемых в гражданских и оборонных задачах.
Два «мозга», один самолёт
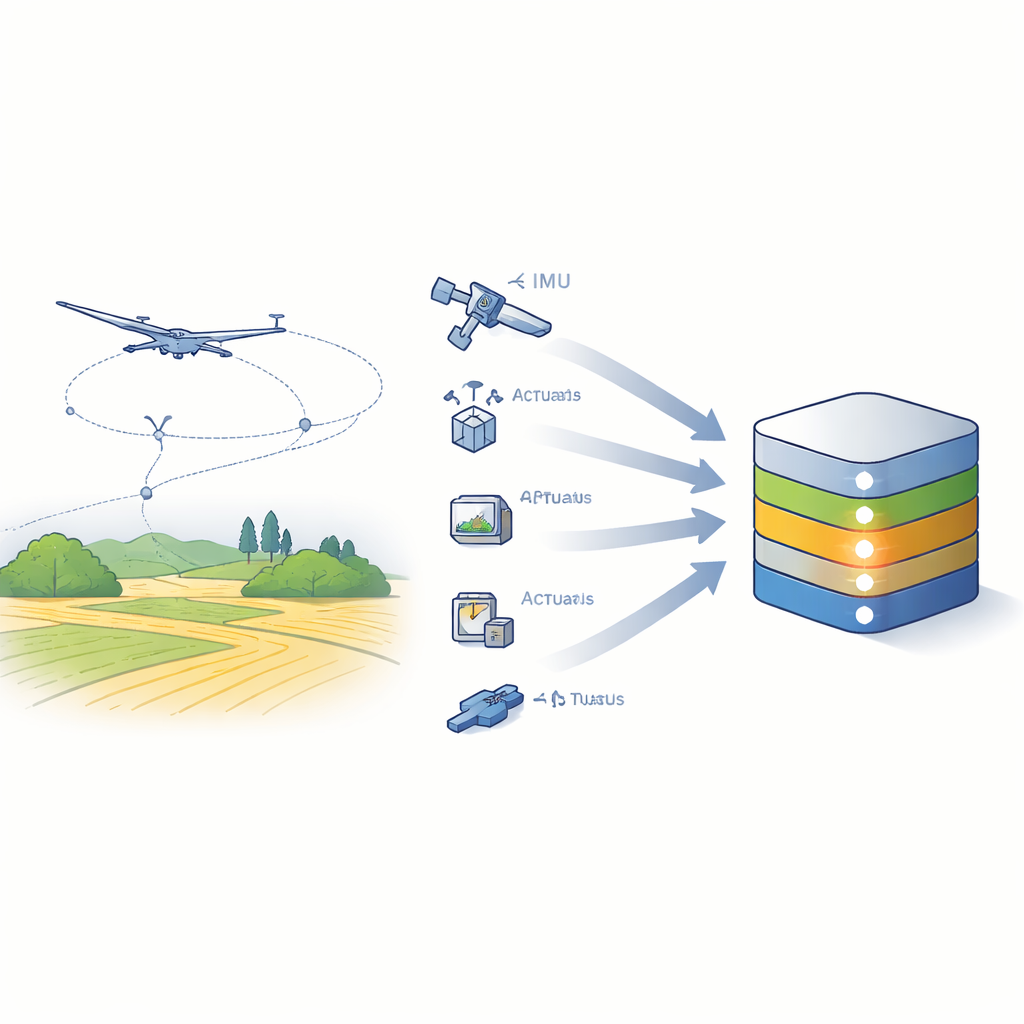
Чтобы охватить широкий спектр сценариев, исследователи оснастили один и тот же аэроблок двумя очень разными «мозгами». В одной конфигурации использовался компактный и недорогой контроллер полёта SpeedyBee F405, близкий по духу к электронике, которую хоббисты ставят на самодельные дроны. Другая конфигурация сочетала профессиональный автопилот Pixhawk 6X с мощным компьютером Jetson Orin NX, способным запускать ресурсоёмкое программное обеспечение искусственного интеллекта прямо на борту. Обе системы регистрируют подробную телеметрию, включая данные инерциальных датчиков, GPS‑положение и скорость, высоту, воздушную скорость, команды на рулевых поверхностях, состояние батареи и режим полёта с частотами, достаточными для восстановления движения аппарата в тонких деталях. Сохраняя неизменной конструкцию самолёта при замене электроники, набор данных позволяет исследовать, как разные уровни бортовых вычислений и сенсоров влияют на поведение в полёте.
Что содержится в наборе данных
Результирующая коллекция IDF‑DS включает 240 автономных полётов, примерно 32 часа в воздухе и десятки миллионов зафиксированных образцов. Каждый полёт сохранён в единообразной структуре папок, чтобы пользователи могли быстро найти основной лог, план миссии, настройки контроллера и готовый для просмотра GPS‑трек. Одна серия миссий следует зигзагообразному шаблону над прямоугольным полем — идеально подходит для повторяемых сравнений или обучения предсказательных моделей. Другая повторяет петлю, напоминающую трассу вроде MotoGP, вводя резкие повороты, широкие виражи и прямые участки, испытывающие автопилот. Для каждой конфигурации и миссии логи фиксируют то, как самолёт фактически летел, а не только то, как он должен был лететь.
Преобразование сырых полётов в выводы
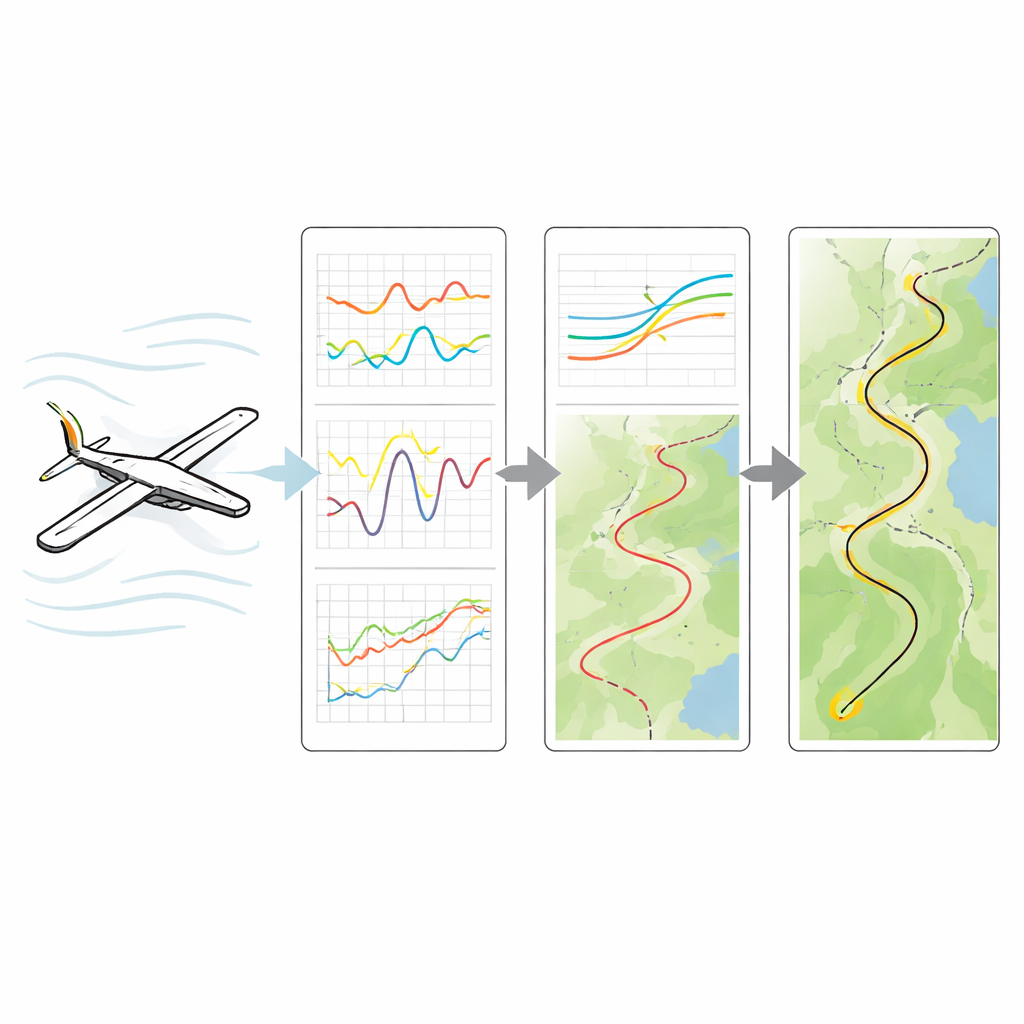
Чтобы продемонстрировать, что можно сделать с этой сокровищницей данных, авторы проводят несколько примерных анализов. Они проверяют качество бортовых датчиков движения, сопоставляя их с ускорениями и угловыми скоростями, выведёнными из траектории на основе GPS, подтверждая, что измерения достаточно надёжны, чтобы служить «эталоном» при обучении моделей. Исследуются точность оценок скорости автопилотом по трем осям, насколько точно аппарат следует запланированной траектории и сколько электроэнергии он потребляет при наборе высоты, поворотах и стабильном крейсерском полёте. Комбинируя воздушную скорость, скорость относительно земли и ориентацию, они даже восстанавливают поле ветра, которое испытывал самолёт вдоль маршрута, строя картину порывов и боковых ветров исключительно по бортовым показаниям. Другой сценарий применения описывает, как те же потоки данных могли бы быть использованы для обучения модели искусственного интеллекта оценивать положение при недоступности спутниковой навигации.
Как этот ресурс помогает будущим полётам
В обыденном понимании эта работа даёт сообществу общую «чёрную ящик» сотен полётов, который может открыть каждый. Вместо того чтобы каждой команде приходилось собирать свои дорогие экспериментальные данные и держать их в частном доступе, исследователи и студенты могут скачать этот открытый набор данных и сразу приступить к поиску новых способов удерживать дроны на курсе при отказе GPS, выявлять неисправности до того, как они станут опасными, или продлевать время работы от батареи, выбирая более эффективные маршруты. Сам документ не создаёт эти умные системы — он создаёт фундамент, необходимый для их появления. Для читателя главный вывод таков: прогресс в воздушной автономии сегодня зависит не меньше от открытых, тщательно задокументированных записей полётов, чем от хитроумных алгоритмов, и этот набор данных — заметный шаг в направлении такого будущего.
Цитирование: García-Gascón, C., Bas-Bolufer, J., Castelló-Pedrero, P. et al. An open benchmark dataset for machine learning and intelligent trajectory optimization in fixed-wing unmanned aerial systems. Sci Data 13, 364 (2026). https://doi.org/10.1038/s41597-026-06716-3
Ключевые слова: беспилотники с неподвижным крылом, телеметрия полёта, автономная навигация, набор данных для машинного обучения, оптимизация траектории