Clear Sky Science · ru
SPICE-HL3: набор данных однопореточного, инерциального и стереокамерного датасета для исследования ландшафтов Луны на высоких широтах
Почему лунные тени важны для роботов
Будущие миссии в полярные районы Луны рассчитывают использовать замороженную воду и другие ресурсы, но эти области также одни из самых визуально запутанных в Солнечной системе. Длинные движущиеся тени, ослепляющий блеск и практически полная темнота легко могут ввести в заблуждение камеры роботов. В этой статье представлен SPICE‑HL3 — новый открытый набор данных, созданный в лабораторной «части Луны», который позволяет ученым по всему миру проверять, как роботы видят и ориентируются в суровых полярных условиях, в том числе с помощью передовой одно‑фотонной камеры, которая буквально умеет видеть в темноте.
Создание участка лунных полюсов на Земле
Поскольку реальные данные с лунных полюсов редки и дороги в получении, команда построила контролируемую испытательную площадку под названием LunaLab в Университете Люксембурга. Это закрытый ландшафт размером 11 на 8 метров, заполненный крупной базальтовой галькой, камнями и кратерами, окруженный черными стенами и потолком, чтобы имитировать светопоглощающее, бессредовое окружение Луны. Мощный подвижный прожектор имитирует Солнце, находящееся очень низко над горизонтом, создавая длинные резкие тени и огромные различия яркости между освещенными склонами и абсолютно темными интерьерами кратеров. Меняя положение и мощность лампы, исследователи воспроизвели четыре различных режима освещения — эталонный, полуденный, рассвет/закат и ночной — похожие на те, что испытывал бы ровер в течение лунного дня вблизи полюсов. 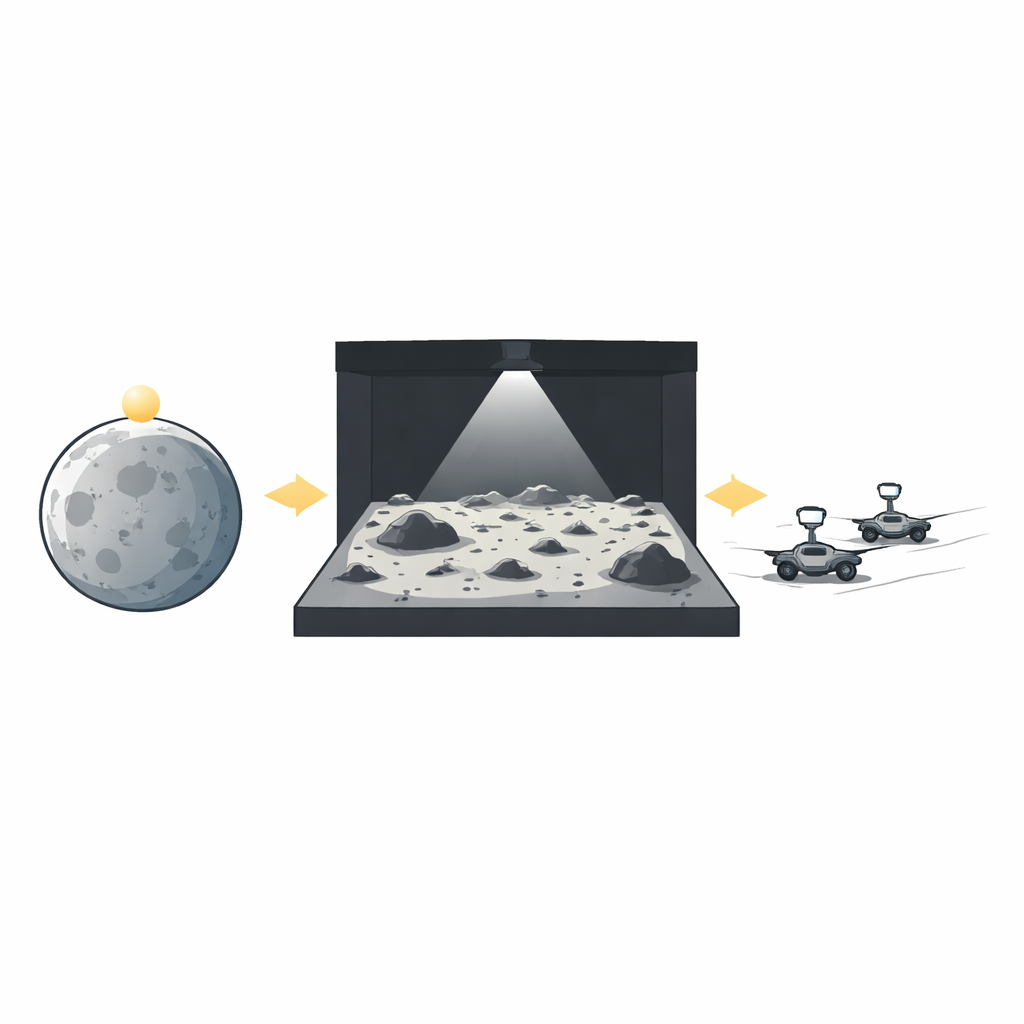
Роверы, датчики и камера, считающая отдельные фотоны
Данные собирали два небольших колесных ровера, несли разные комбинации камер и датчиков движения. Один ровeр был оснащен обычной монохромной камерой и новой одно‑фотонной лавинной фотодиодной (SPAD) камерой; другой — стереокамерой цвет‑плюс‑глубина с встроенным датчиком движения. Оба ровера записывали вращение колес и инерциальные данные, а система захвата движения сверху отслеживала их истинные положения с субмиллиметровой точностью. SPAD‑камера — ключевая технология: вместо измерения света как плавной величины интенсивности каждый пиксель сообщает, зафиксировал ли он отдельный фотон, с чрезвычайно высокой скоростью и чувствительностью. Скомбинировав множество таких ультрабыстрых бинарных снимков, система может реконструировать изображения, сохраняющие детализацию даже в очень тусклых или чрезвычайно контрастных сценах, где обычные камеры склонны к размытию или засветке.
Фиксация луноподобных поездок в разных вариациях
Чтобы предоставить исследователям богатую тестовую среду, авторы разработали семь типов траекторий ровера: от длинных поездок с остановками и троганием, имитирующих осторожное планетарное вождение, до коротких непрерывных проходов в разных направлениях относительно искусственного Солнца (по направлению к нему, от него и вбок) и резких разворотов на месте. Они повторяли эти маршруты на медленной скорости ходьбы и в десять раз быстрее, в разных режимах освещения, иногда с включенными фарами ровера, иногда без. В сумме SPICE‑HL3 содержит 88 синхронизированных по времени последовательностей, почти 1,3 миллиона изображений и соответствующие данные движения и эталонные (ground‑truth) данные. Изображения охватывают статичные сцены, подходящие для тщательного анализа, и быстрые последовательности, нагружающие размытие движения и управление экспозицией. Всё организовано в чёткой структуре файлов с калибровочными файлами, которые точно описывают ориентацию каждой камеры и датчика и синхронизацию их часов по времени.
Испытание одно‑фотонного зрения
Помимо простого опубликования данных, команда проверила качество и полезность записанных изображений. Они сравнили, как SPAD, монохромная камера и стереокамера справляются с одними из самых сложных визуальных ситуаций: поездки в сумерках и ночью, а также заезды, когда ровeр смотрит прямо в «Солнце». Используя простые метрики качества изображения и визуальную проверку, они обнаружили, что одно‑фотонная камера последовательно сохраняла структуру как в ярких, так и в затененных областях, поддерживала широкий диапазон уровней яркости и оставалась стабильной в различных условиях. Традиционные камеры показывали хорошие результаты при хорошем освещении, но теряли детали в очень темных областях или пересвечивали ближние к источнику света участки. Авторы также подтвердили, что распространённое программное обеспечение для картографии и локализации успешно обработало набор данных, удостоверившись, что временные метки, калибровки и форматы достаточно надежны для реальных робототехнических исследований. 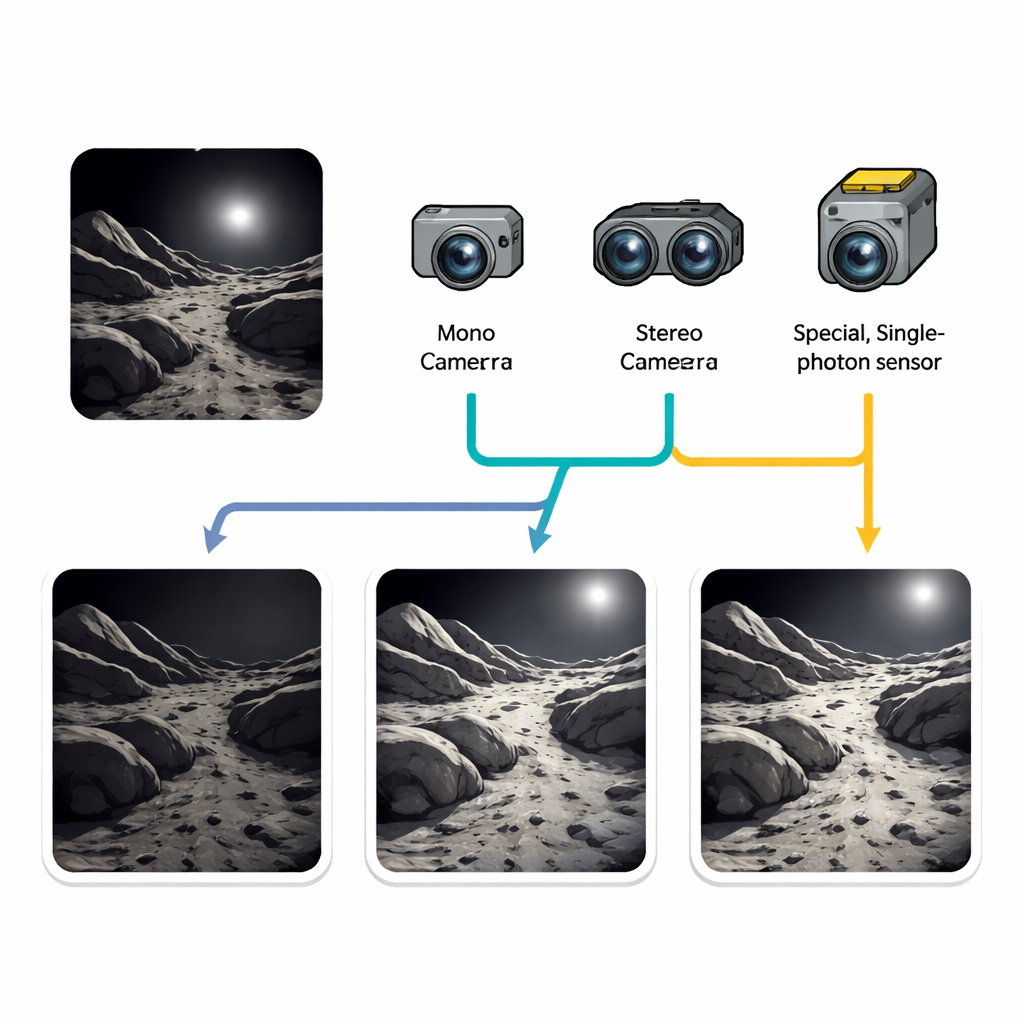
Ограничения, оговорки и почему это важно
Хотя LunaLab не может идеально воспроизвести крошечные частицы пыли и тонкие эффекты рассеяния света настоящего лунного реголита, и в самые тёмные сцены частично проникло непреднамеренное инфракрасное свечение от системы захвата движения, авторы утверждают, что SPICE‑HL3 по‑прежнему представляет собой требовательную «наихудшую» оптическую среду для зрения ровера. Для инженеров и учёных, готовящих миссии к лунным полюсам — или проектирующих роботов для любых тусклых, высококонтрастных сред — набор данных предлагает редкий общедоступный эталон. Он позволяет объективно сравнивать новые камерные технологии, такие как SPAD‑датчики, с традиционными системами, улучшать алгоритмы навигации и картографии и в конечном счёте помогать обеспечивать, чтобы будущие роверы могли безопасно продолжать движение через меняющиеся лунные тени, а не оказались в ловушке во тьме.
Цитирование: Rodríguez-Martínez, D., van der Meer, D., Song, J. et al. SPICE-HL3: Single-Photon, Inertial, and Stereo Camera dataset for Exploration of High-Latitude Lunar Landscapes. Sci Data 13, 374 (2026). https://doi.org/10.1038/s41597-026-06668-8
Ключевые слова: лунная робототехника, планетарная навигация, одно‑фотонная визуализация, наборы данных для машинного зрения роботов, экстремальное освещение